
一种旋转式搬运机器人.pdf

雅云****彩妍


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种旋转式搬运机器人.pdf
本发明公开了一种旋转式搬运机器人,包括底座,所述底座的下侧和操作平台的上侧固定连接,所述底座的上方固定连接有竖管,所述竖管内贯穿转动套接有主轴,所述主轴的下端套接第二传动齿轮,所述竖管的一侧设置有第一电机,所述第一电机的输出轴一端设置有第一传动齿轮,所述第一传动齿轮和第二传动齿轮传动啮合,所述主轴的上端和横管的下侧固定连接,所述横管的一端设置有第二电机,该旋转式搬运机器人,结构简单使用,通过第一电机实现了对横管的转动的功能,通过第二电机实现了滑杆的伸缩的功能,通过液压缸实现了夹具的升降功能,并通过连接板和

一种圆盘旋转式码垛搬运机器人控制系统.pdf
本发明公开了一种圆盘旋转式码垛搬运机器人控制系统,包括第一气缸、连接板、气缸杆、检查窗、箱盖、第二气缸、抓取机构、底板、第一夹爪、销轴、滑槽、第二夹爪、安装座、转轴、底盘、防撞块、连杆、连接机构、上连接柱、上凸起、下连接柱、下凸起、滚珠、外齿轮、内齿轮、上连接轴、电机、外壳、出风口、支撑座、控制器、下连接轴和扇叶。本发明通过设置圆形的底盘,且圆形底盘上安装有四个均匀设置的抓取机构,通过控制器控制电机的运转,电机带动底盘的转动,从而实现抓取机构抓取物体进行存放;通过第一气缸控制抓取机构进行抓取操作,通过第二
一种旋转式材料搬运机.pdf
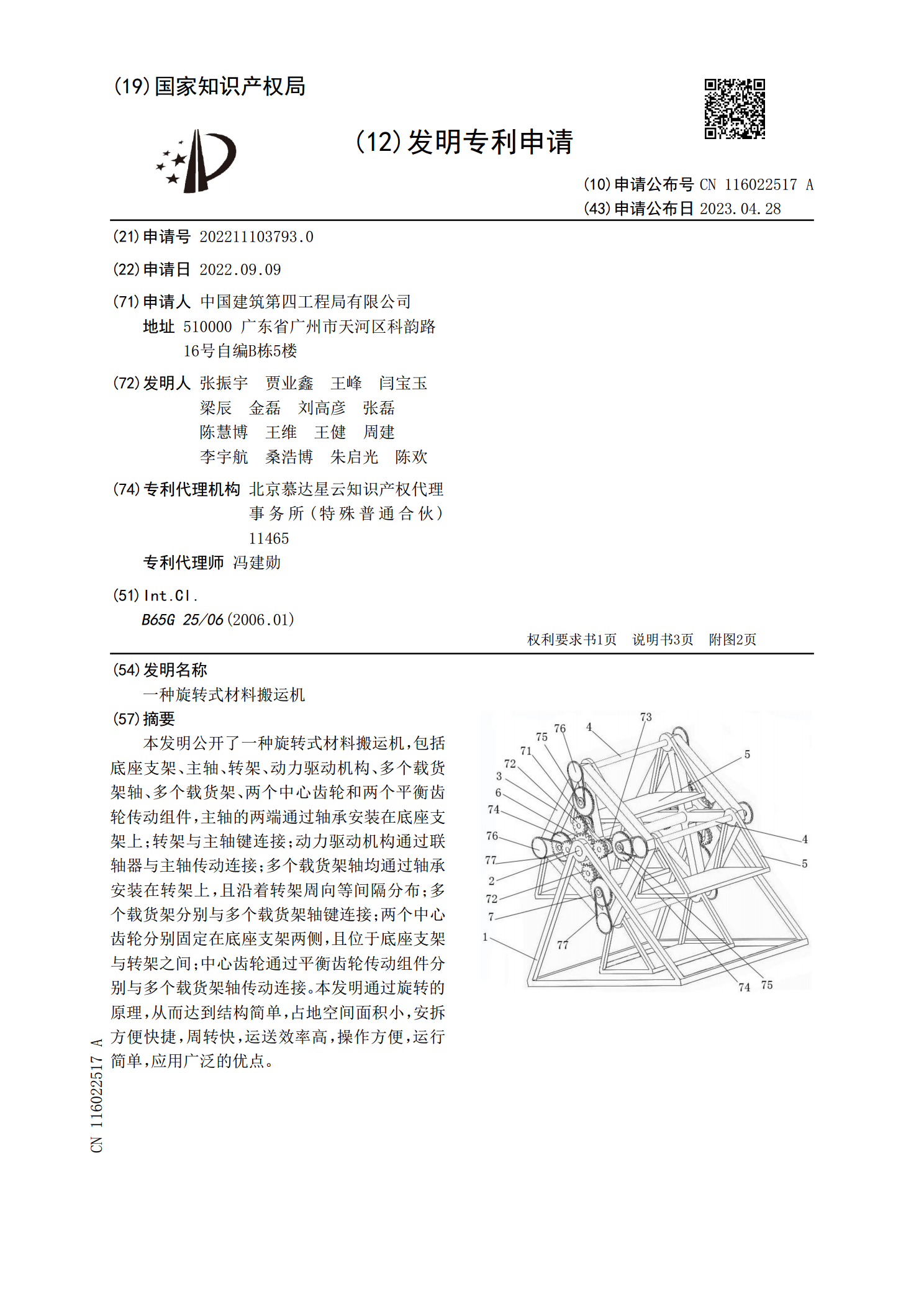
本发明公开了一种旋转式材料搬运机,包括底座支架、主轴、转架、动力驱动机构、多个载货架轴、多个载货架、两个中心齿轮和两个平衡齿轮传动组件,主轴的两端通过轴承安装在底座支架上;转架与主轴键连接;动力驱动机构通过联轴器与主轴传动连接;多个载货架轴均通过轴承安装在转架上,且沿着转架周向等间隔分布;多个载货架分别与多个载货架轴键连接;两个中心齿轮分别固定在底座支架两侧,且位于底座支架与转架之间;中心齿轮通过平衡齿轮传动组件分别与多个载货架轴传动连接。本发明通过旋转的原理,从而达到结构简单,占地空间面积小,安拆方便快
一种多臂旋转式搬运装置.pdf
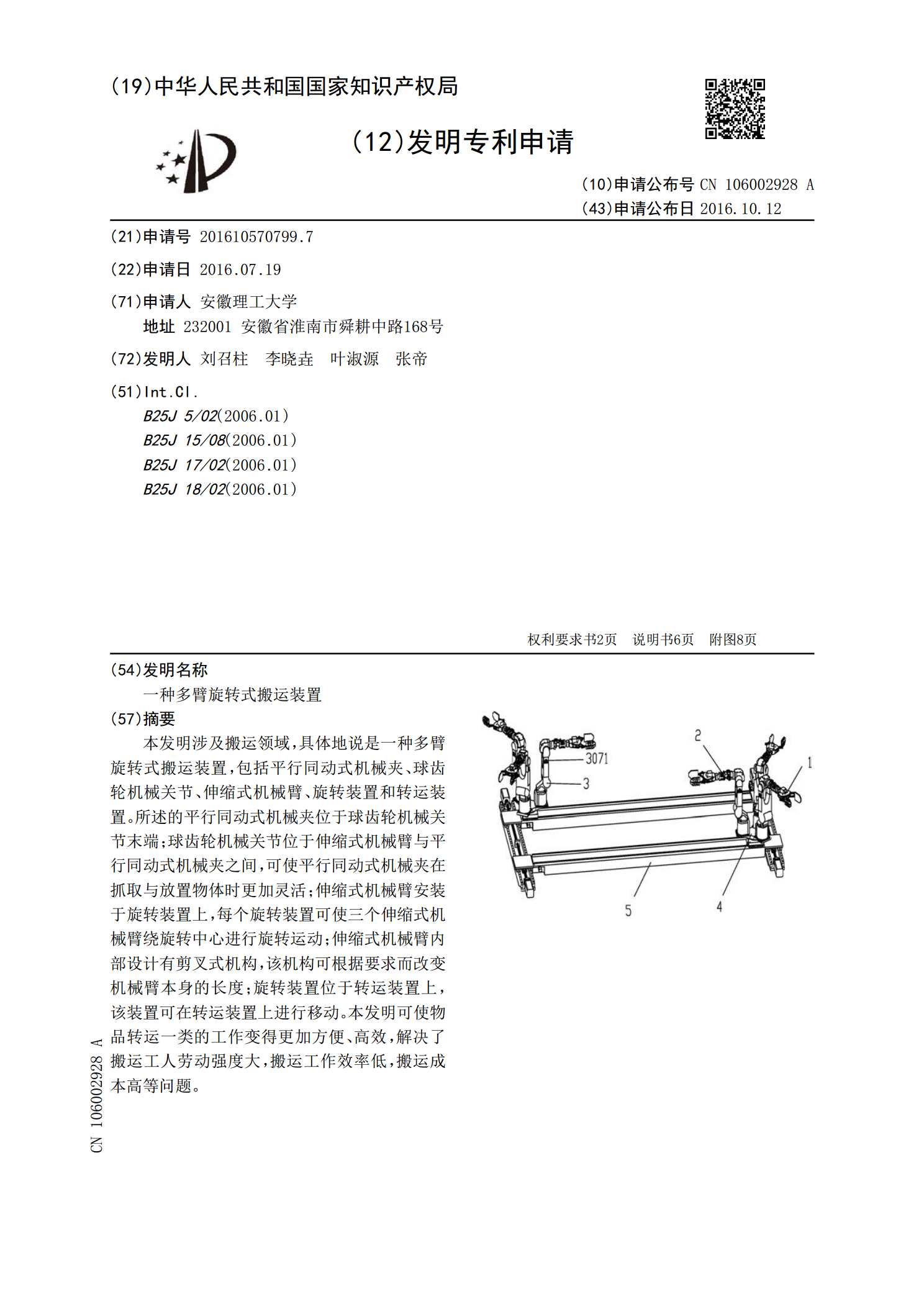
本发明涉及搬运领域,具体地说是一种多臂旋转式搬运装置,包括平行同动式机械夹、球齿轮机械关节、伸缩式机械臂、旋转装置和转运装置。所述的平行同动式机械夹位于球齿轮机械关节末端;球齿轮机械关节位于伸缩式机械臂与平行同动式机械夹之间,可使平行同动式机械夹在抓取与放置物体时更加灵活;伸缩式机械臂安装于旋转装置上,每个旋转装置可使三个伸缩式机械臂绕旋转中心进行旋转运动;伸缩式机械臂内部设计有剪叉式机构,该机构可根据要求而改变机械臂本身的长度;旋转装置位于转运装置上,该装置可在转运装置上进行移动。本发明可使物品转运一类

一种多臂旋转式搬运装置.pdf
本发明公开了一种多臂旋转式搬运装置,其结构包括接板、支撑柱、机械臂、高范围旋转装置、底座、旋转支柱,所述接板为圆盘状结构,切面为长方形长为4cm,截面为圆形半径为2cm,所述接板底端与支撑柱上端采用过盈配合方式活动连接,本发明一种多臂旋转式搬运装置,设有高范围旋转装置,首先通过连接口连接外部设备,支撑壁与支撑板对旋转轴承进行支撑,紧固口再加以紧固,使得旋转轴承可高范围旋转,加强了设备的旋转性能,从而解决了设备长期工作,旋转性能会消耗造成后期旋转卡顿的问题,避免了使用麻烦。