
基于磁锚定系统的电磁控制腹腔镜手术内置抓钳离合系统的设计.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于磁锚定系统的电磁控制腹腔镜手术内置抓钳离合系统的设计.docx
基于磁锚定系统的电磁控制腹腔镜手术内置抓钳离合系统的设计随着医学科技的发展,腹腔镜手术已成为常见的微创手术。其中,手术内置抓钳离合系统是其绝对的关键部分。本文将针对这一问题,基于磁锚定系统,探讨一种新的设计方案。一、方案设计1.1、磁锚定系统原理简介磁锚定系统是一种通过电流产生磁场,从而实现磁力作用的物理现象。利用这种现象,可以通过外部控制电磁铁的电流,从而实现离合系统的控制。1.2、方案具体实施方案本设计方案将采用磁锚定系统控制抓钳的离合。通过将磁铁固定在腹腔镜内部,通过电流来控制抓钳的运动。具体实施时

一种腹腔镜手术用抓钳.pdf
本发明提供了一种腹腔镜手术用抓钳,包括手柄组件、转向机构、开合单元和夹钳组件;所述手柄组件与转向机构铰接,且所述手柄组件驱动转向机构转动设置;所述开合单元包括一第一滑轮和两齿轮,所述转向机构、第一滑轮和一齿轮依次链接,两所述齿轮彼此啮合设置;所述夹钳组件包括两夹钳,两所述齿轮分别固定于两夹钳的顶部。本发明可以在腹腔镜手术中完成抓持、牵拉、分离、电凝止血等操作,更符合人体工程学原理,操控更便捷,使用方便安全;与角度单一、功能受限的现有手术器械相比具有明显优势。

一种用于腹腔镜手术的抓钳.pdf
本发明公开了一种用于腹腔镜手术的抓钳,包括外支撑套和设置在外支撑套内部的中支撑套,所述外支撑套顶端设置有下夹持板并且其下端与带有上夹持板的中支撑套螺纹连接,所述中支撑套下端螺纹连接有带有切割刀片的内支撑杆;所述外支撑套外围还设置有防漏装置。本发明采用外支撑套、中支撑套和内支撑杆相互配合,实现夹持和切割;采用带有收纳凹槽与切割刀片配合,防止切割刀片误伤人体组织,提高本装置的安全性;采用采用防漏滑套和由弹性较大的材料制成的弹性密封套,用于堵住开口,在一定范围内可能随着开口的大小弹性变化,既能避免防漏滑套与开口

一种用于腹腔镜手术的抓钳.pdf
本发明公开了一种用于腹腔镜手术的抓钳,包括外支撑套和设置在外支撑套内部的中支撑套,所述外支撑套顶端设置有下夹持板并且其下端与带有上夹持板的中支撑套螺纹连接,所述中支撑套下端螺纹连接有带有切割刀片的内支撑杆;所述外支撑套外围还设置有防漏装置。本发明采用外支撑套、中支撑套和内支撑杆相互配合,实现夹持和切割;采用带有收纳凹槽与切割刀片配合,防止切割刀片误伤人体组织,提高本装置的安全性;采用采用防漏滑套和由弹性较大的材料制成的弹性密封套,用于堵住开口,在一定范围内可能随着开口的大小弹性变化,既能避免防漏滑套与开口
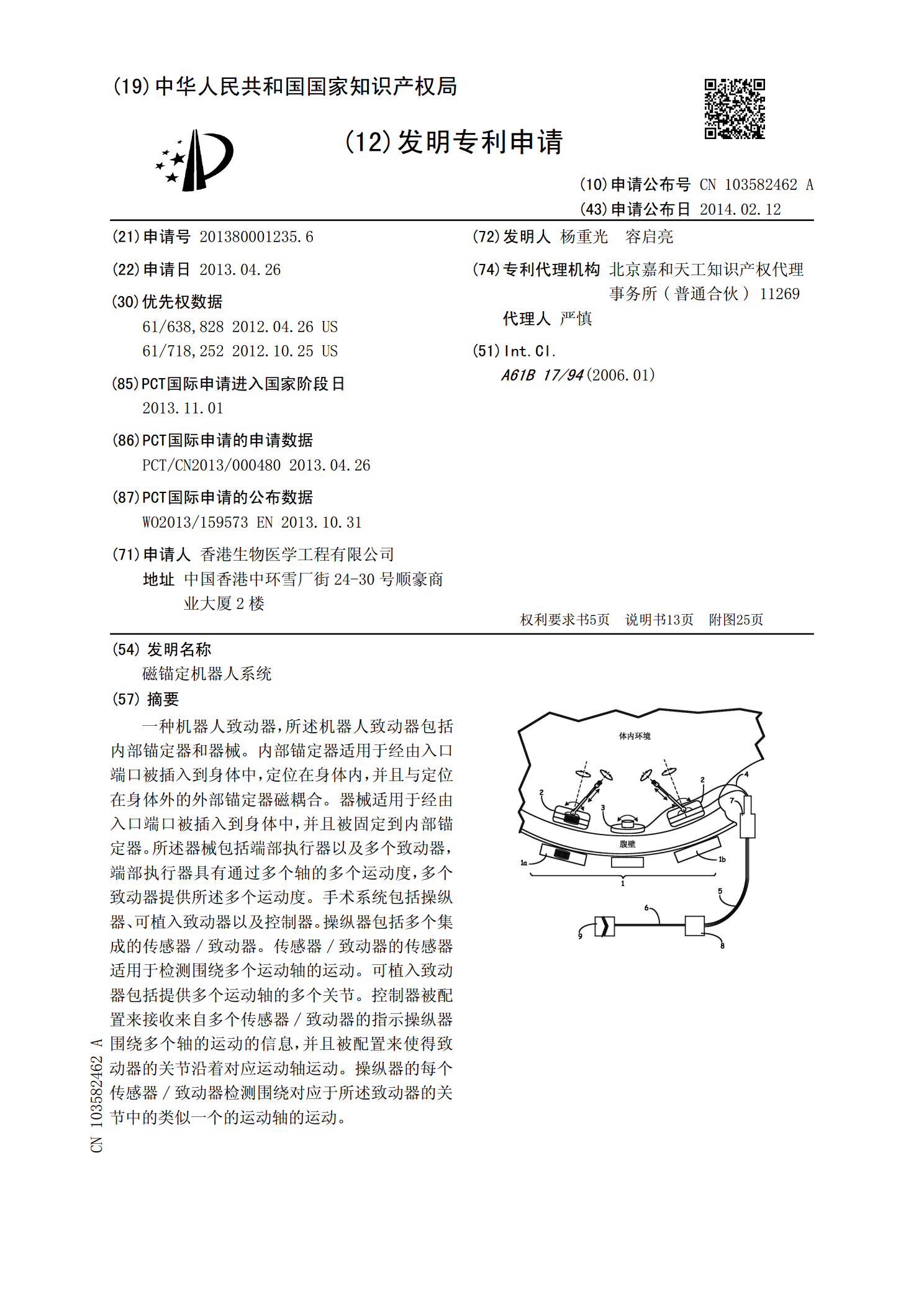
磁锚定机器人系统.pdf
一种机器人致动器,所述机器人致动器包括内部锚定器和器械。内部锚定器适用于经由入口端口被插入到身体中,定位在身体内,并且与定位在身体外的外部锚定器磁耦合。器械适用于经由入口端口被插入到身体中,并且被固定到内部锚定器。所述器械包括端部执行器以及多个致动器,端部执行器具有通过多个轴的多个运动度,多个致动器提供所述多个运动度。手术系统包括操纵器、可植入致动器以及控制器。操纵器包括多个集成的传感器/致动器。传感器/致动器的传感器适用于检测围绕多个运动轴的运动。可植入致动器包括提供多个运动轴的多个关节。控制器被配置来