
一种极限工况的智能汽车轨迹跟踪控制方法.pdf

论文****酱吖

1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种极限工况的智能汽车轨迹跟踪控制方法.pdf
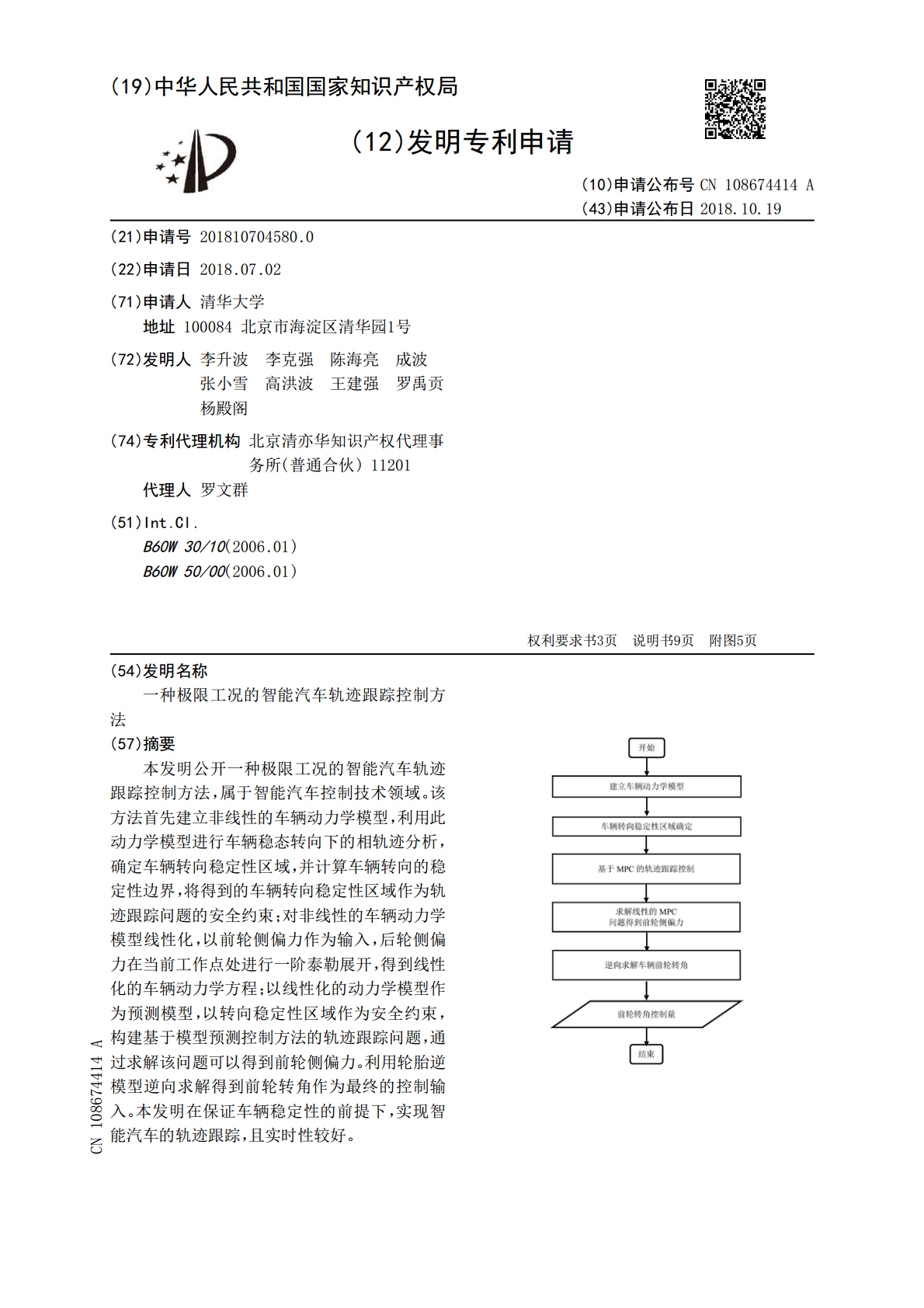
本发明公开一种极限工况的智能汽车轨迹跟踪控制方法,属于智能汽车控制技术领域。该方法首先建立非线性的车辆动力学模型,利用此动力学模型进行车辆稳态转向下的相轨迹分析,确定车辆转向稳定性区域,并计算车辆转向的稳定性边界,将得到的车辆转向稳定性区域作为轨迹跟踪问题的安全约束;对非线性的车辆动力学模型线性化,以前轮侧偏力作为输入,后轮侧偏力在当前工作点处进行一阶泰勒展开,得到线性化的车辆动力学方程;以线性化的动力学模型作为预测模型,以转向稳定性区域作为安全约束,构建基于模型预测控制方法的轨迹跟踪问题,通过求解该问题
一种智能汽车极限工况下路径跟踪与稳定控制方法.pdf
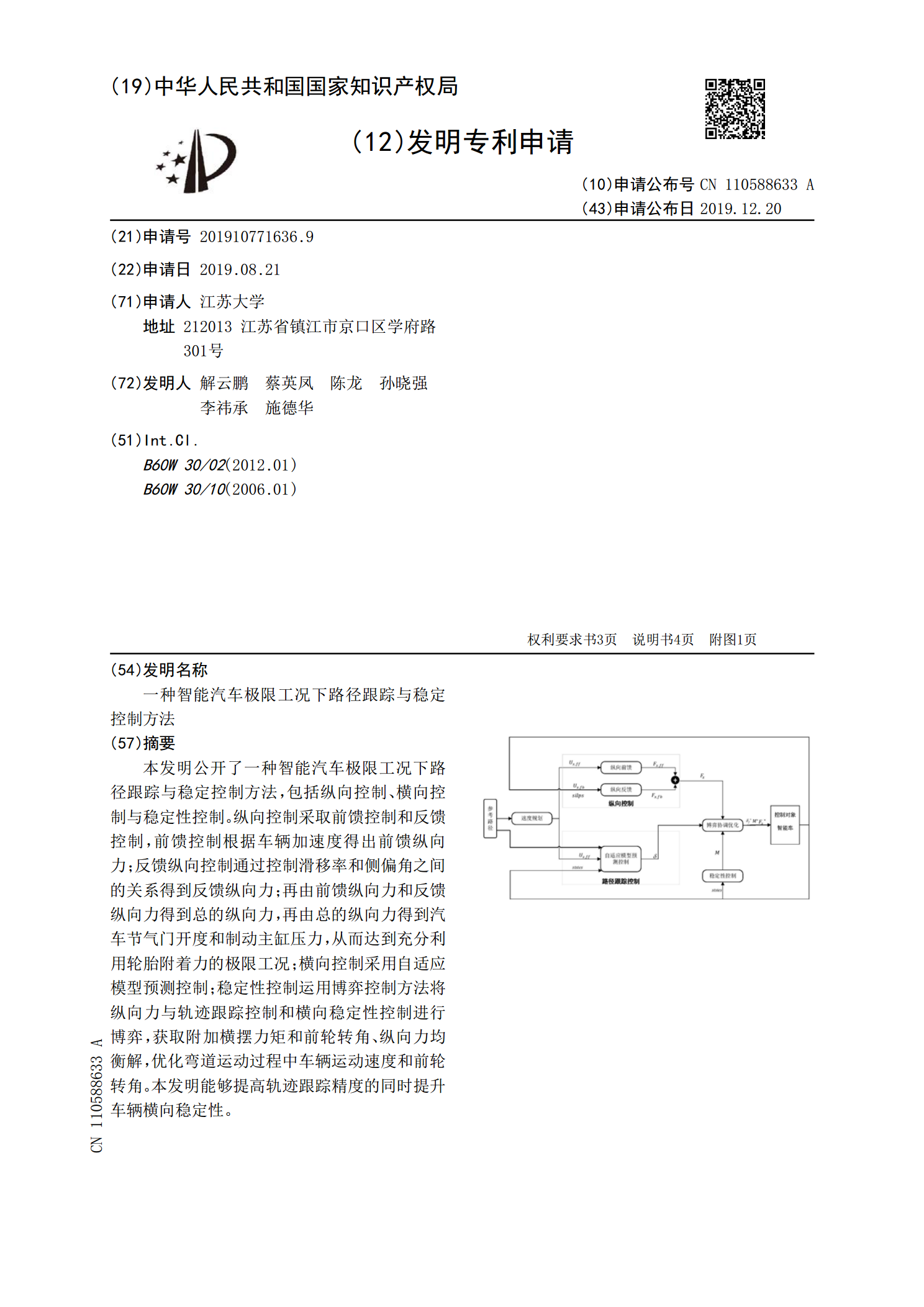
本发明公开了一种智能汽车极限工况下路径跟踪与稳定控制方法,包括纵向控制、横向控制与稳定性控制。纵向控制采取前馈控制和反馈控制,前馈控制根据车辆加速度得出前馈纵向力;反馈纵向控制通过控制滑移率和侧偏角之间的关系得到反馈纵向力;再由前馈纵向力和反馈纵向力得到总的纵向力,再由总的纵向力得到汽车节气门开度和制动主缸压力,从而达到充分利用轮胎附着力的极限工况;横向控制采用自适应模型预测控制;稳定性控制运用博弈控制方法将纵向力与轨迹跟踪控制和横向稳定性控制进行博弈,获取附加横摆力矩和前轮转角、纵向力均衡解,优化弯道运

一种基于主动安全的智能汽车轨迹跟踪控制系统及控制方法.pdf
本发明公开了一种基于主动安全的智能汽车轨迹跟踪控制系统及控制方法,属于智能车辆自动驾驶领域。控制系统包括基于模型预测控制的轨迹跟踪控制单元和具有主动安全功能的线控转向单元,轨迹跟踪控制单元可实时获取车辆的精确位置与方向盘转角,从而获取车辆的姿态信息;结合目标轨迹参数计算出车辆的目标前轮转角,线控转向控制单元根据该目标前轮转角,实现对转向执行电机的精确控制;同时对车辆可能出现的侧翻危险进行预测,并进行主动前轮转角补偿控制,最终实现车辆的轨迹跟踪控制。本发明通过将模型预测控制理论与基于主动安全的线控转向技术相

基于模型预测控制的智能汽车轨迹跟踪方法比较.docx
基于模型预测控制的智能汽车轨迹跟踪方法比较基于模型预测控制的智能汽车轨迹跟踪方法比较摘要:随着智能汽车技术的发展,轨迹跟踪是智能汽车设计中的核心问题之一。本论文将介绍基于模型预测控制(MPC)的智能汽车轨迹跟踪方法,并与其他常见的轨迹跟踪方法进行比较。通过对不同方法的优点和局限性的分析,本文最终得出结论,模型预测控制是一种有效的智能汽车轨迹跟踪方法。1.引言智能汽车轨迹跟踪是指智能汽车根据给定的轨迹,通过调整车辆的控制参数来实现车辆在指定路径上的运动。轨迹跟踪方法的选择对于智能汽车的性能至关重要。传统的控
一种适用于高速极限工况的路径跟踪控制方法.pdf
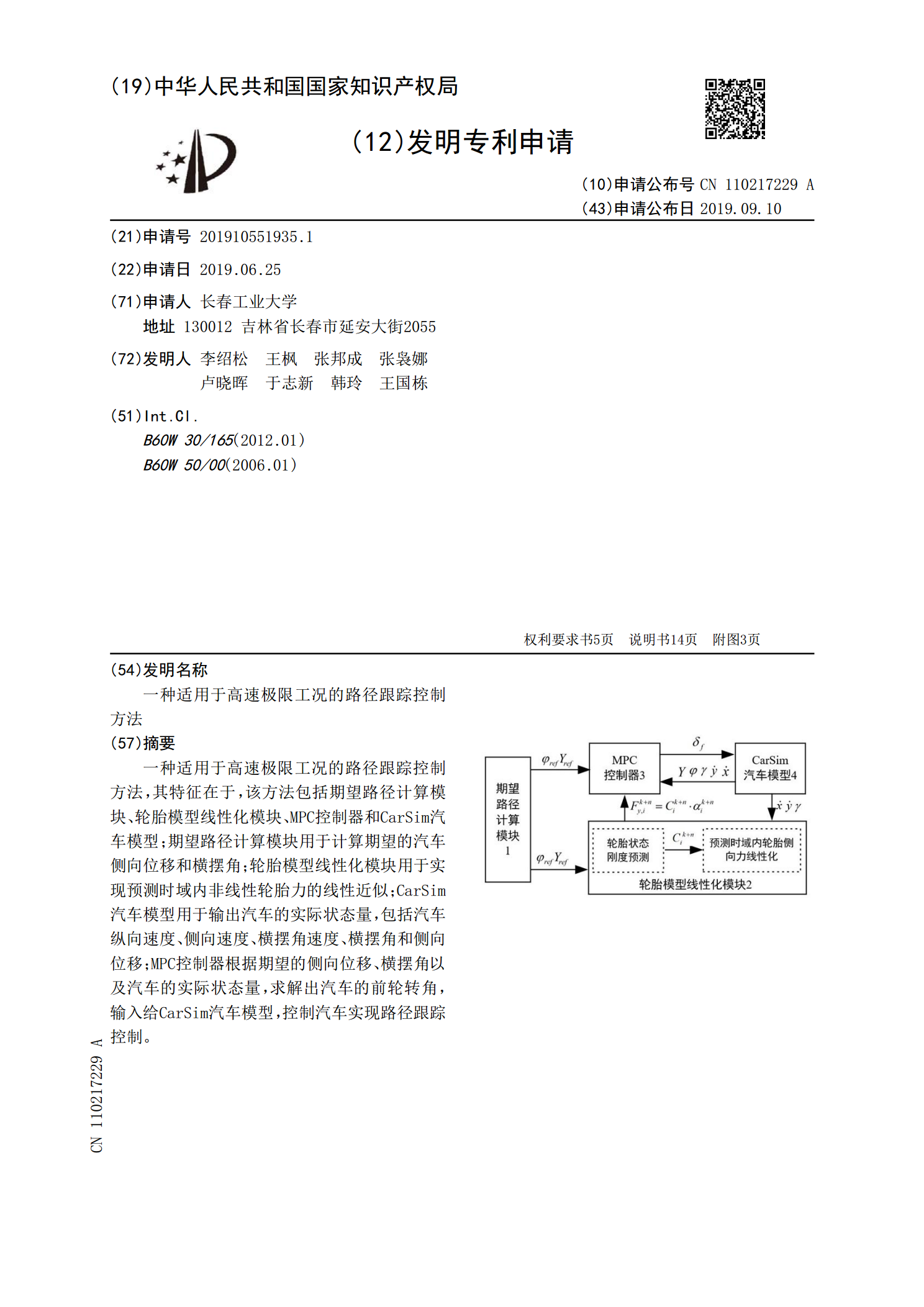
一种适用于高速极限工况的路径跟踪控制方法,其特征在于,该方法包括期望路径计算模块、轮胎模型线性化模块、MPC控制器和CarSim汽车模型;期望路径计算模块用于计算期望的汽车侧向位移和横摆角;轮胎模型线性化模块用于实现预测时域内非线性轮胎力的线性近似;CarSim汽车模型用于输出汽车的实际状态量,包括汽车纵向速度、侧向速度、横摆角速度、横摆角和侧向位移;MPC控制器根据期望的侧向位移、横摆角以及汽车的实际状态量,求解出汽车的前轮转角,输入给CarSim汽车模型,控制汽车实现路径跟踪控制。