
一种适用于高速极限工况的路径跟踪控制方法.pdf

依波****bc

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种适用于高速极限工况的路径跟踪控制方法.pdf
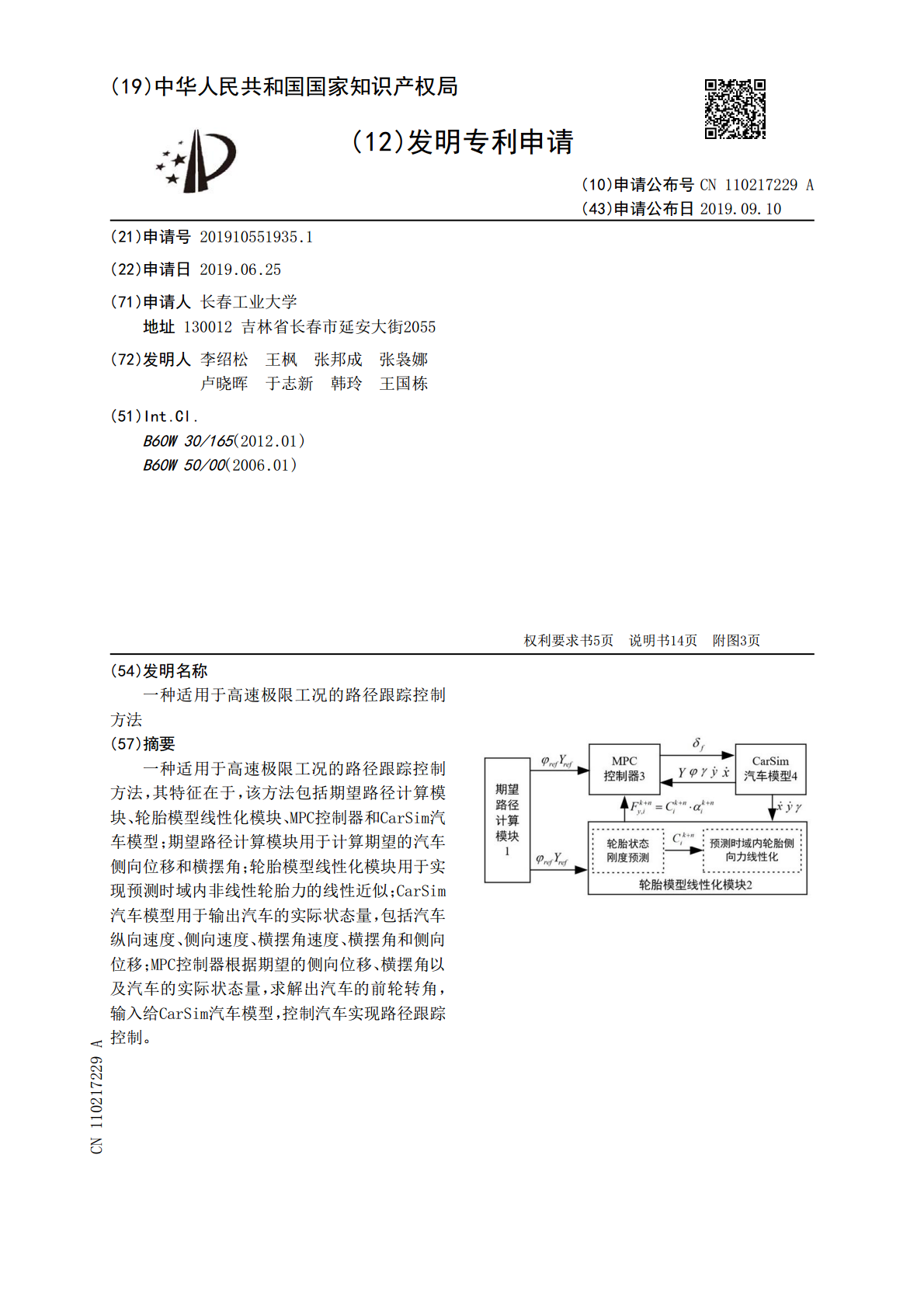
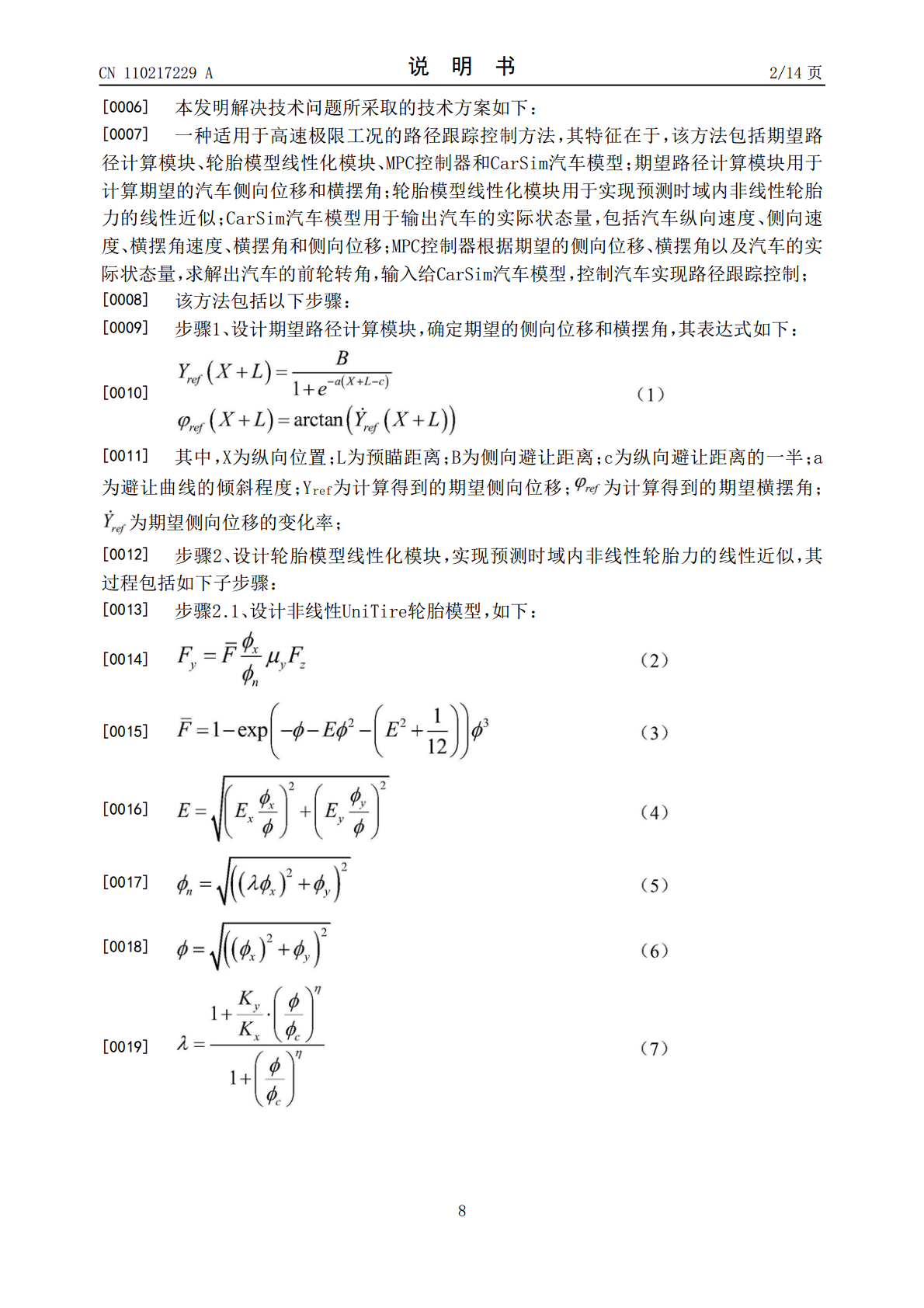
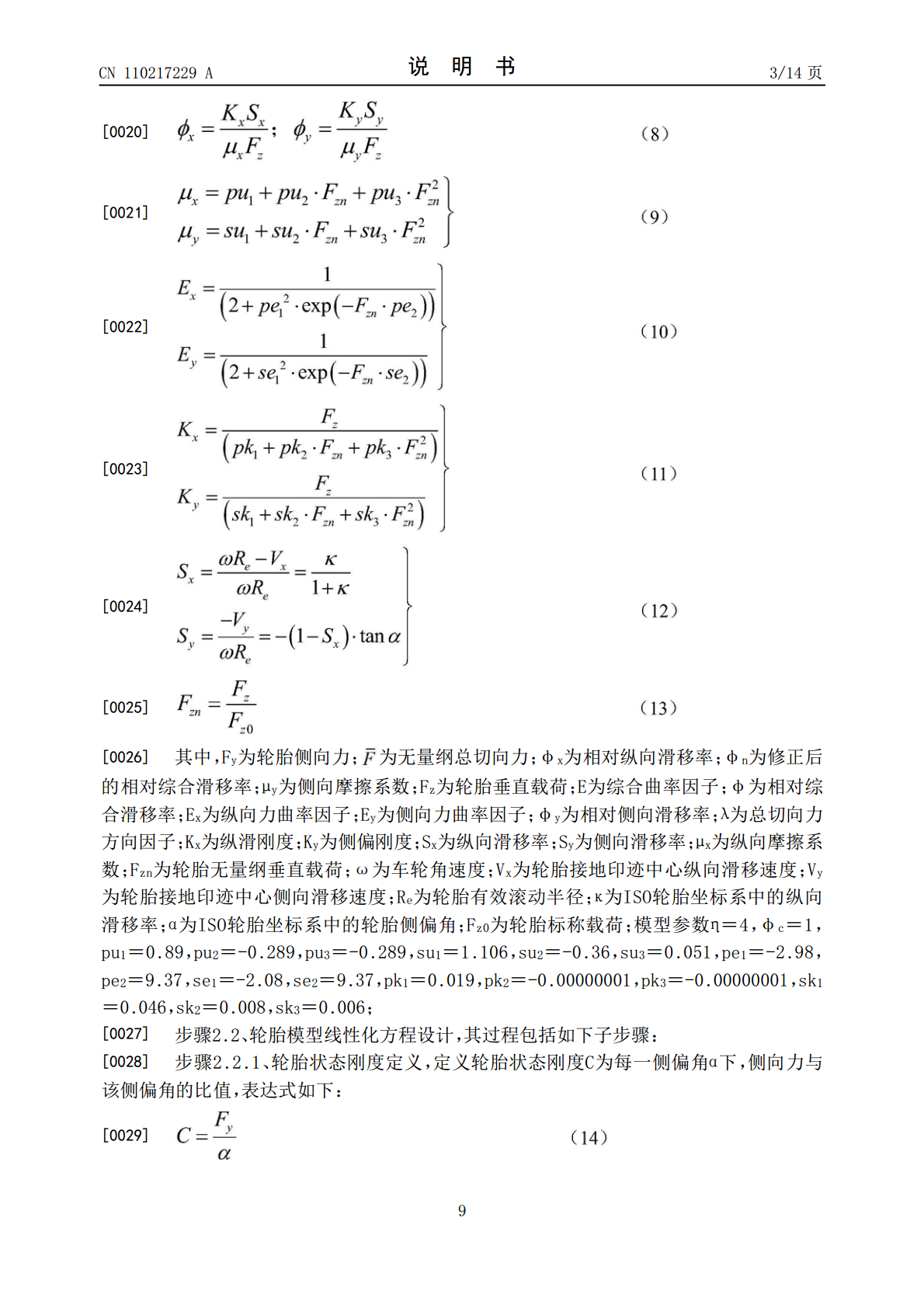
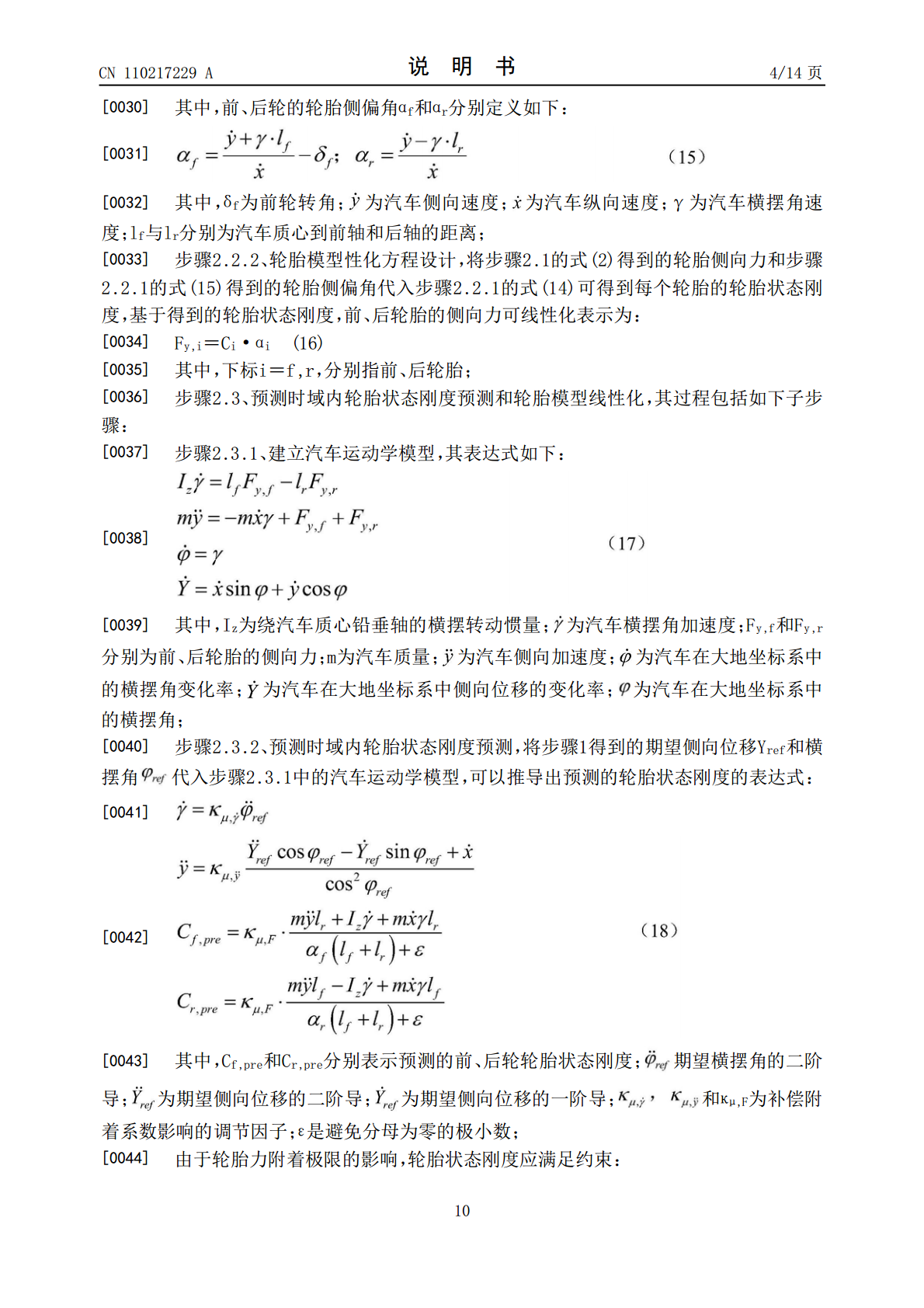
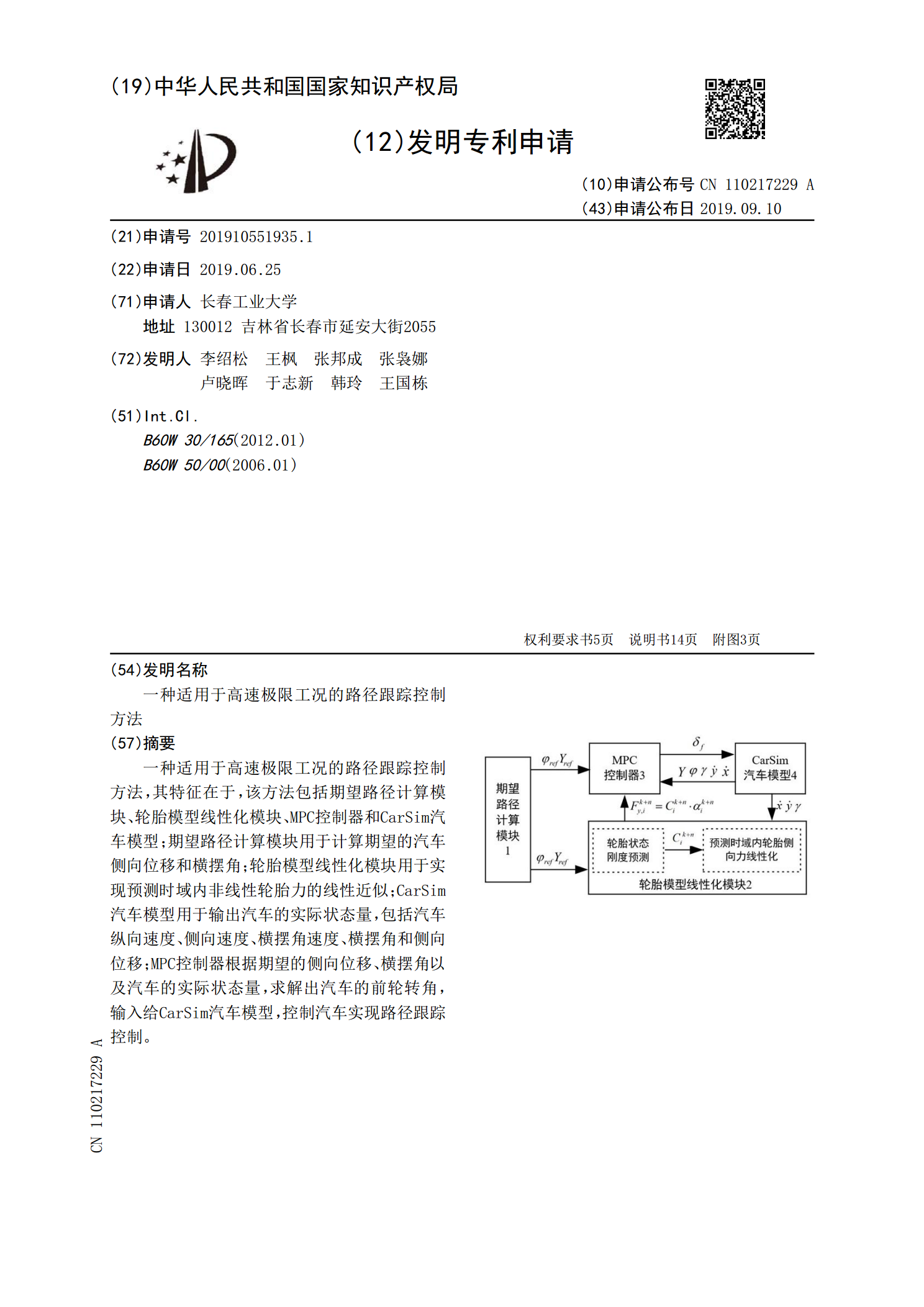
一种适用于高速极限工况的路径跟踪控制方法,其特征在于,该方法包括期望路径计算模块、轮胎模型线性化模块、MPC控制器和CarSim汽车模型;期望路径计算模块用于计算期望的汽车侧向位移和横摆角;轮胎模型线性化模块用于实现预测时域内非线性轮胎力的线性近似;CarSim汽车模型用于输出汽车的实际状态量,包括汽车纵向速度、侧向速度、横摆角速度、横摆角和侧向位移;MPC控制器根据期望的侧向位移、横摆角以及汽车的实际状态量,求解出汽车的前轮转角,输入给CarSim汽车模型,控制汽车实现路径跟踪控制。
一种智能汽车极限工况下路径跟踪与稳定控制方法.pdf
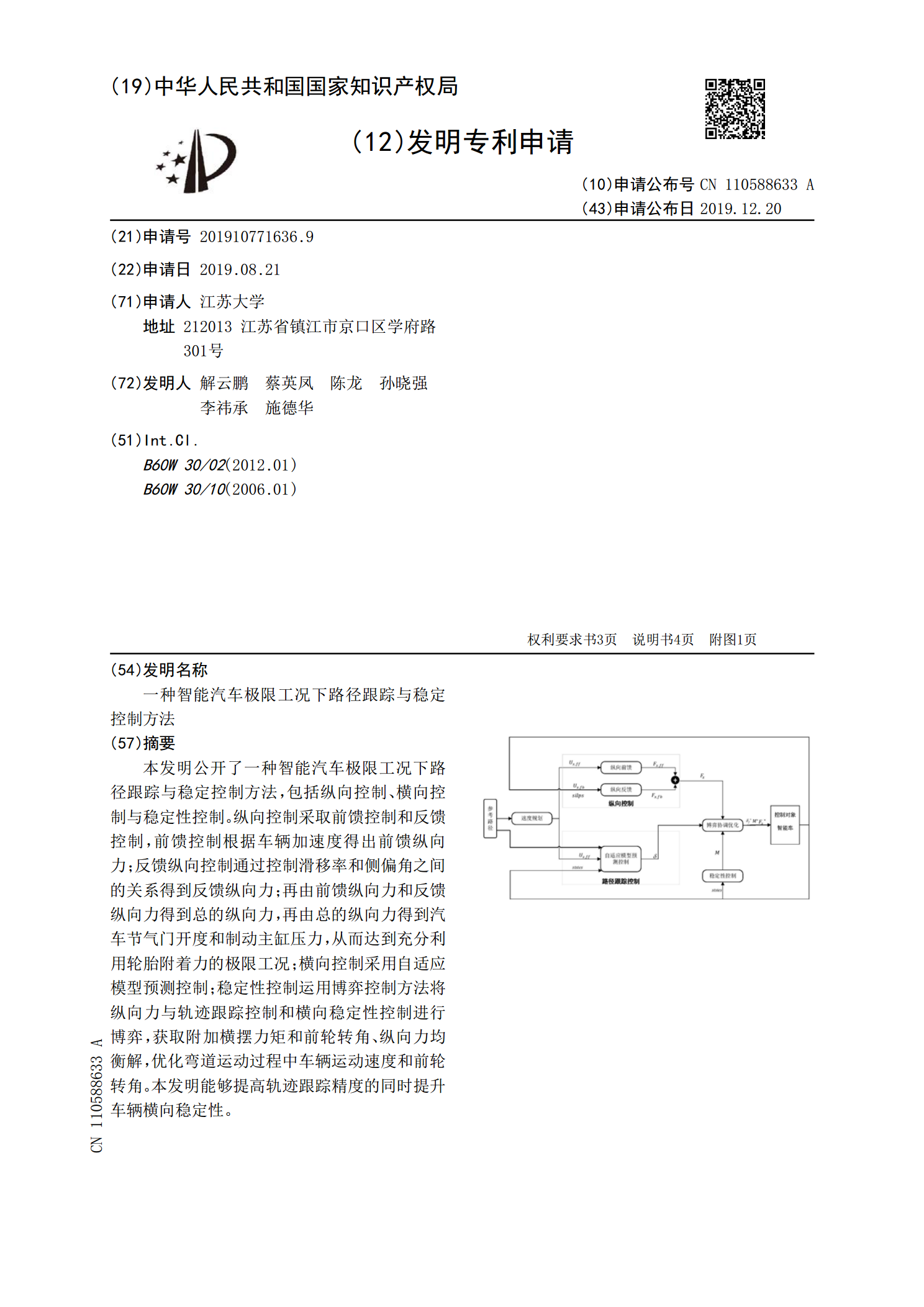
本发明公开了一种智能汽车极限工况下路径跟踪与稳定控制方法,包括纵向控制、横向控制与稳定性控制。纵向控制采取前馈控制和反馈控制,前馈控制根据车辆加速度得出前馈纵向力;反馈纵向控制通过控制滑移率和侧偏角之间的关系得到反馈纵向力;再由前馈纵向力和反馈纵向力得到总的纵向力,再由总的纵向力得到汽车节气门开度和制动主缸压力,从而达到充分利用轮胎附着力的极限工况;横向控制采用自适应模型预测控制;稳定性控制运用博弈控制方法将纵向力与轨迹跟踪控制和横向稳定性控制进行博弈,获取附加横摆力矩和前轮转角、纵向力均衡解,优化弯道运

一种极限工况的智能汽车轨迹跟踪控制方法.pdf
本发明公开一种极限工况的智能汽车轨迹跟踪控制方法,属于智能汽车控制技术领域。该方法首先建立非线性的车辆动力学模型,利用此动力学模型进行车辆稳态转向下的相轨迹分析,确定车辆转向稳定性区域,并计算车辆转向的稳定性边界,将得到的车辆转向稳定性区域作为轨迹跟踪问题的安全约束;对非线性的车辆动力学模型线性化,以前轮侧偏力作为输入,后轮侧偏力在当前工作点处进行一阶泰勒展开,得到线性化的车辆动力学方程;以线性化的动力学模型作为预测模型,以转向稳定性区域作为安全约束,构建基于模型预测控制方法的轨迹跟踪问题,通过求解该问题
一种基于改进EMPC的高速无人艇路径跟踪控制方法.pdf
本发明公开了一种基于改进EMPC的高速无人艇路径跟踪控制方法,包括如下步骤:步骤1:构建欠驱动水面高速无人艇的基础模型和坐标系;步骤2:在制导方法中,结合当前船速通过动态视线法对LOS前视园半径进行优化,在优化后的LOS前视园半径基础上结合横侧偏差率获取期望航向角;步骤3:在EMPC控制器离线状态中,通过白鹭群优化算法,对离线状态下的各个状态分区进行最优控制律求解,得到各个状态分区及对应分区上的线性控制律;步骤4:在EMPC控制器在线状态中,通过可达分区查找法查找步骤3中获得的对应分区上的线性控制律,控制
一种路径跟踪控制方法及设备.pdf
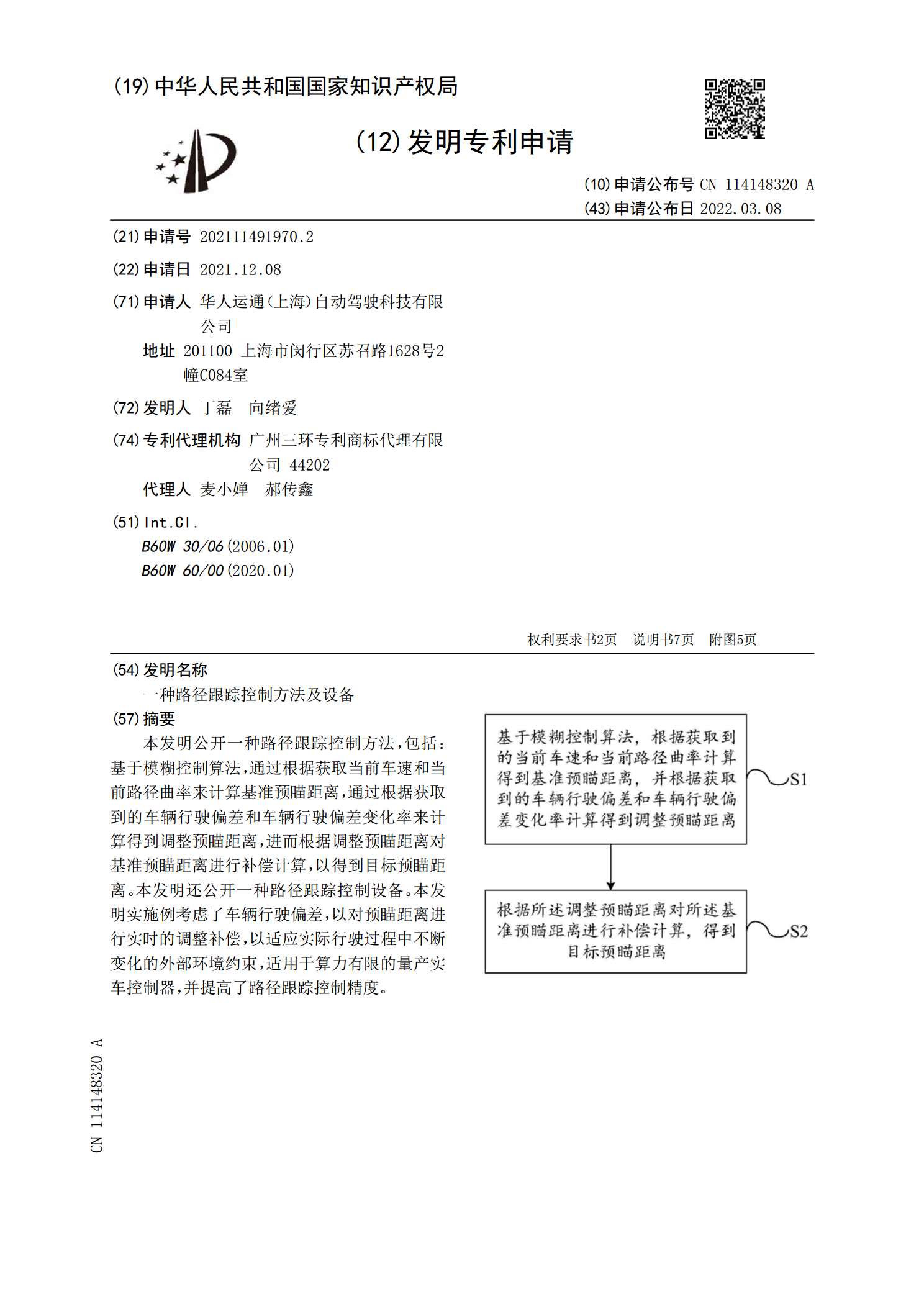
本发明公开一种路径跟踪控制方法,包括:基于模糊控制算法,通过根据获取当前车速和当前路径曲率来计算基准预瞄距离,通过根据获取到的车辆行驶偏差和车辆行驶偏差变化率来计算得到调整预瞄距离,进而根据调整预瞄距离对基准预瞄距离进行补偿计算,以得到目标预瞄距离。本发明还公开一种路径跟踪控制设备。本发明实施例考虑了车辆行驶偏差,以对预瞄距离进行实时的调整补偿,以适应实际行驶过程中不断变化的外部环境约束,适用于算力有限的量产实车控制器,并提高了路径跟踪控制精度。