
一种齿轮齿条驱动式抓取机械手.pdf

一只****呀9


1/6

2/6
3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种齿轮齿条驱动式抓取机械手.pdf
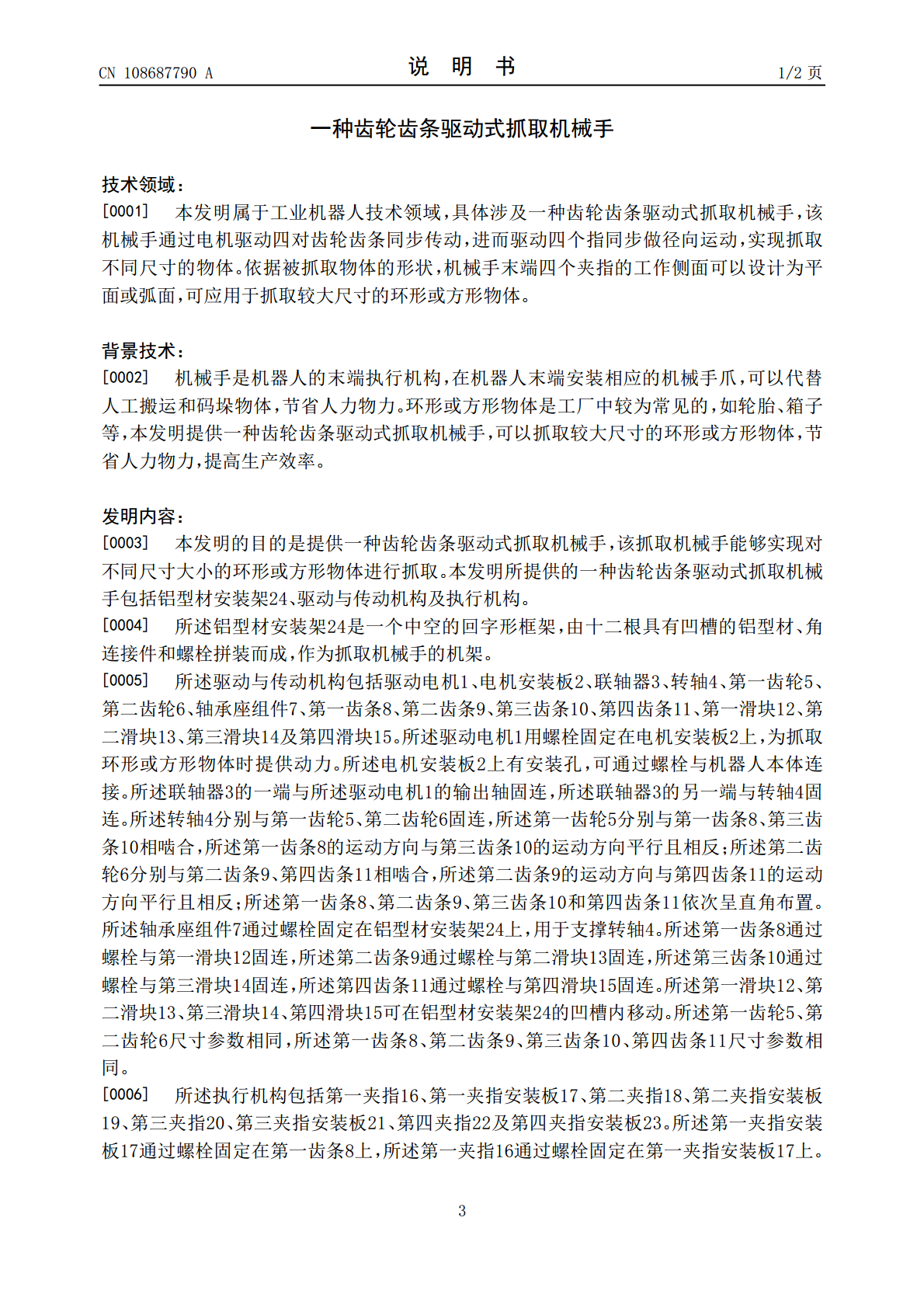
本发明公开一种齿轮齿条驱动式抓取机械手,属于工业机器人技术领域。该抓取机械手包括驱动电机、电机安装板、联轴器、转轴、第一齿轮、第二齿轮、轴承座组件、第一齿条、第二齿条、第三齿条、第四齿条、第一滑块、第二滑块、第三滑块、第四滑块、第一夹指、第一夹指安装板、第二夹指、第二夹指安装板、第三夹指、第三夹指安装板、第四夹指、第四夹指安装板及铝型材安装架。其工作原理是:当驱动电机转动时,通过联轴器传递动力给转轴,转轴带动第一齿轮和第二齿轮同时转动,第一齿轮带动第一齿条和第三齿条做直线运动,第二齿轮带动第二齿条和第四齿

齿轮齿条式机械手.pdf
一种齿轮齿条式机械手,包括左齿轮箱(1)和右齿轮箱(2),所述左齿轮箱内装有齿轮(8),所述右齿轮箱内装有与所述齿轮相联的活动转接块(9),该活动转接块上装有导杆(11),导杆的下端通过其两边的连杆(13)各装有拨杆(14),所述拨杆的下端装有推杆(19),所述推杆的夹持端装有夹具(20);所述齿轮与左齿条(10)相连接。本发明采用机械式(齿轮齿条带动、齿轮活动转接块传动、杠杆式连杆拨杆带动)运动,能推动推杆使夹具夹持住工件,还能使推杆旋转而将工件旋转一定的角度,其结构简单、动作灵敏可靠,在制作上又快、成

齿轮齿条驱动式冲压装置.pdf
本发明公开了一种齿轮齿条驱动式冲压装置,包括矩形底板、动力箱以及推杆,还包括用于冲压工件的冲压头一和冲压头二;所述动力箱的动力输出轴上固定安装有齿轮,所述齿轮与齿条相互啮合构成齿轮齿条传动副,所述齿条固定安装在所述推杆下侧,所述推杆滑动安装在支板一和支板二上,所述支板一和所述支板二均通过螺钉固定安装在所述矩形底板上侧,所述推杆前端分别与连杆一的一端和连杆二的一端转动连接,所述连杆一的另一端与所述冲压头一转动连接,所述连杆二的另一端与所述冲压头二转动连接。本发明具有以下特点:设计合理,操作方便,自动化程度高
均衡驱动齿轮齿条式电梯.pdf
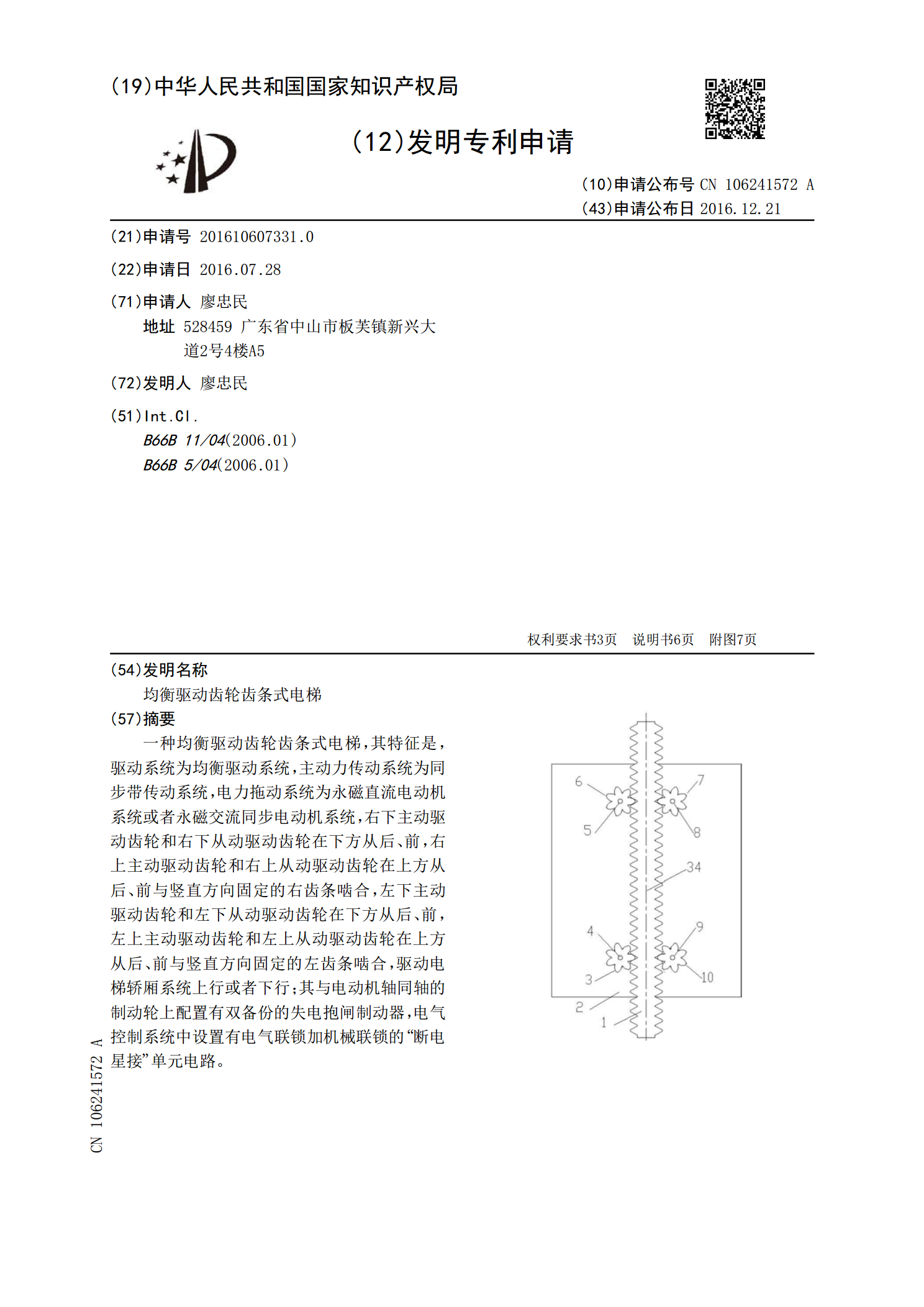
一种均衡驱动齿轮齿条式电梯,其特征是,驱动系统为均衡驱动系统,主动力传动系统为同步带传动系统,电力拖动系统为永磁直流电动机系统或者永磁交流同步电动机系统,右下主动驱动齿轮和右下从动驱动齿轮在下方从后、前,右上主动驱动齿轮和右上从动驱动齿轮在上方从后、前与竖直方向固定的右齿条啮合,左下主动驱动齿轮和左下从动驱动齿轮在下方从后、前,左上主动驱动齿轮和左上从动驱动齿轮在上方从后、前与竖直方向固定的左齿条啮合,驱动电梯轿厢系统上行或者下行;其与电动机轴同轴的制动轮上配置有双备份的失电抱闸制动器,电气控制系统中设置
对称驱动齿轮齿条式电梯.pdf
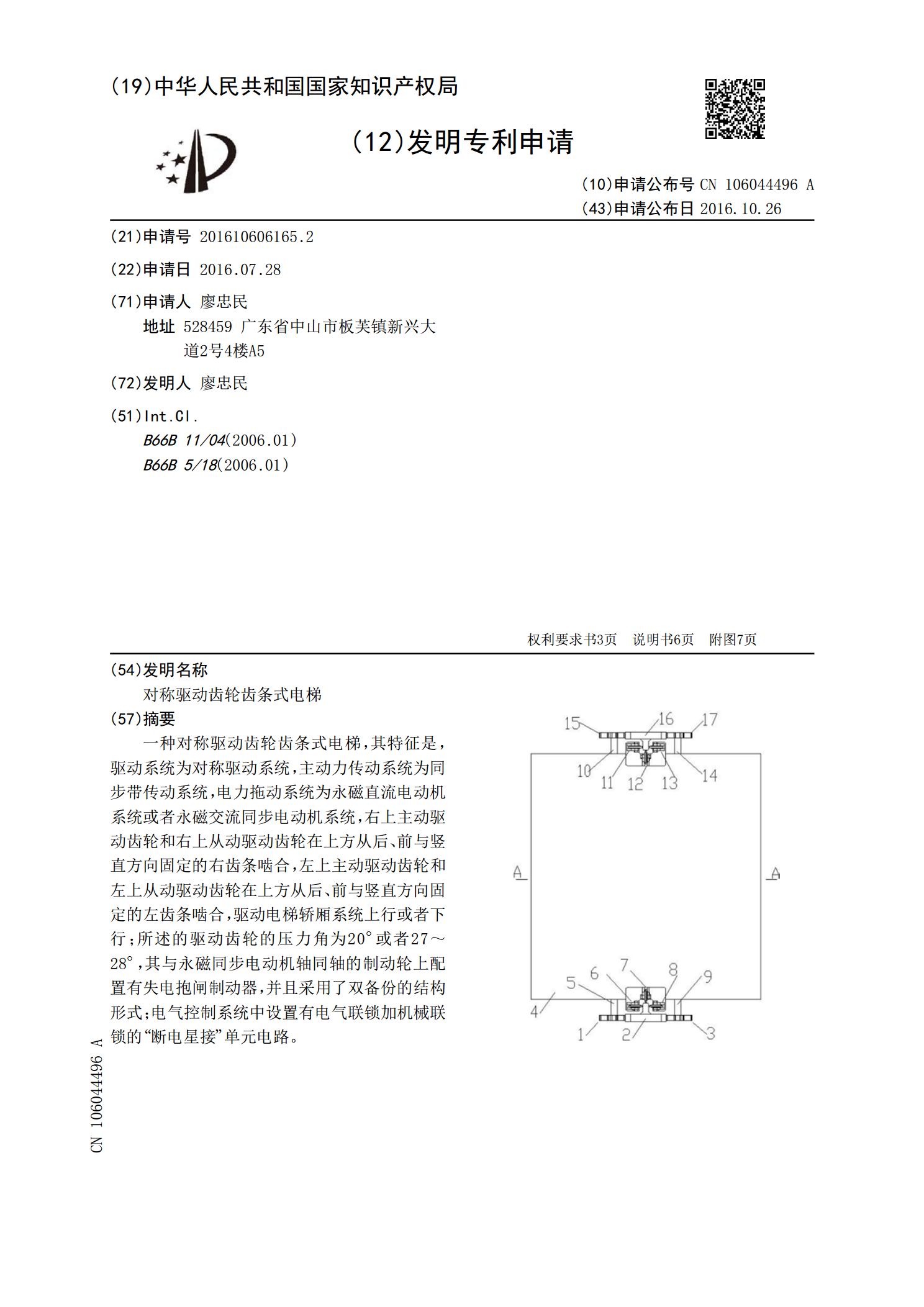
一种对称驱动齿轮齿条式电梯,其特征是,驱动系统为对称驱动系统,主动力传动系统为同步带传动系统,电力拖动系统为永磁直流电动机系统或者永磁交流同步电动机系统,右上主动驱动齿轮和右上从动驱动齿轮在上方从后、前与竖直方向固定的右齿条啮合,左上主动驱动齿轮和左上从动驱动齿轮在上方从后、前与竖直方向固定的左齿条啮合,驱动电梯轿厢系统上行或者下行;所述的驱动齿轮的压力角为20°或者27~28°,其与永磁同步电动机轴同轴的制动轮上配置有失电抱闸制动器,并且采用了双备份的结构形式;电气控制系统中设置有电气联锁加机械联锁的“