
一种机器人用自动感应制动装置及其使用方法.pdf

Jo****34


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种机器人用自动感应制动装置及其使用方法.pdf
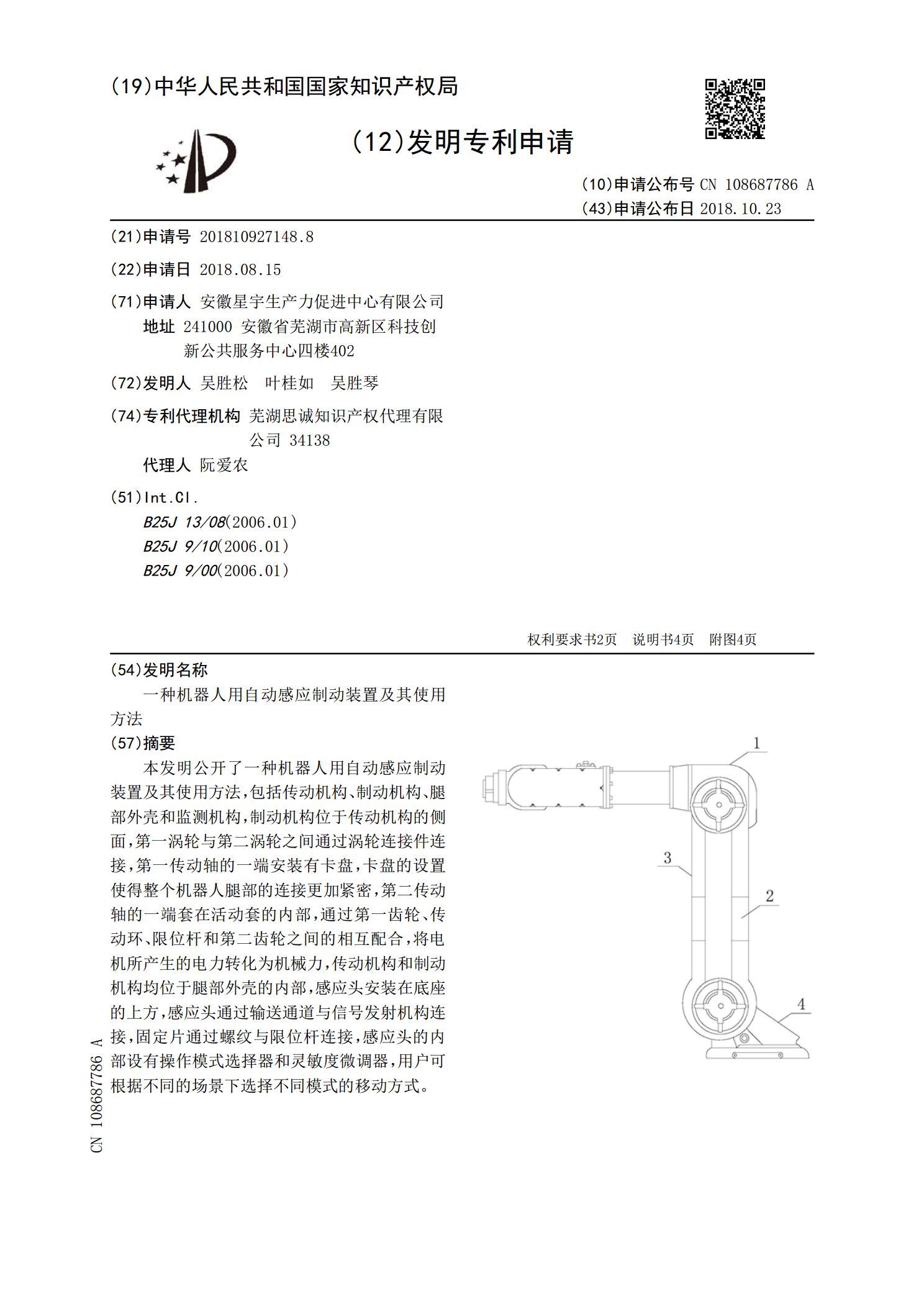
本发明公开了一种机器人用自动感应制动装置及其使用方法,包括传动机构、制动机构、腿部外壳和监测机构,制动机构位于传动机构的侧面,第一涡轮与第二涡轮之间通过涡轮连接件连接,第一传动轴的一端安装有卡盘,卡盘的设置使得整个机器人腿部的连接更加紧密,第二传动轴的一端套在活动套的内部,通过第一齿轮、传动环、限位杆和第二齿轮之间的相互配合,将电机所产生的电力转化为机械力,传动机构和制动机构均位于腿部外壳的内部,感应头安装在底座的上方,感应头通过输送通道与信号发射机构连接,固定片通过螺纹与限位杆连接,感应头的内部设有操作
一种感应炉用钢锭脱模装置及其使用方法.pdf
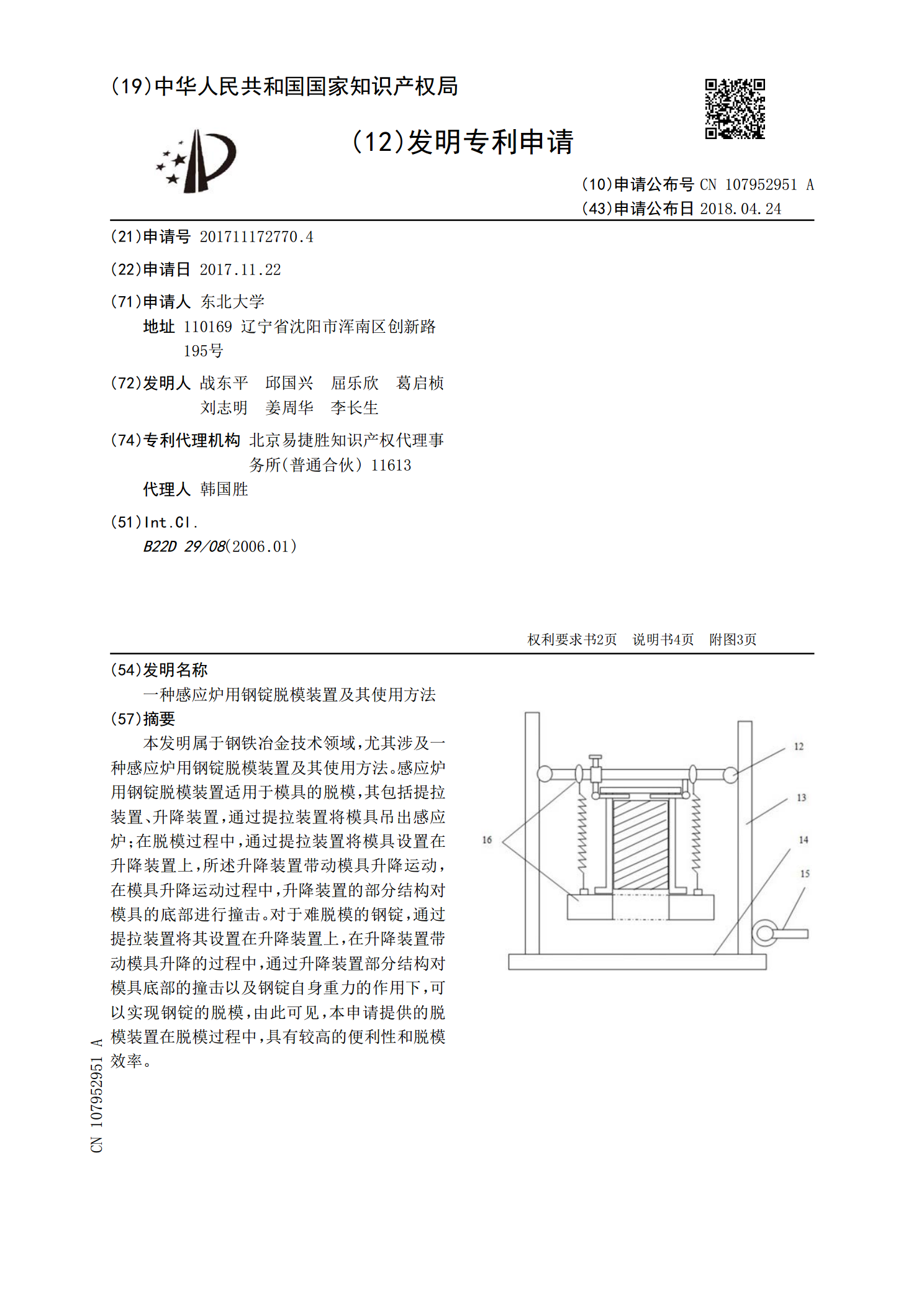
本发明属于钢铁冶金技术领域,尤其涉及一种感应炉用钢锭脱模装置及其使用方法。感应炉用钢锭脱模装置适用于模具的脱模,其包括提拉装置、升降装置,通过提拉装置将模具吊出感应炉;在脱模过程中,通过提拉装置将模具设置在升降装置上,所述升降装置带动模具升降运动,在模具升降运动过程中,升降装置的部分结构对模具的底部进行撞击。对于难脱模的钢锭,通过提拉装置将其设置在升降装置上,在升降装置带动模具升降的过程中,通过升降装置部分结构对模具底部的撞击以及钢锭自身重力的作用下,可以实现钢锭的脱模,由此可见,本申请提供的脱模装置在脱
一种真空感应钎焊装置及其使用方法.pdf
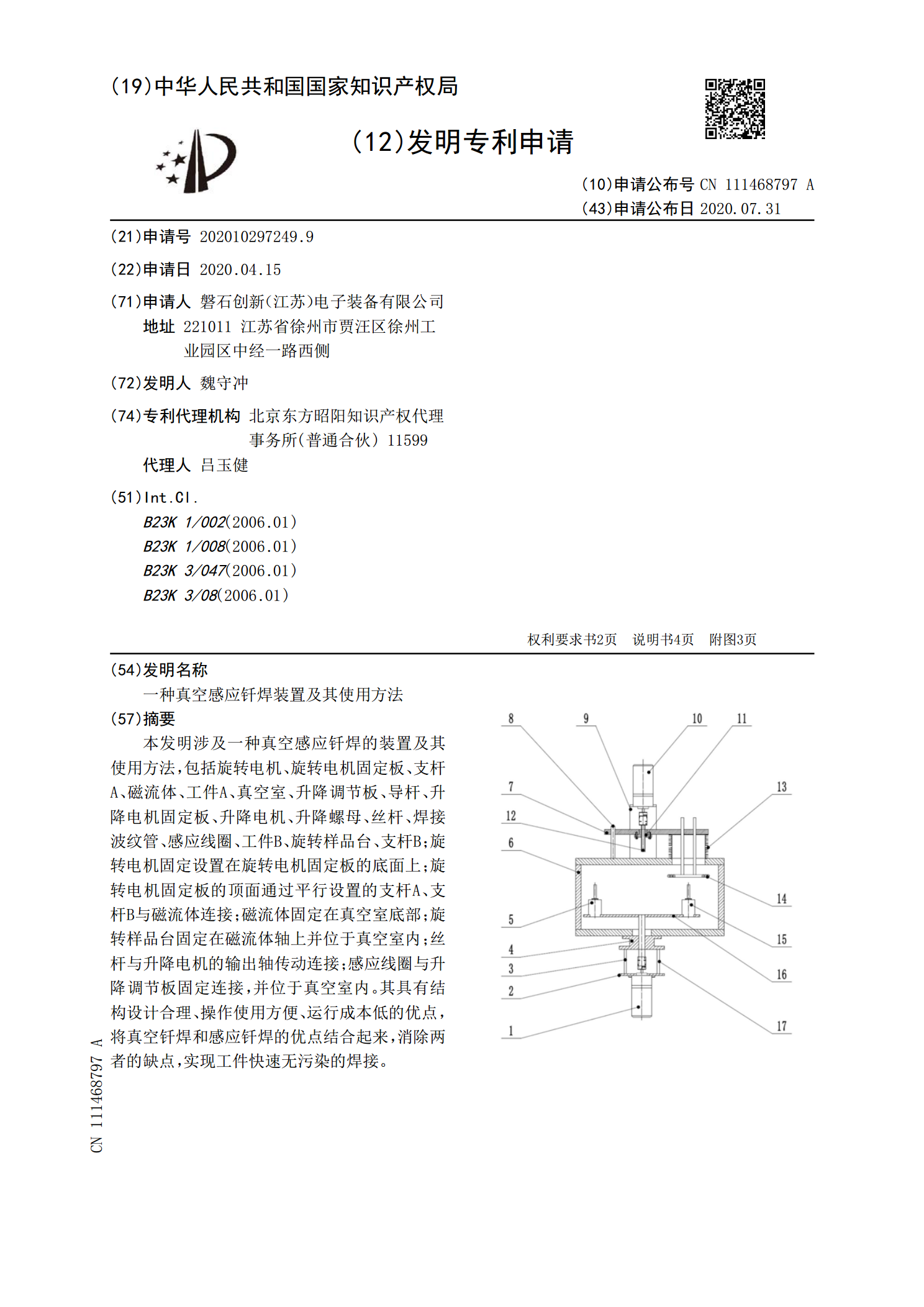
本发明涉及一种真空感应钎焊的装置及其使用方法,包括旋转电机、旋转电机固定板、支杆A、磁流体、工件A、真空室、升降调节板、导杆、升降电机固定板、升降电机、升降螺母、丝杆、焊接波纹管、感应线圈、工件B、旋转样品台、支杆B;旋转电机固定设置在旋转电机固定板的底面上;旋转电机固定板的顶面通过平行设置的支杆A、支杆B与磁流体连接;磁流体固定在真空室底部;旋转样品台固定在磁流体轴上并位于真空室内;丝杆与升降电机的输出轴传动连接;感应线圈与升降调节板固定连接,并位于真空室内。其具有结构设计合理、操作使用方便、运行成本低

一种AGV机器人用夹取装置及其使用方法.pdf
本发明涉及AGV机器人技术领域,尤其为一种AGV机器人用夹取装置及其使用方法,包括AGV机器人、监控装置、夹取装置和定位装置,所述AGV机器人左端固定连接有监控装置,所述AGV机器人顶端从左至右依次固定连接有控制器、定位装置和机械臂,所述机械臂顶端固定连接有夹取装置,所述夹取装置包括第一电动伸缩杆,所述机械臂顶端固定连接有第一电动伸缩杆,本发明中,通过设置的固定架和压力传感器,这种设置配合转动杆与支撑杆的转动连接、支撑杆与夹爪的固定连接、第一弹簧对压板及固定架的弹力和压板与压力传感器的固定连接,在使用装置
一种电动车辆用自动换挡装置及其使用方法.pdf
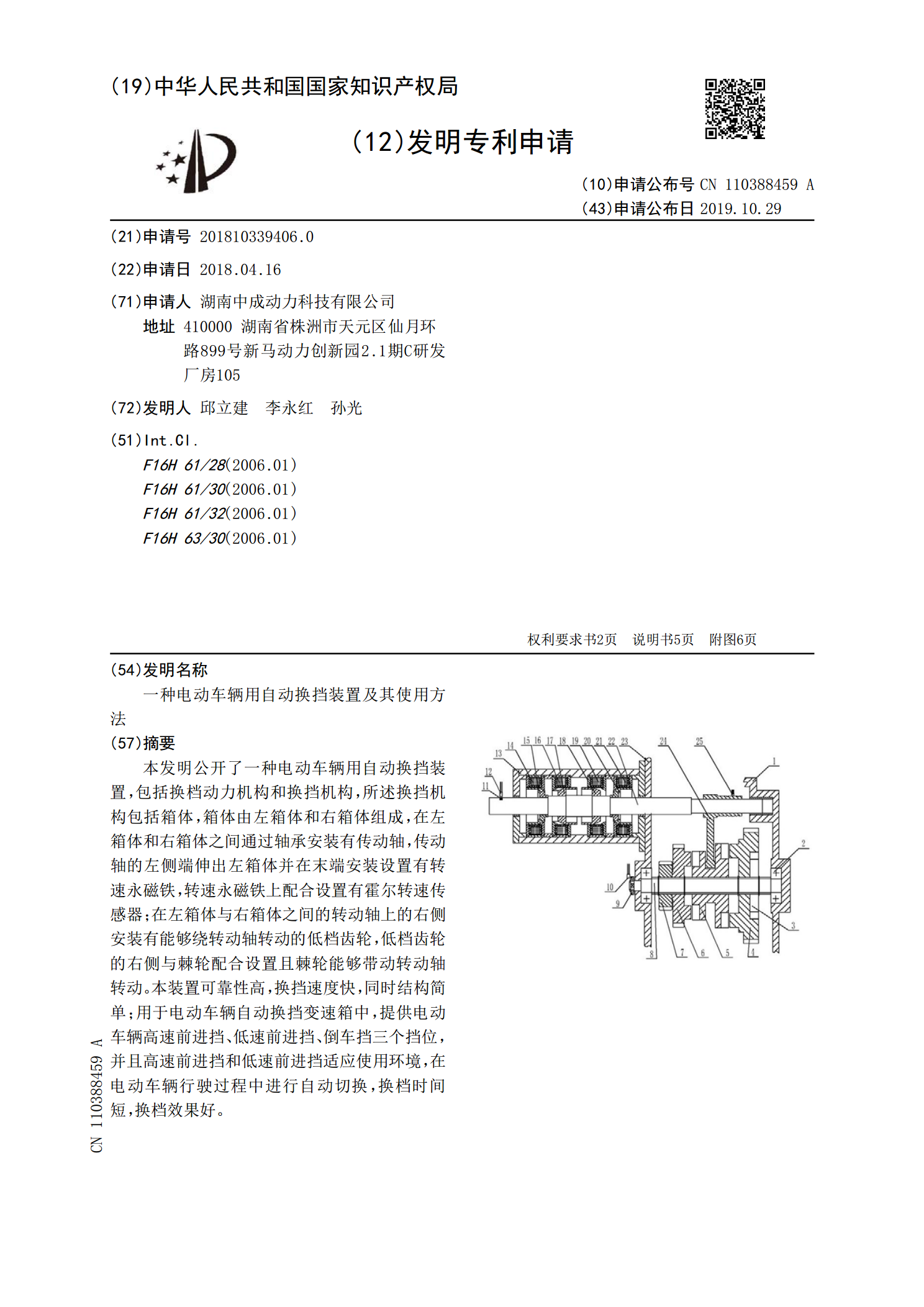
本发明公开了一种电动车辆用自动换挡装置,包括换档动力机构和换挡机构,所述换挡机构包括箱体,箱体由左箱体和右箱体组成,在左箱体和右箱体之间通过轴承安装有传动轴,传动轴的左侧端伸出左箱体并在末端安装设置有转速永磁铁,转速永磁铁上配合设置有霍尔转速传感器;在左箱体与右箱体之间的转动轴上的右侧安装有能够绕转动轴转动的低档齿轮,低档齿轮的右侧与棘轮配合设置且棘轮能够带动转动轴转动。本装置可靠性高,换挡速度快,同时结构简单;用于电动车辆自动换挡变速箱中,提供电动车辆高速前进挡、低速前进挡、倒车挡三个挡位,并且高速前进