
轨道车辆齿轮箱箱体修复设备及修复方法.pdf

骊英****bb

1/9

2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轨道车辆齿轮箱箱体修复设备及修复方法.pdf
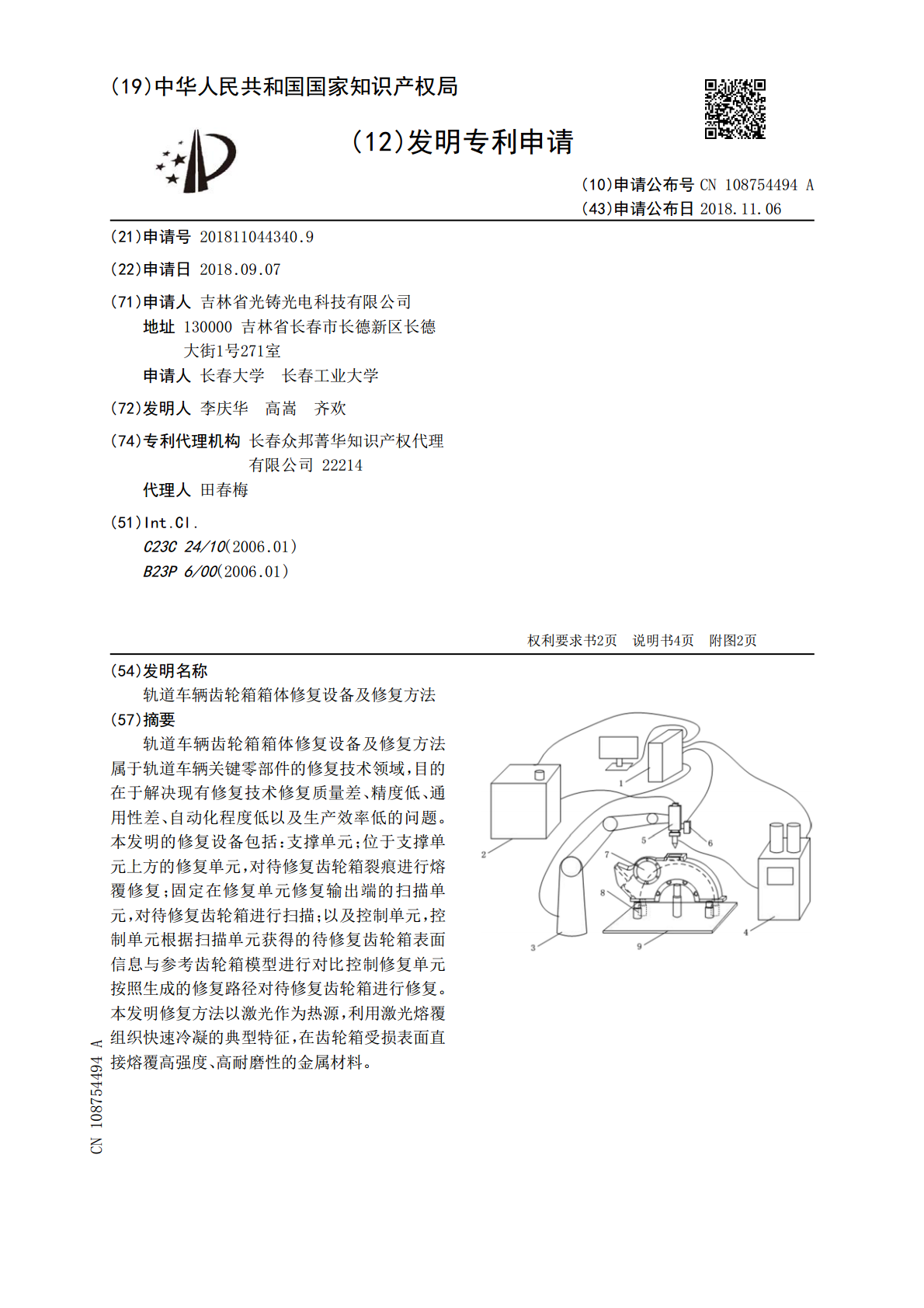
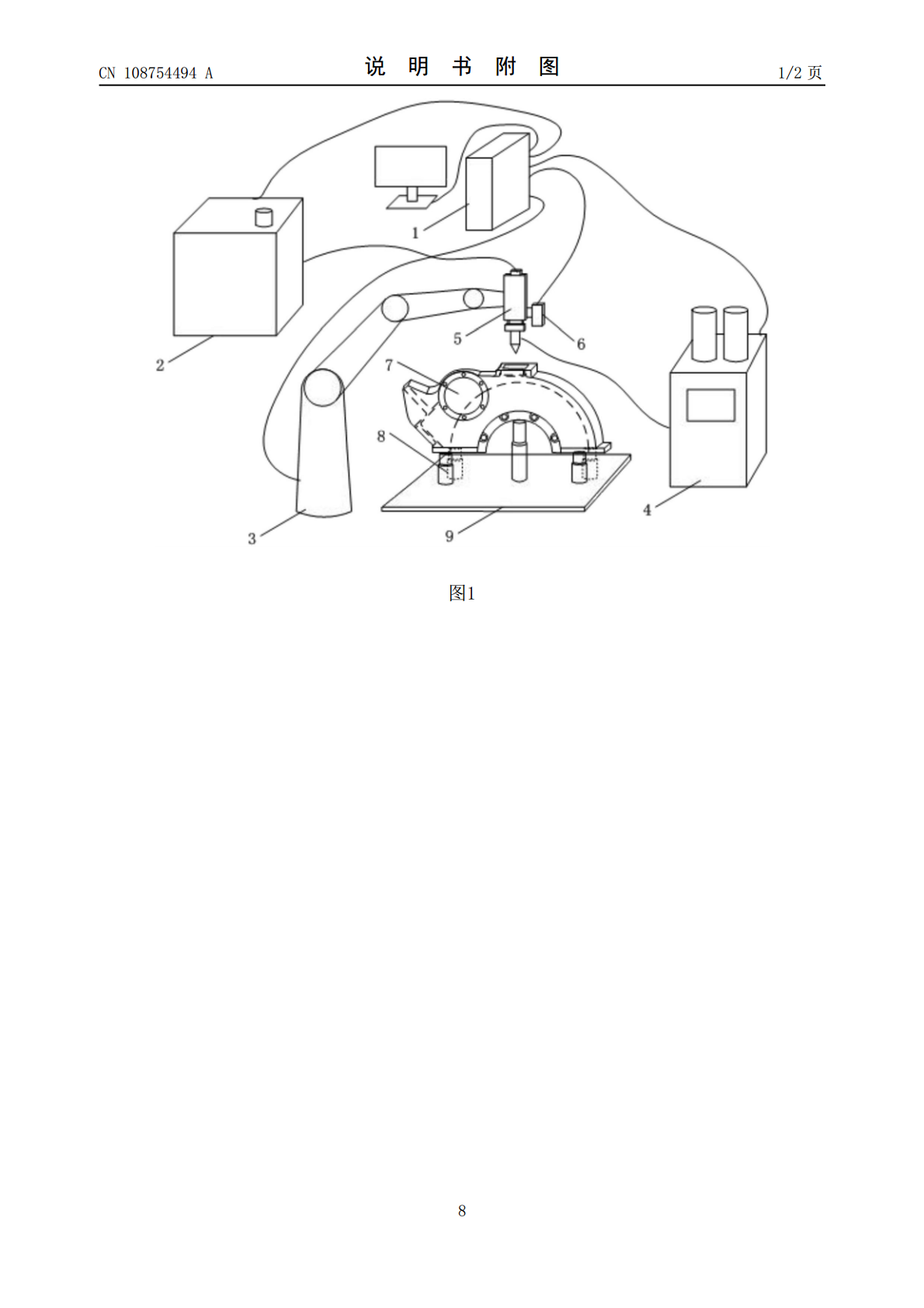
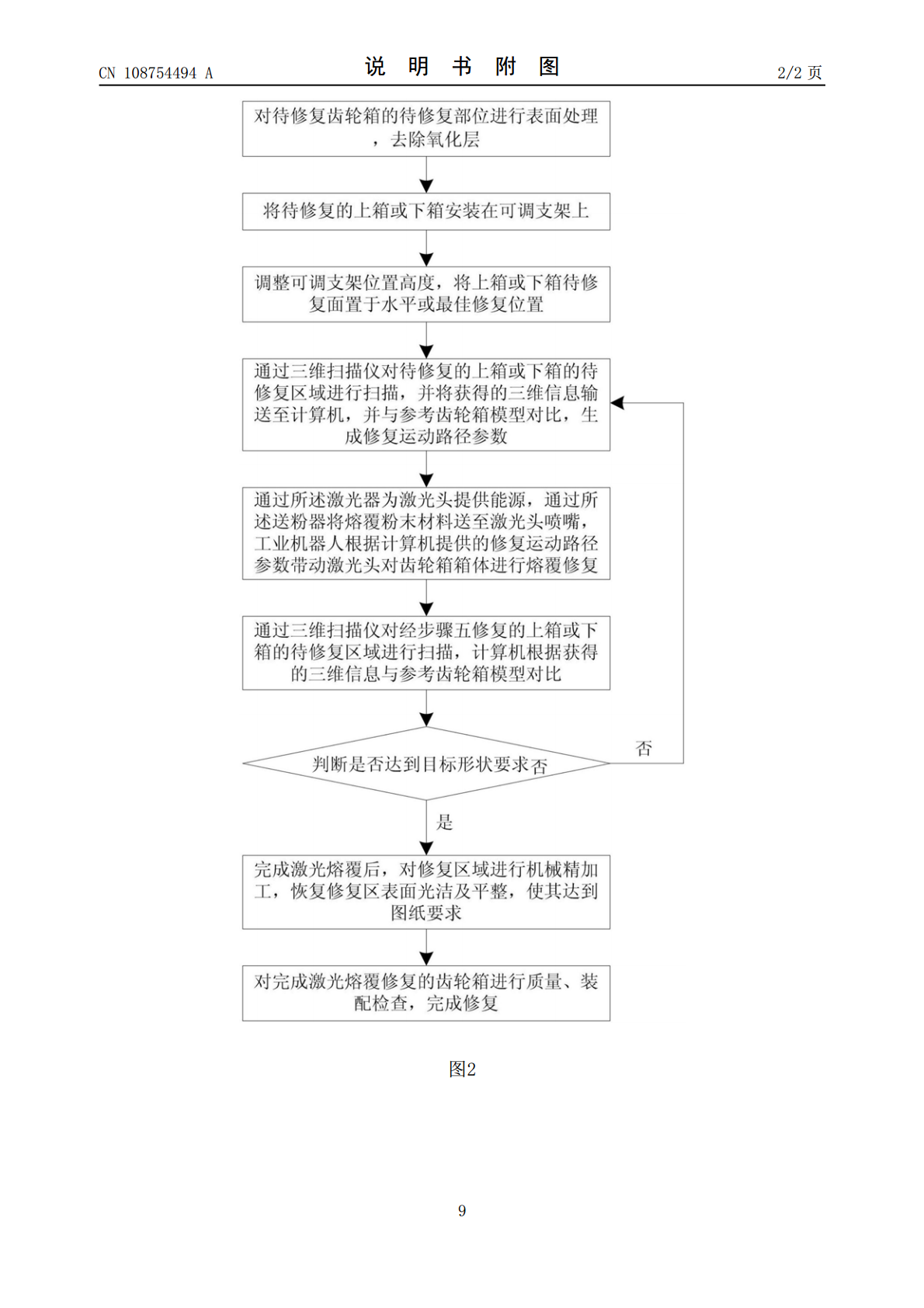
轨道车辆齿轮箱箱体修复设备及修复方法属于轨道车辆关键零部件的修复技术领域,目的在于解决现有修复技术修复质量差、精度低、通用性差、自动化程度低以及生产效率低的问题。本发明的修复设备包括:支撑单元;位于支撑单元上方的修复单元,对待修复齿轮箱裂痕进行熔覆修复;固定在修复单元修复输出端的扫描单元,对待修复齿轮箱进行扫描;以及控制单元,控制单元根据扫描单元获得的待修复齿轮箱表面信息与参考齿轮箱模型进行对比控制修复单元按照生成的修复路径对待修复齿轮箱进行修复。本发明修复方法以激光作为热源,利用激光熔覆组织快速冷凝的典
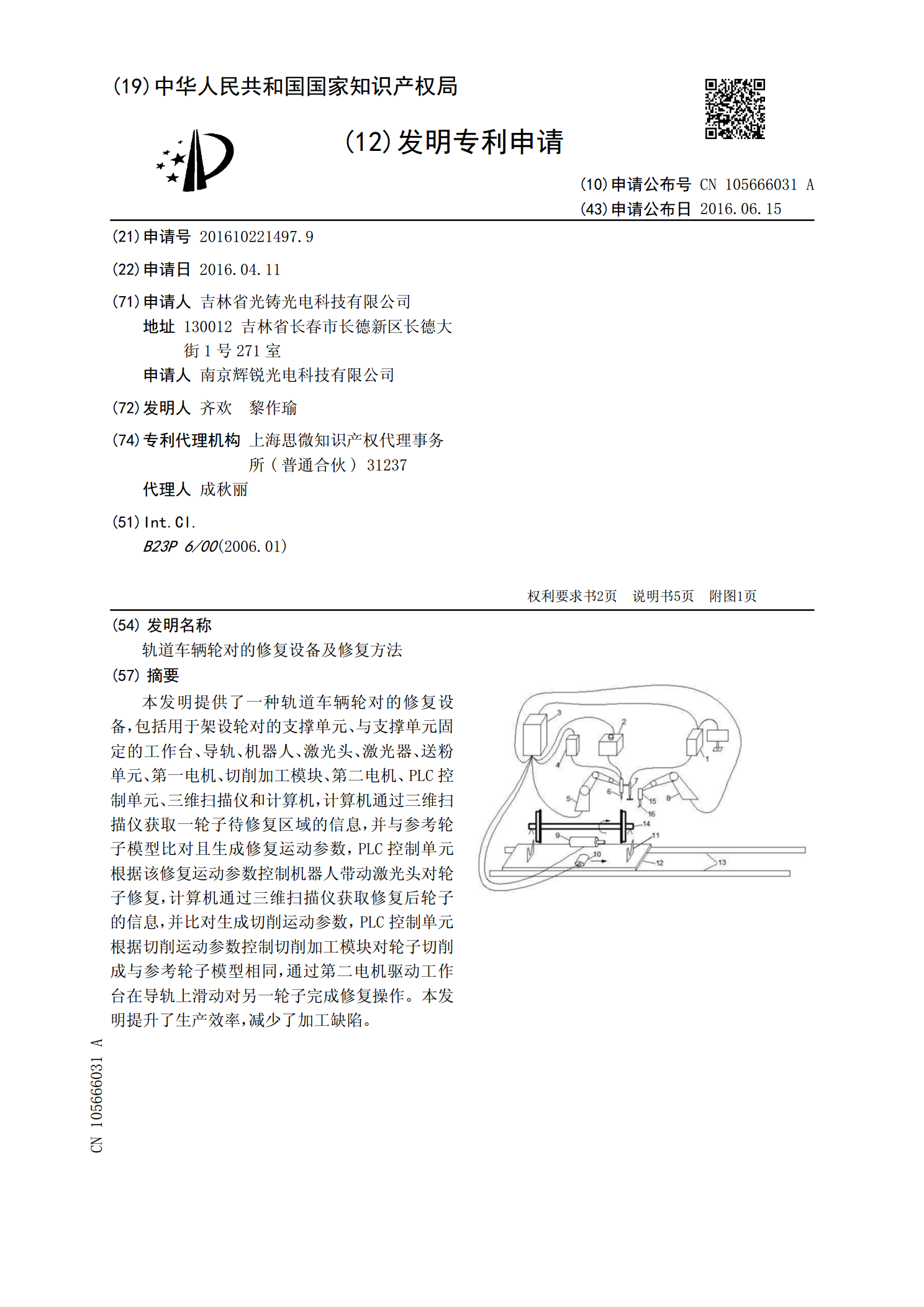
轨道车辆轮对的修复设备及修复方法.pdf
本发明提供了一种轨道车辆轮对的修复设备,包括用于架设轮对的支撑单元、与支撑单元固定的工作台、导轨、机器人、激光头、激光器、送粉单元、第一电机、切削加工模块、第二电机、PLC控制单元、三维扫描仪和计算机,计算机通过三维扫描仪获取一轮子待修复区域的信息,并与参考轮子模型比对且生成修复运动参数,PLC控制单元根据该修复运动参数控制机器人带动激光头对轮子修复,计算机通过三维扫描仪获取修复后轮子的信息,并比对生成切削运动参数,PLC控制单元根据切削运动参数控制切削加工模块对轮子切削成与参考轮子模型相同,通过第二电机
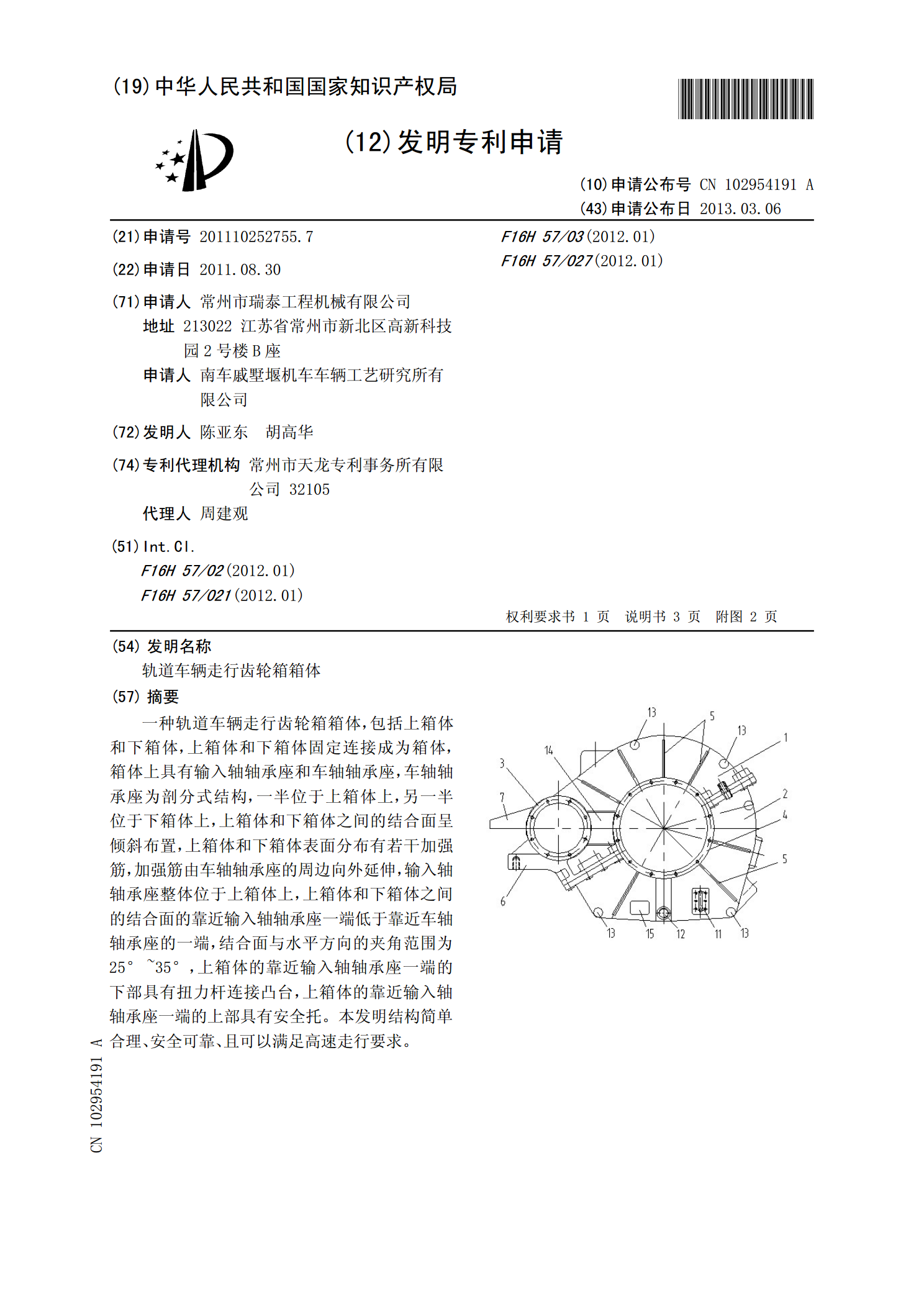
轨道车辆走行齿轮箱箱体.pdf
一种轨道车辆走行齿轮箱箱体,包括上箱体和下箱体,上箱体和下箱体固定连接成为箱体,箱体上具有输入轴轴承座和车轴轴承座,车轴轴承座为剖分式结构,一半位于上箱体上,另一半位于下箱体上,上箱体和下箱体之间的结合面呈倾斜布置,上箱体和下箱体表面分布有若干加强筋,加强筋由车轴轴承座的周边向外延伸,输入轴轴承座整体位于上箱体上,上箱体和下箱体之间的结合面的靠近输入轴轴承座一端低于靠近车轴轴承座的一端,结合面与水平方向的夹角范围为25°~35°,上箱体的靠近输入轴轴承座一端的下部具有扭力杆连接凸台,上箱体的靠近输入轴轴承

TDS系列顶驱齿轮箱体销孔偏磨修复方法探讨.docx
TDS系列顶驱齿轮箱体销孔偏磨修复方法探讨TDS系列顶驱齿轮箱体销孔偏磨修复方法探讨摘要TDS系列顶驱齿轮箱是钻井设备中关键部件之一,其正常运转对于钻井作业的开展至关重要。然而,在齿轮箱使用的过程中,销孔的偏磨问题常常会发生。本文针对TDS系列顶驱齿轮箱销孔偏磨问题展开探讨,以提供一种有效的修复方法,以保证齿轮箱的正常使用。关键词:TDS系列顶驱齿轮箱;销孔偏磨;修复方法引言TDS系列顶驱齿轮箱是一种常用的驱动装置,广泛应用于石油钻井领域。然而,由于工作环境的恶劣性质和长期高负荷工作,齿轮箱销孔偏磨问题十
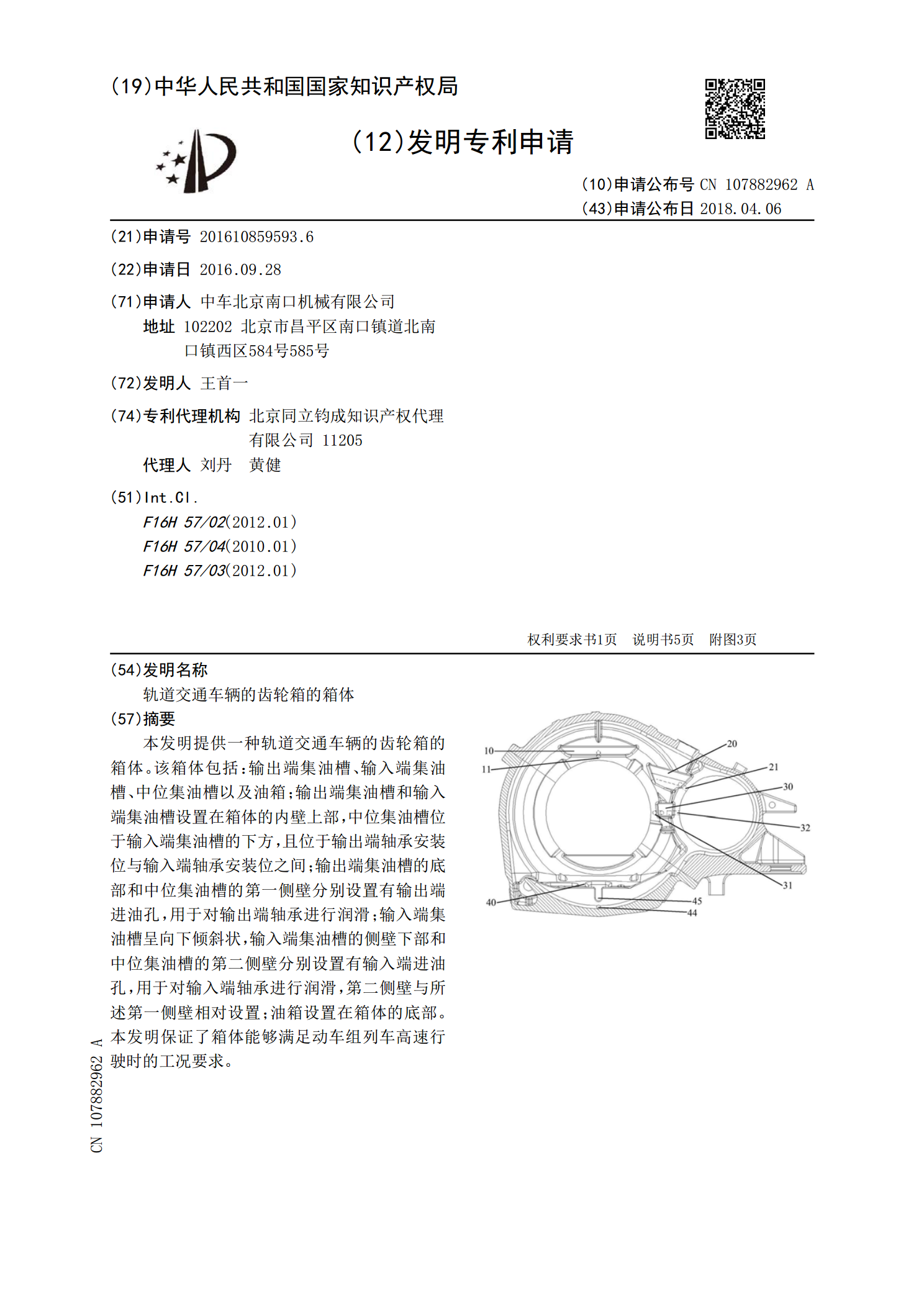
轨道交通车辆的齿轮箱的箱体.pdf
本发明提供一种轨道交通车辆的齿轮箱的箱体。该箱体包括:输出端集油槽、输入端集油槽、中位集油槽以及油箱;输出端集油槽和输入端集油槽设置在箱体的内壁上部,中位集油槽位于输入端集油槽的下方,且位于输出端轴承安装位与输入端轴承安装位之间;输出端集油槽的底部和中位集油槽的第一侧壁分别设置有输出端进油孔,用于对输出端轴承进行润滑;输入端集油槽呈向下倾斜状,输入端集油槽的侧壁下部和中位集油槽的第二侧壁分别设置有输入端进油孔,用于对输入端轴承进行润滑,第二侧壁与所述第一侧壁相对设置;油箱设置在箱体的底部。本发明保证了箱体