
一种线控四轮独立转向系统容错控制系统及其控制方法.pdf

永梅****33

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种线控四轮独立转向系统容错控制系统及其控制方法.pdf
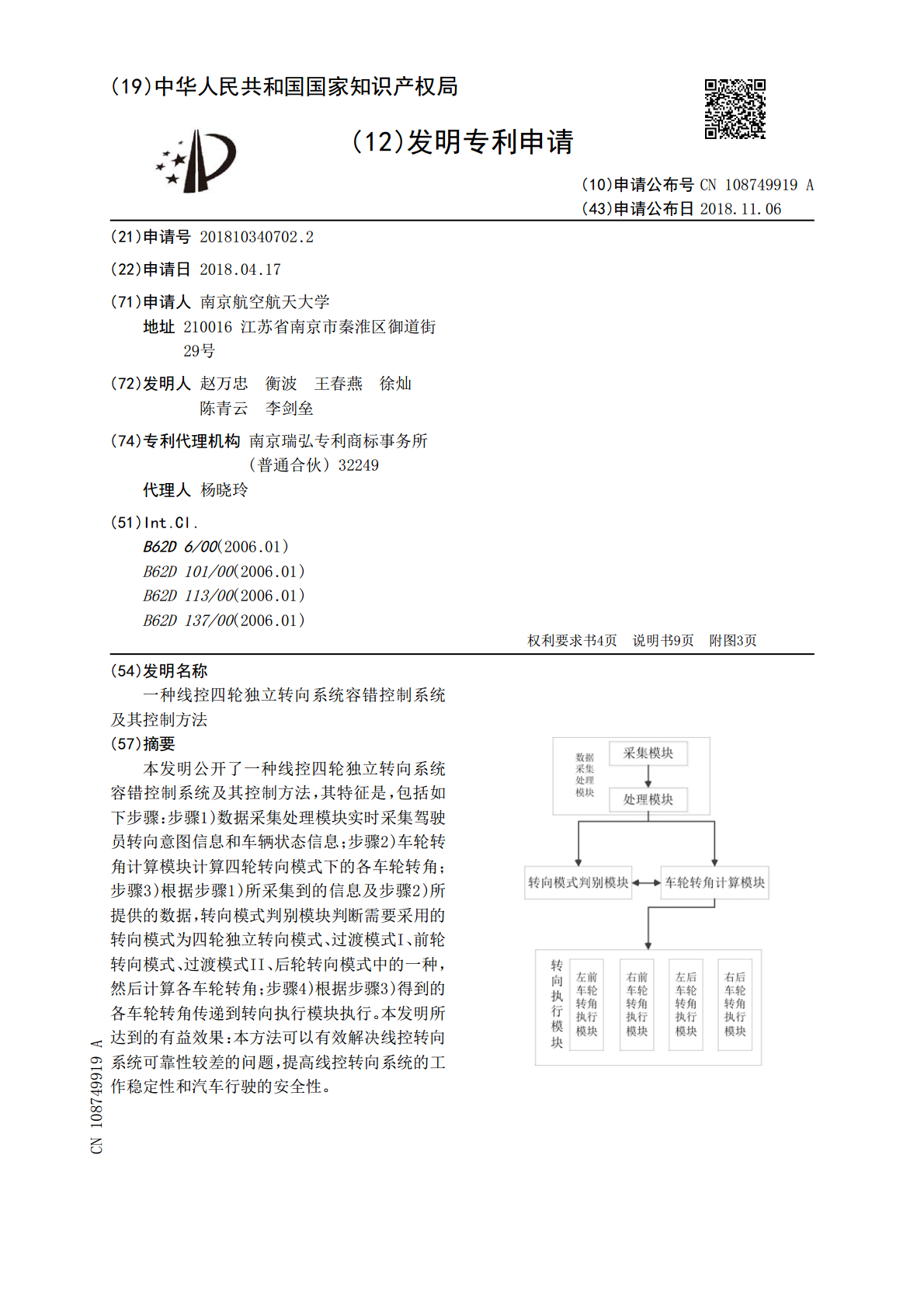
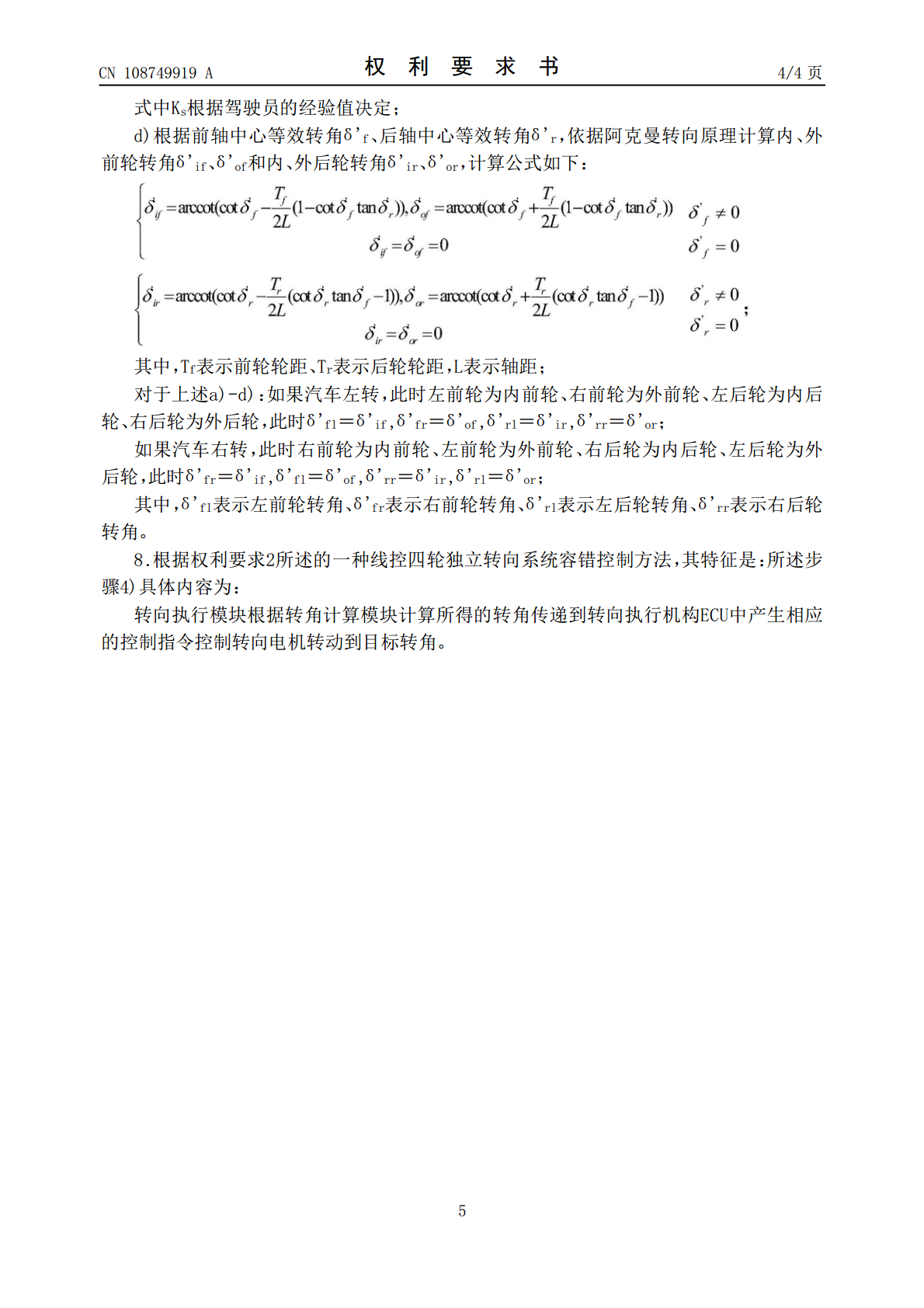
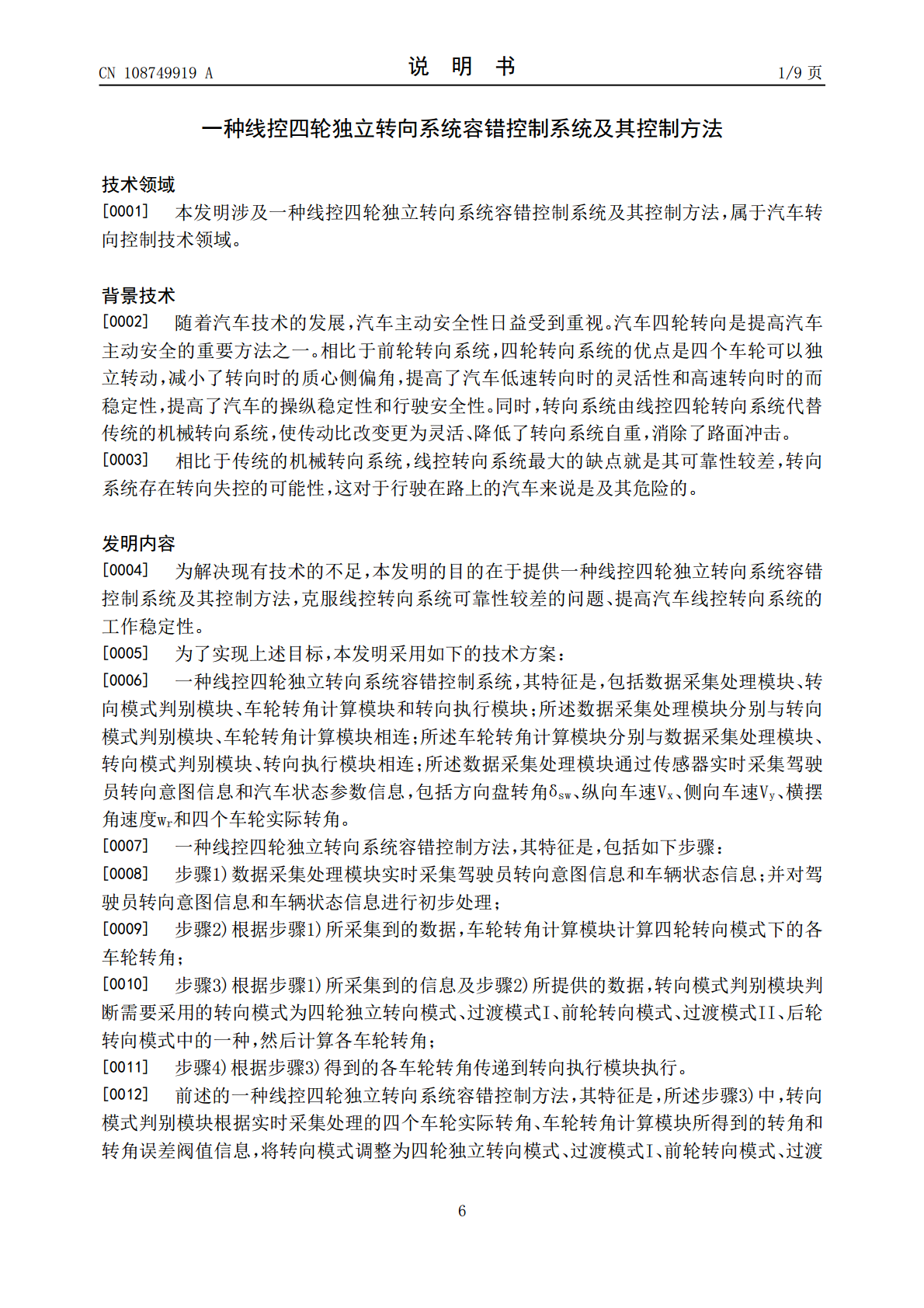
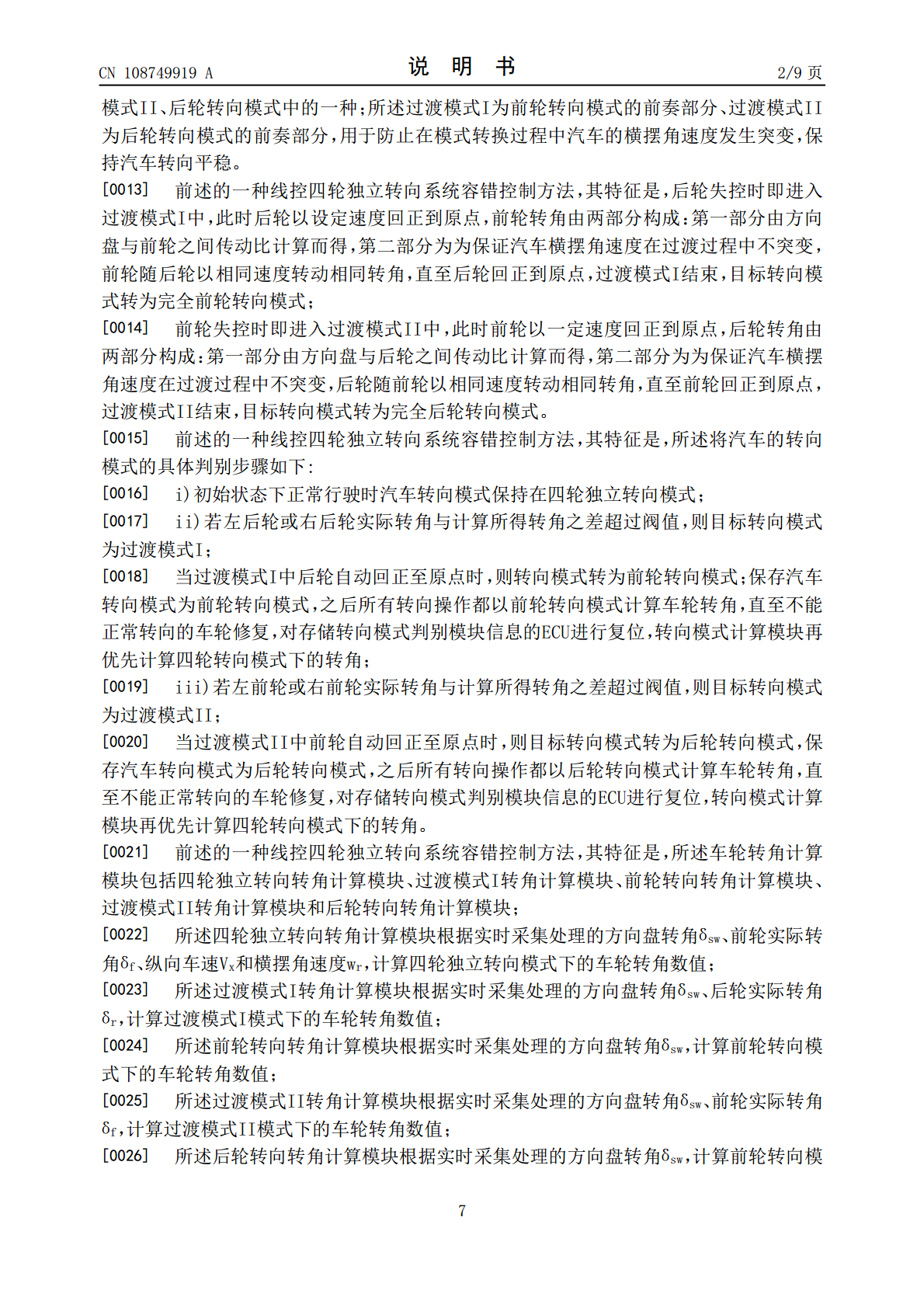
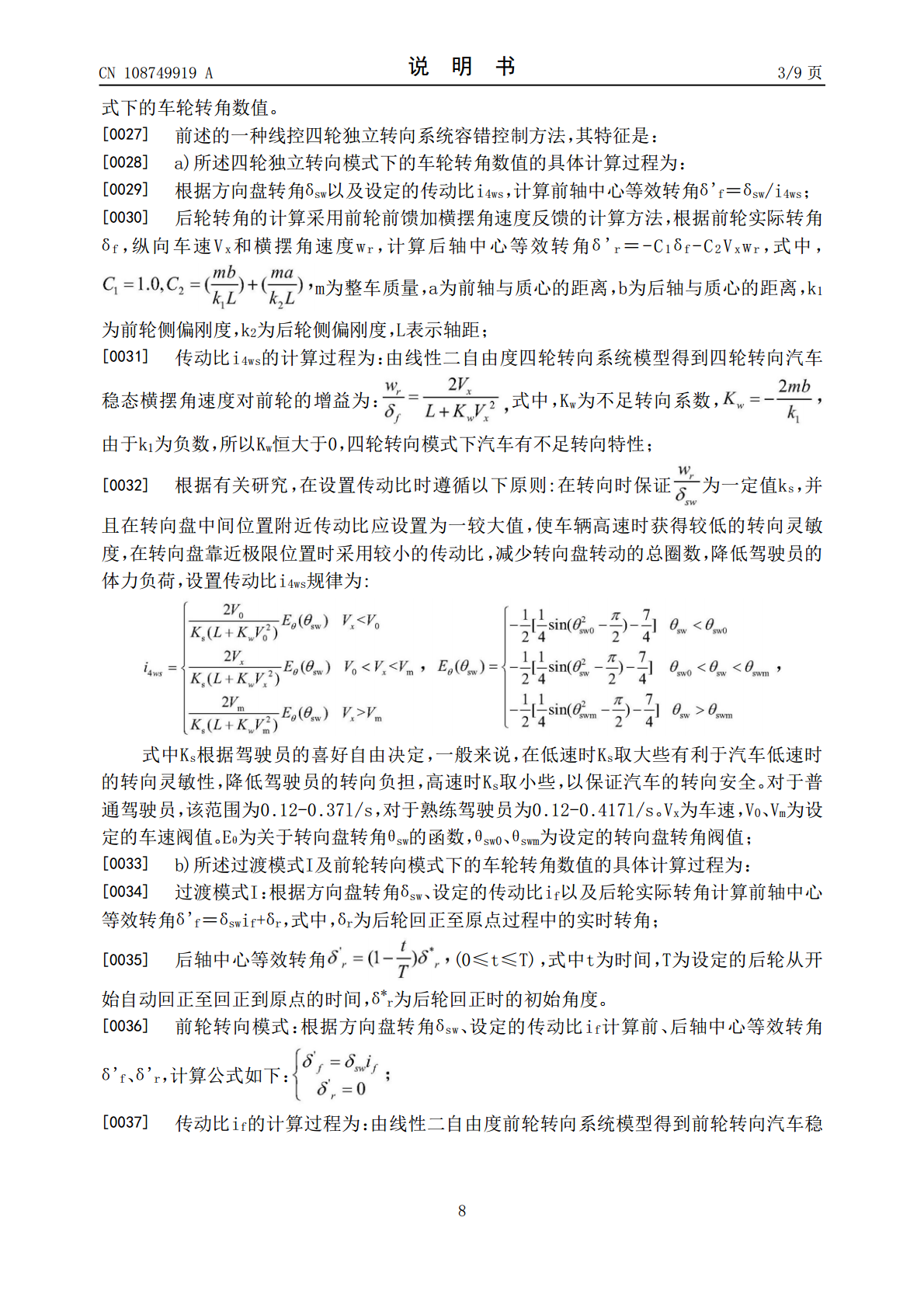
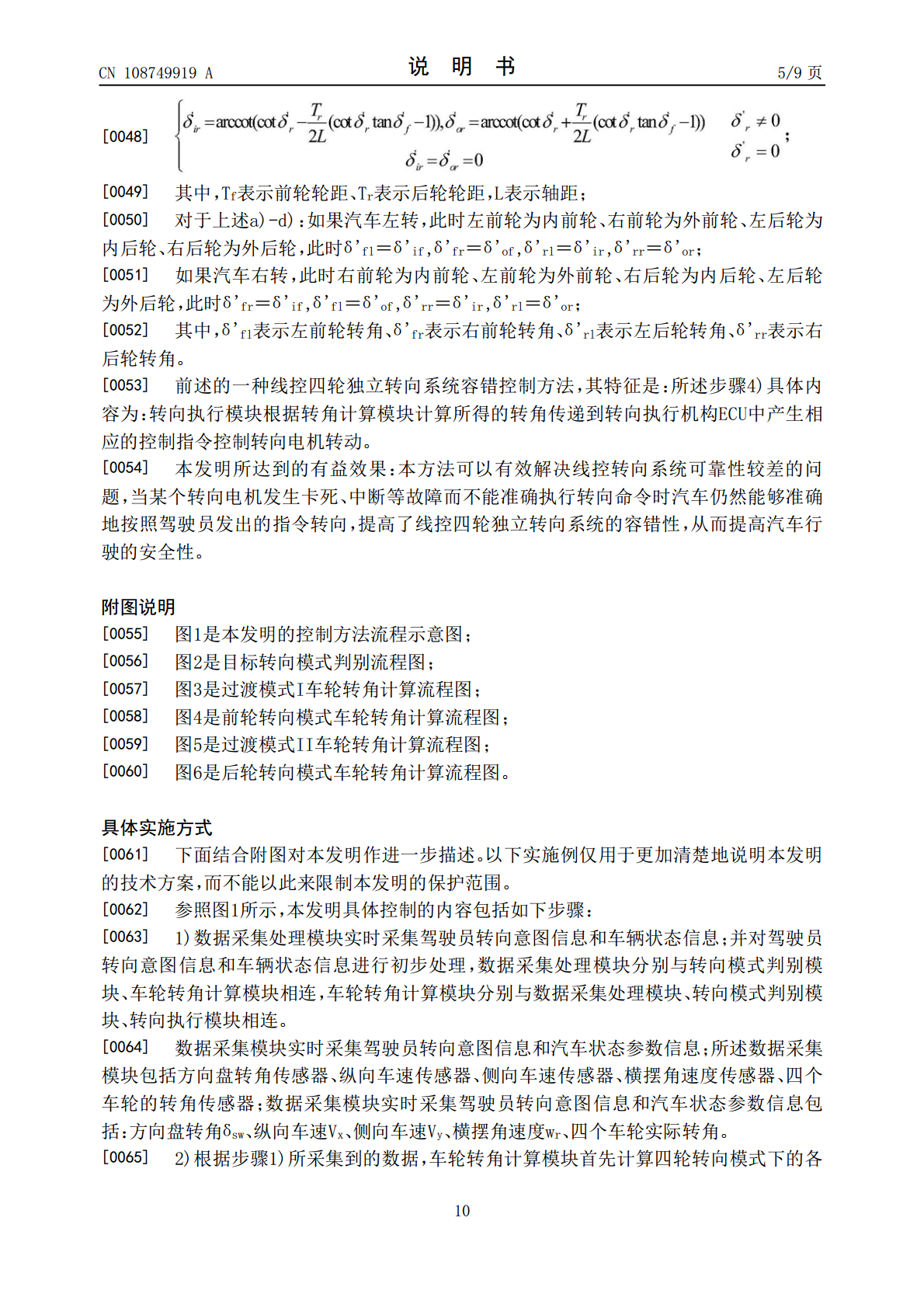
本发明公开了一种线控四轮独立转向系统容错控制系统及其控制方法,其特征是,包括如下步骤:步骤1)数据采集处理模块实时采集驾驶员转向意图信息和车辆状态信息;步骤2)车轮转角计算模块计算四轮转向模式下的各车轮转角;步骤3)根据步骤1)所采集到的信息及步骤2)所提供的数据,转向模式判别模块判断需要采用的转向模式为四轮独立转向模式、过渡模式I、前轮转向模式、过渡模式II、后轮转向模式中的一种,然后计算各车轮转角;步骤4)根据步骤3)得到的各车轮转角传递到转向执行模块执行。本发明所达到的有益效果:本方法可以有效解决线
车辆及其线控转向控制系统、方法.pdf
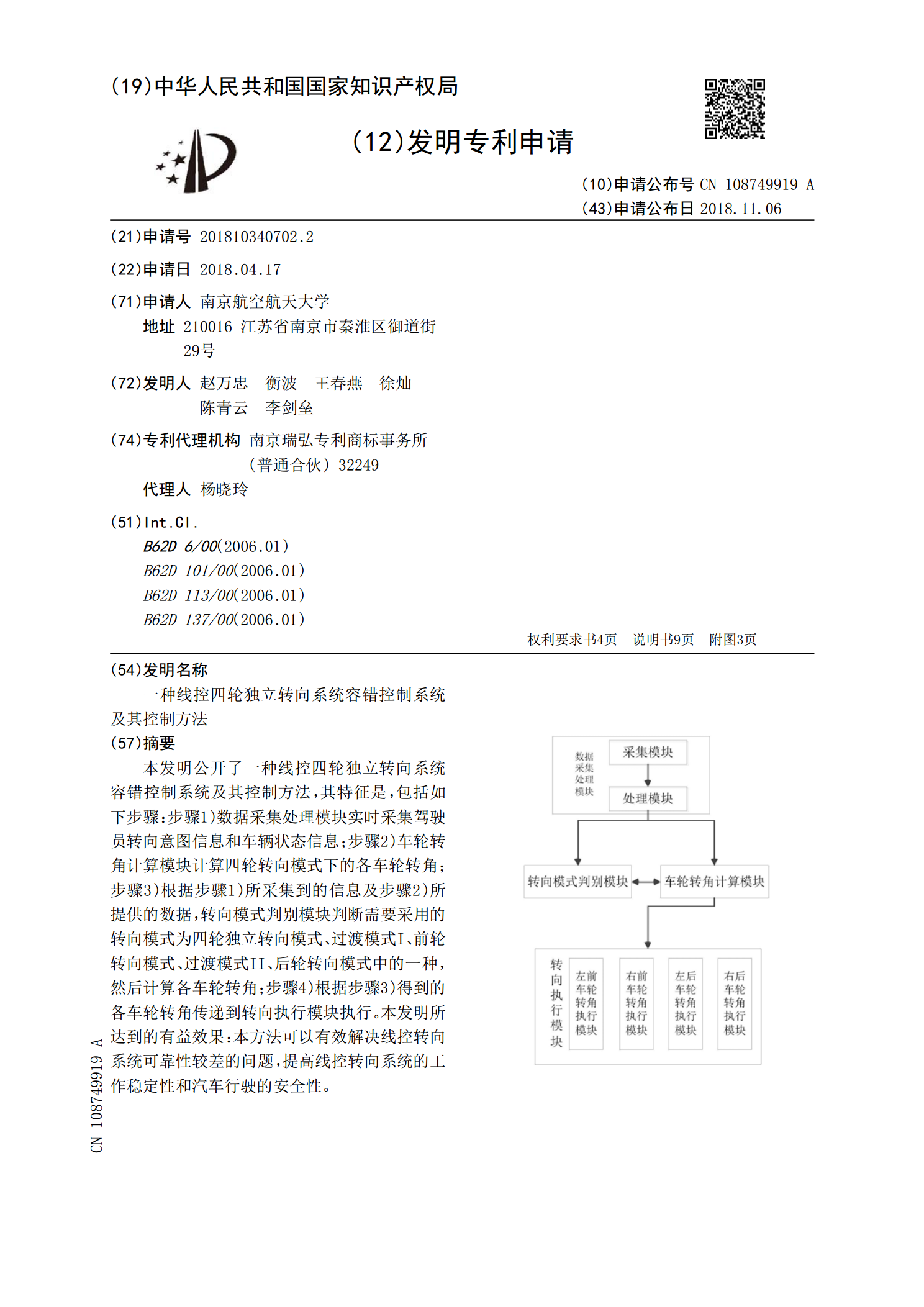
本发明公开了一种车辆及其线控转向控制系统、方法,该控制系统包括:中央控制模块,用于获取路感模拟电机的路感预测数据和转向执行电机的转向预测数据;车辆状态观测模块,用于获取实时车辆数据,并根据路感预测数据、转向预测数据及实时车辆数据确定车辆状态参数;路感模拟模块,用于根据车辆状态参数及路感预测数据确定路感电机目标扭矩,路感电机目标扭矩用于驱动路感模拟电机动作;转向执行模块,用于根据车辆状态参数及转向预测数据确定转向电机目标转角,转向电机目标转角用于驱动转向执行电机动作。本发明通过车辆状态观测模块实现路感模拟电

一种线控独立转向系统及其方法.pdf
本发明提供一种线控独立转向系统及其方法,包括检测机构、执行机构和控制单元。所述执行机构包括转向电机、车轮转向机构、供油系统和液压缸;在车辆正常行驶的情况下,利用左、右转向电机分别驱动左、右齿条进行独立转向协调控制;在左、右转向电机其中一个发生故障时,先通过电磁阀的闭合让左、右齿条结合为一体,采用另一个电机驱动齿轮齿条,保证车辆的正常转向,待车辆接近转向终了时,利用冗余备份的液压系统进行故障转向车轮的微调,以保证车辆正常的直线行驶以及转向行驶;本发明既能实现正常线控转向时左、右车轮单独转向灵活的协调控制,增

一种线控四轮独立转向系统及其控制方法.pdf
本发明公开了一种线控四轮独立转向系统及其控制方法,包括车架、悬架、车轮和套筒转向电机总成;其中,所述悬架分别与车轮和车架连接,所述悬架包括:下摆臂、转向节、弹簧上支座、弹簧下支座、弹簧和减震器,所述弹簧分别与弹簧上支座、弹簧下支座连接,并设于二者之间;所述下摆臂和减震器均与转向节连接,所述转向节与车轮连接;所述下摆臂还与车架连接,所述弹簧上支座通过球铰与车架连接,所述套筒转向电机总成与弹簧下支座固定连接,所述套筒转向电机驱动减震器绕其轴线转动输出力矩,使转向节带动车轮偏转实现转向。本发明解决了现有技术中传
一种线控四轮主动转向电动轮系统及其转向容错控制方法.pdf
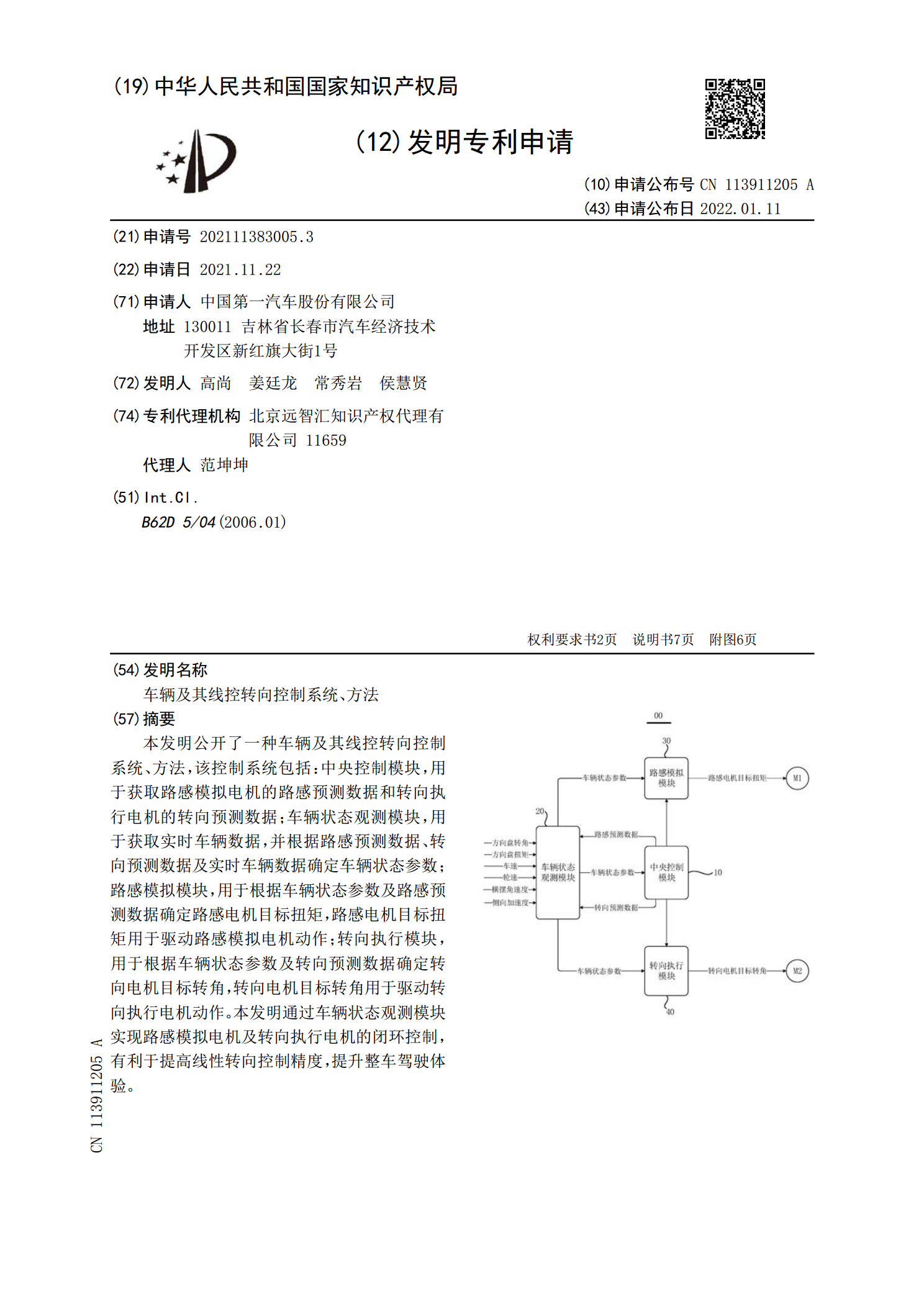
本发明公开了一种线控四轮主动转向电动轮系统及其转向容错控制方法,该系统包括方向盘、方向盘转角传感器、两个转向电机、两个电机控制单元、电机故障检测装置、两个齿轮齿条式转向器、两个转向横拉杆、四个车轮及轮毂电机、横摆角速度传感器、车速传感器、激光雷达、车载摄像机和整车控制单元,在行驶过程中,整车电子控制单元实时采集方向盘转角、横摆角速度、车速、激光雷达信号以及车载摄像机信号,通过设计的控制器计算出前后轮转角和四个轮毂电机的输出力矩并将这些信号传递到各电机控制器,电机控制器向电机发送电流信号完成转向操作;本发明