
一种线控四轮主动转向电动轮系统及其转向容错控制方法.pdf

一条****涛k

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种线控四轮主动转向电动轮系统及其转向容错控制方法.pdf
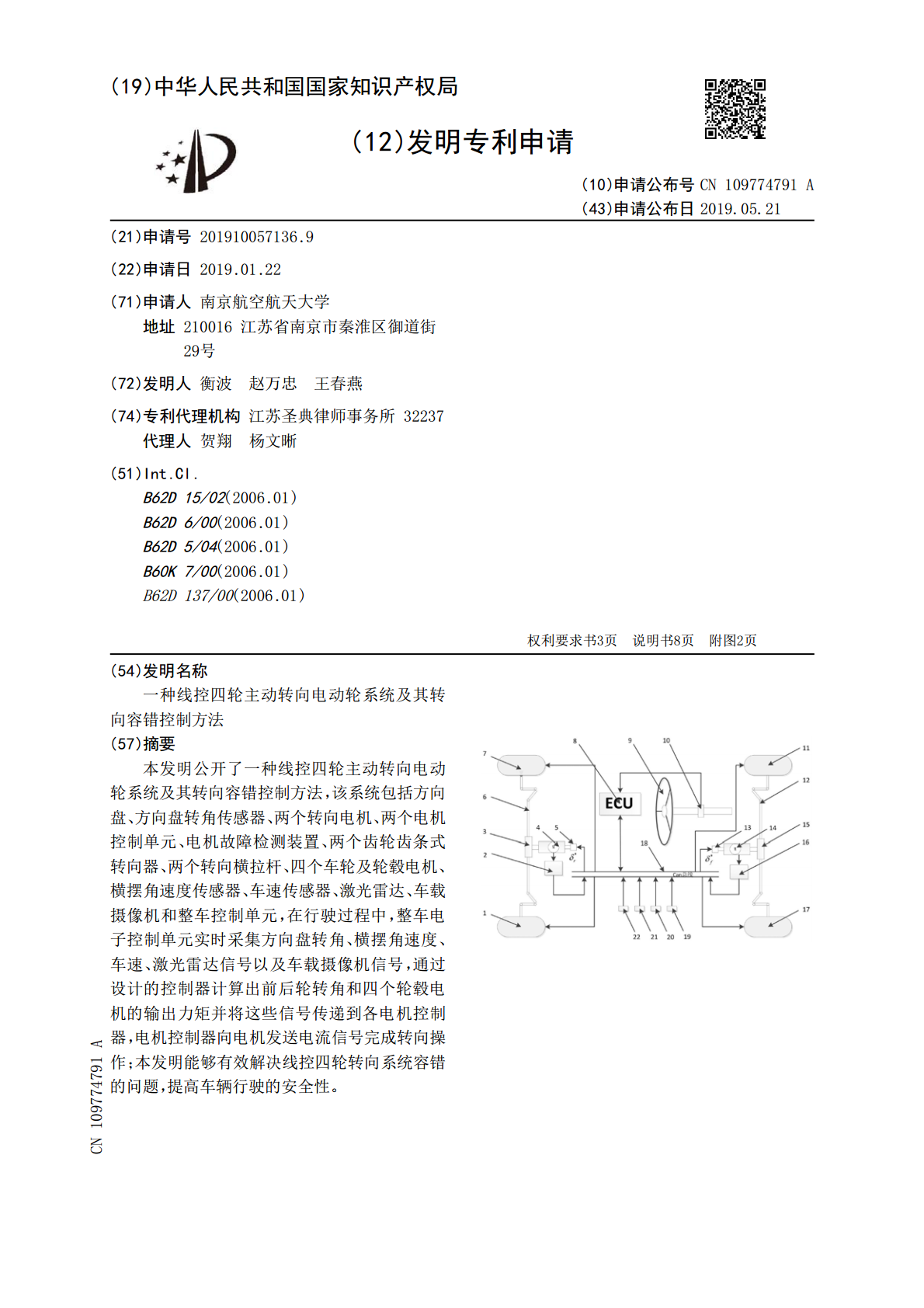
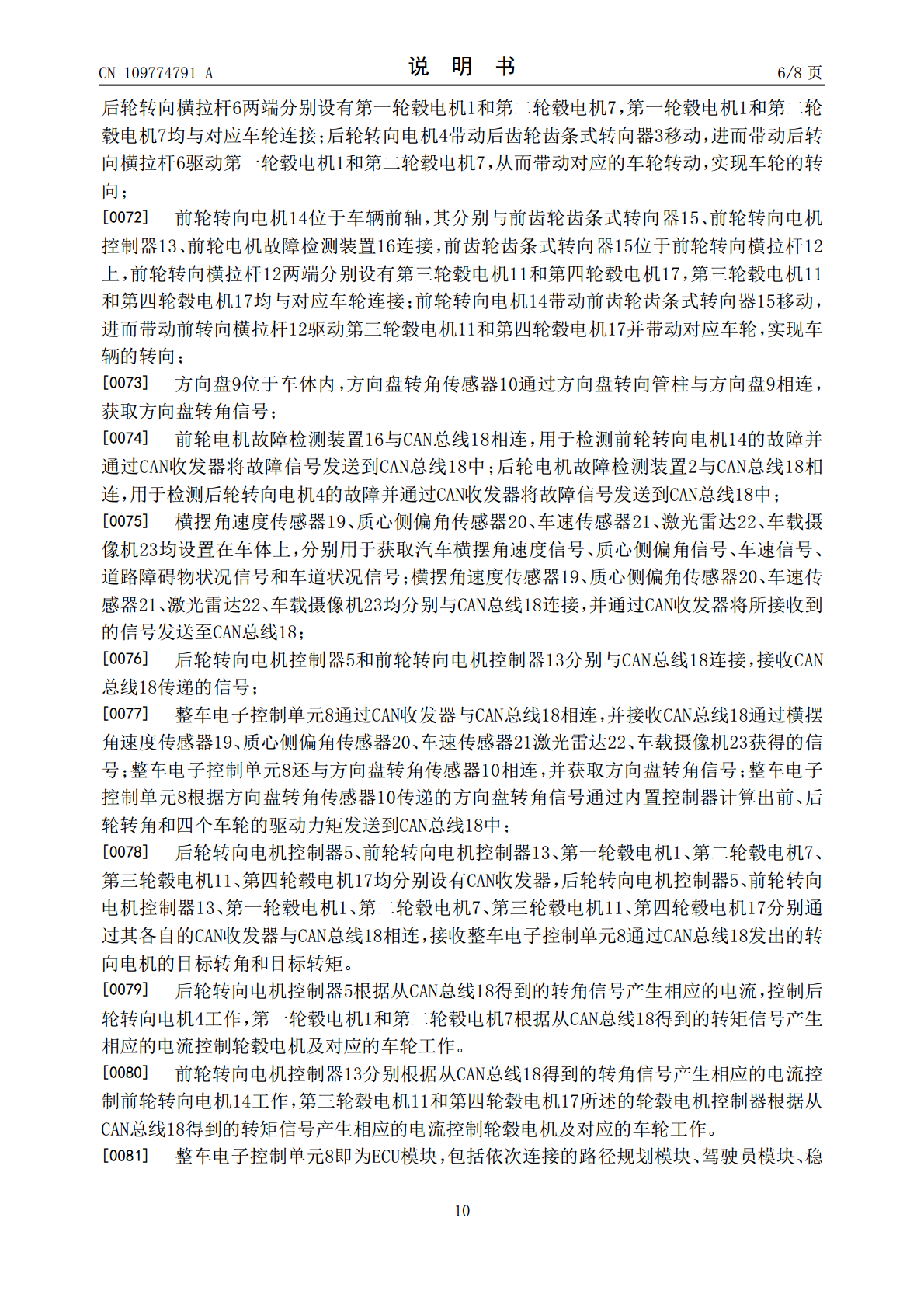
本发明公开了一种线控四轮主动转向电动轮系统及其转向容错控制方法,该系统包括方向盘、方向盘转角传感器、两个转向电机、两个电机控制单元、电机故障检测装置、两个齿轮齿条式转向器、两个转向横拉杆、四个车轮及轮毂电机、横摆角速度传感器、车速传感器、激光雷达、车载摄像机和整车控制单元,在行驶过程中,整车电子控制单元实时采集方向盘转角、横摆角速度、车速、激光雷达信号以及车载摄像机信号,通过设计的控制器计算出前后轮转角和四个轮毂电机的输出力矩并将这些信号传递到各电机控制器,电机控制器向电机发送电流信号完成转向操作;本发明
一种双电机线控转向系统及其主动容错控制方法.pdf
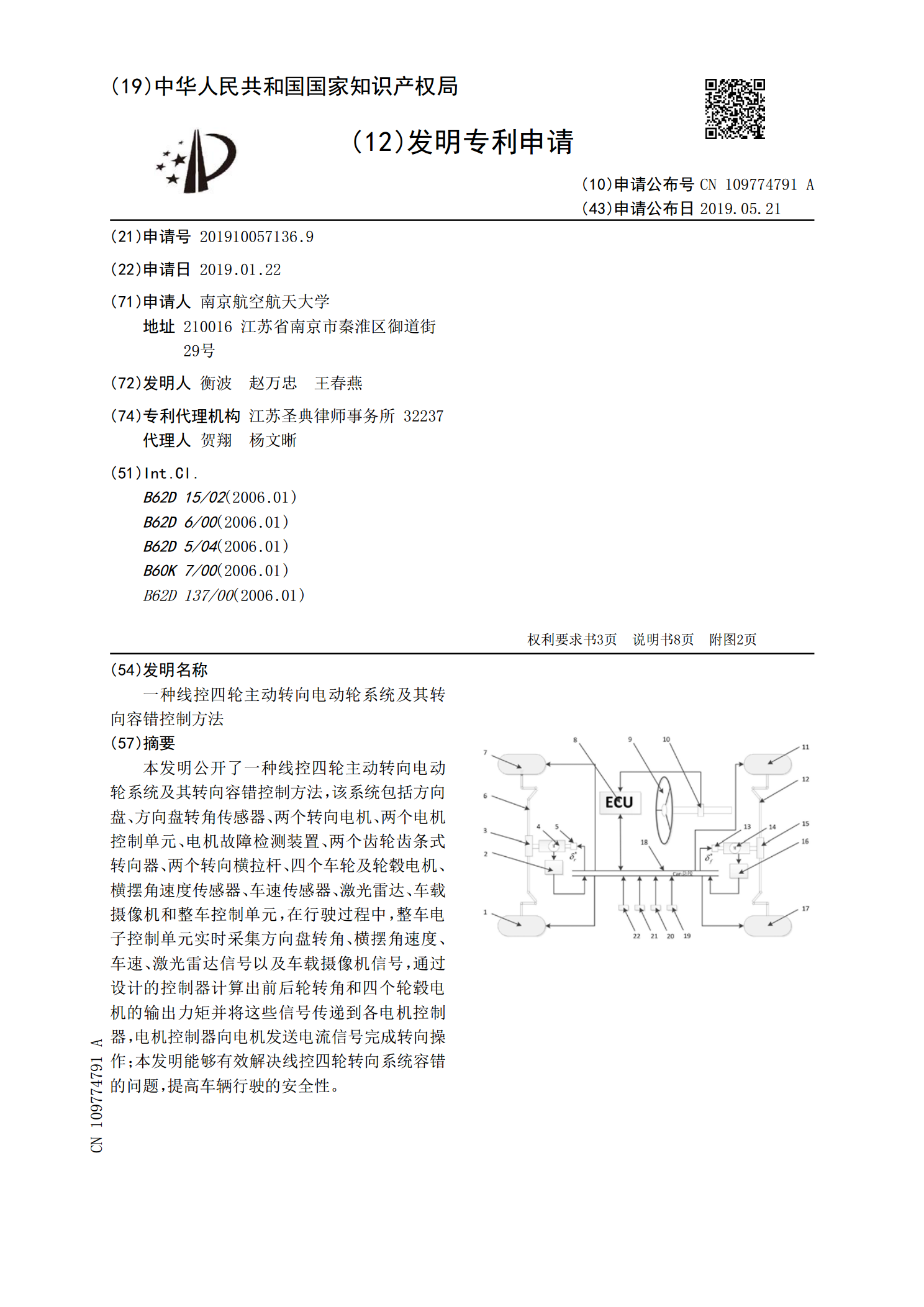
本发明提供了一种双电机线控转向系统及其主动容错控制方法,所述方法包括:车辆前轮转角跟踪控制器、车辆稳定性控制器以及基于变参数模型(LPV)设计的非线性模型控制方法。前轮转角跟踪控制器与稳定性控制器是基于线性二次型调节器(LQR)以及最优控制算法设计的,包括:求解理想前轮转角;建立车辆双电机转向执行系统的动力学模型;根据理想前轮转角与转向系统动力学模型,设计转角跟踪控制器及稳定性控制器。双电机主动容错控制包括:通过双电机转矩传感器与前轮转角跟踪控制器输出的控制转矩比较,计算故障系数,将转向执行机构模型优化为

基于线控转向双电机的主动容错和故障缓解系统及其控制方法.pdf
本申请公开一种基于线控转向双电机的主动容错和故障缓解系统及其模式切换控制方法,该系统包含所述系统包括依次连接的采集单元、转向盘总成、ECU控制模块和前轮转向总成,容错控制器;其控制方法包括采集单元将采集到的汽车信号传递给ECU控制模块,再通过容错控制策略单元、横摆角速度计算单元,稳定性控制单元、双机补偿单元,选取对应的补偿策略,作用于齿条机构;本申请提供的系统和方法可以依据故障电机不同的故障工况,在主动容错及故障缓解模式中进行切换,实现汽车实时性能的最优控制,从而保证汽车在汽车野外故障条件下的行驶性和较高
一种线控四轮独立转向系统容错控制系统及其控制方法.pdf
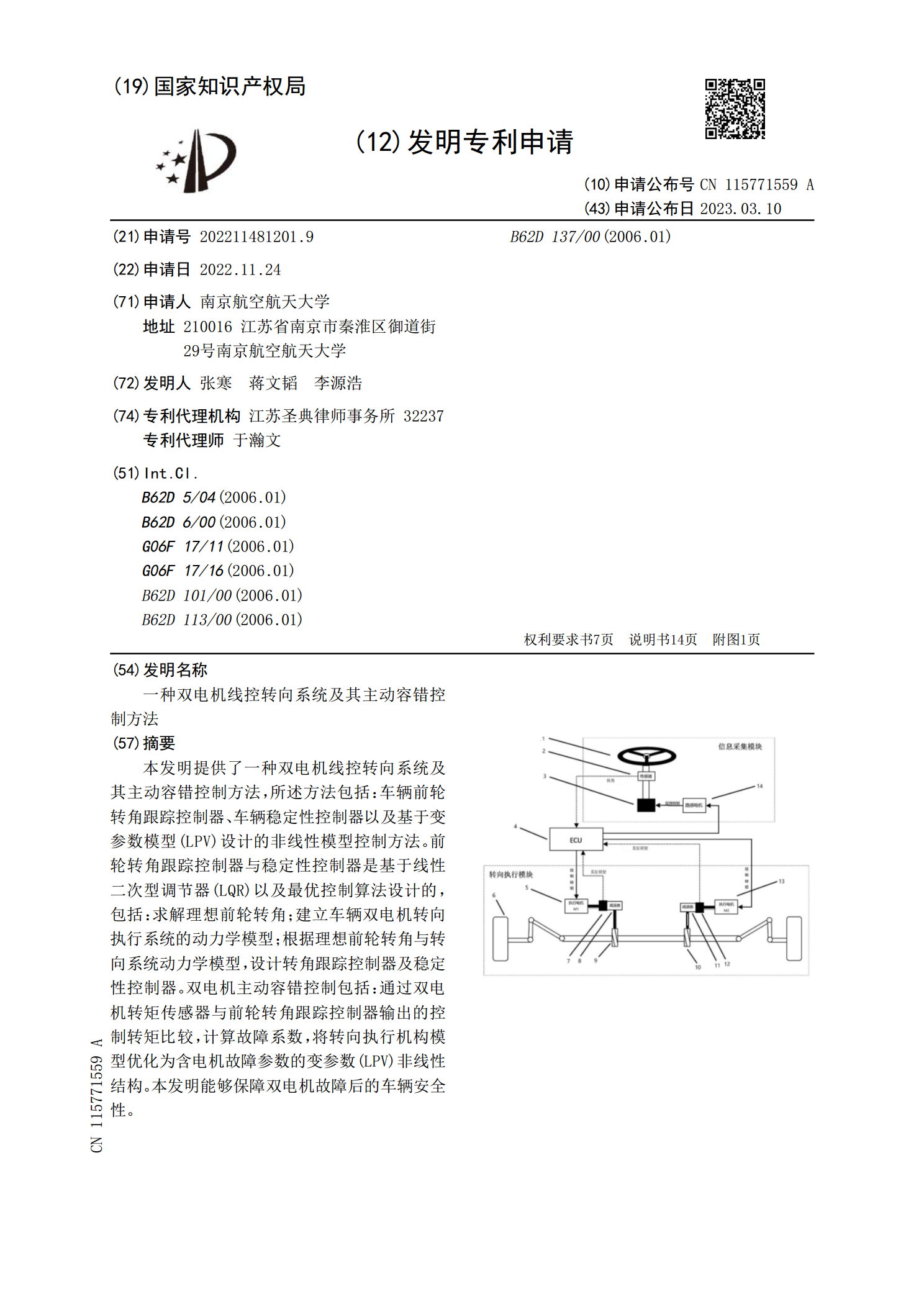
本发明公开了一种线控四轮独立转向系统容错控制系统及其控制方法,其特征是,包括如下步骤:步骤1)数据采集处理模块实时采集驾驶员转向意图信息和车辆状态信息;步骤2)车轮转角计算模块计算四轮转向模式下的各车轮转角;步骤3)根据步骤1)所采集到的信息及步骤2)所提供的数据,转向模式判别模块判断需要采用的转向模式为四轮独立转向模式、过渡模式I、前轮转向模式、过渡模式II、后轮转向模式中的一种,然后计算各车轮转角;步骤4)根据步骤3)得到的各车轮转角传递到转向执行模块执行。本发明所达到的有益效果:本方法可以有效解决线

线控转向系统前轮主动转向控制策略研究.docx
线控转向系统前轮主动转向控制策略研究线控转向系统前轮主动转向控制策略研究摘要:线控转向系统是一种通过电子控制增加或减少前轮转向角度,以提高汽车操控性和行驶稳定性的一种智能驾驶辅助系统。本文对线控转向系统的前轮主动转向控制策略进行了研究。通过分析传统转向系统的不足以及前轮主动转向系统的优势,提出了前轮主动转向系统的应用前景及控制策略的关键技术。研究结果表明,通过合理的控制策略,前轮主动转向系统能够有效改善汽车的操控性能和行驶稳定性,使驾驶体验更加舒适和安全。关键词:线控转向系统,前轮主动转向,控制策略,操控