
基于无线信号强度的割草机器人遍历路径规划方法.pdf

邻家****ng


1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于无线信号强度的割草机器人遍历路径规划方法.pdf
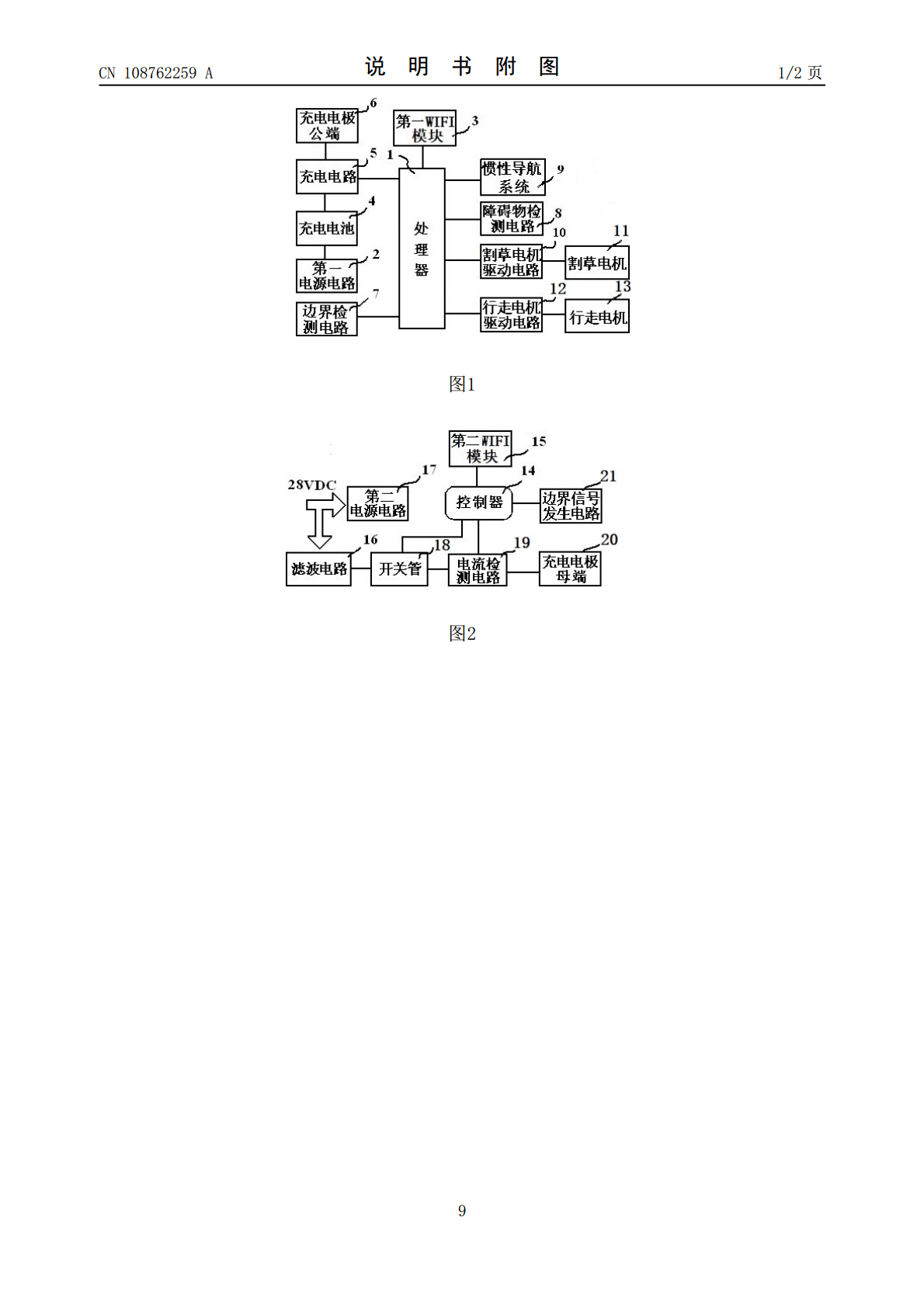
本发明公开一种基于无线信号强度的割草机器人遍历路径规划方法,割草机器人包括行走轮和与行走轮连接的行走电机,割草机构和与割草机构连接的割草电机,设置在割草机器人前端的充电电极公端以及主控电子装置设,充电基座包括充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第二WIFI模块,主控电子装置设置处理器和与处理器连接的第一WIFI模块,以及设置在处理器中的遍历路径规划方法,遍历路径规划方法包括八个步骤:割草机器人在边界范围内,沿无线信号强度等值线向左运动,到边界以后再移动一
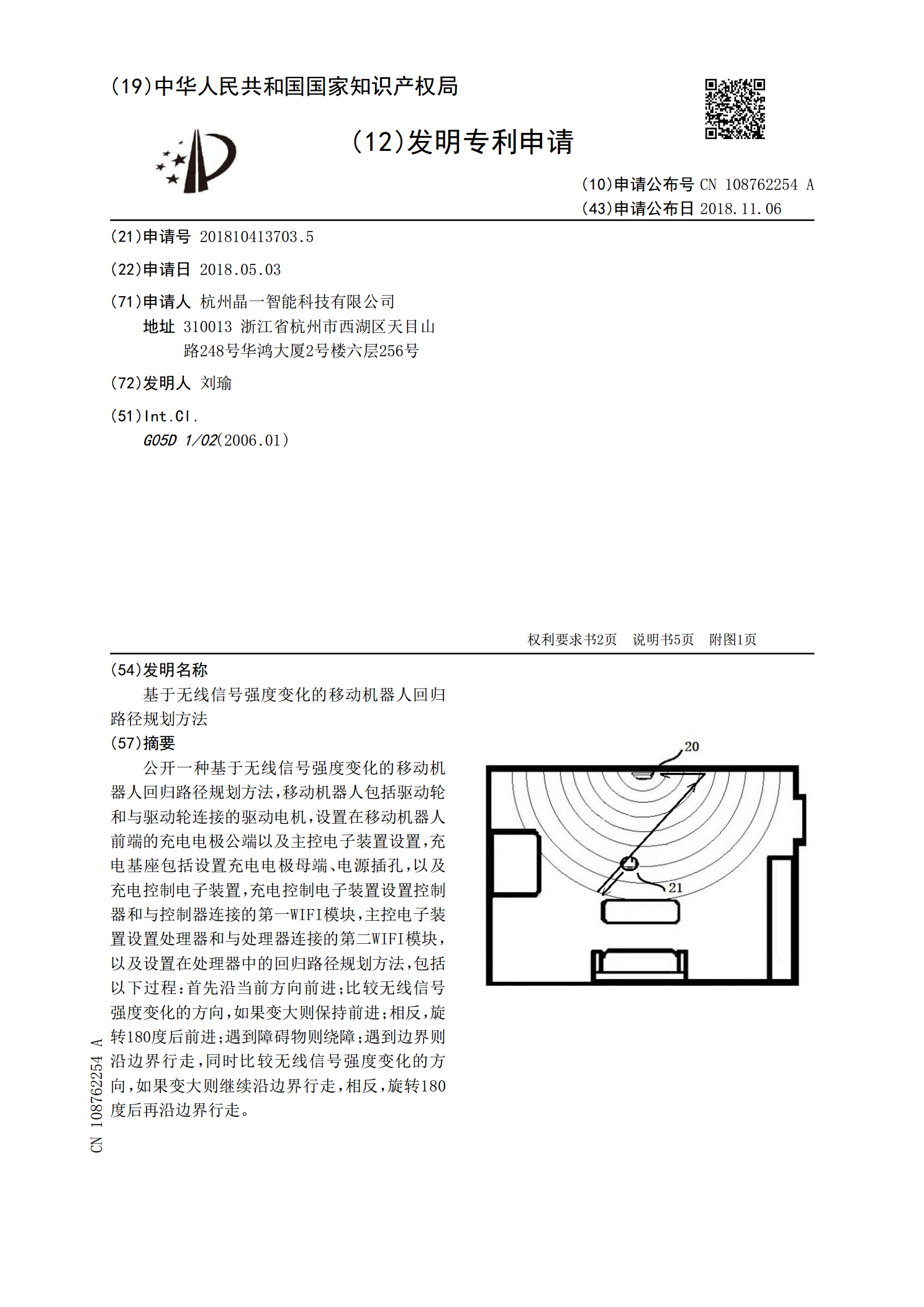
基于无线信号强度变化的移动机器人回归路径规划方法.pdf
公开一种基于无线信号强度变化的移动机器人回归路径规划方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,主控电子装置设置处理器和与处理器连接的第二WIFI模块,以及设置在处理器中的回归路径规划方法,包括以下过程:首先沿当前方向前进;比较无线信号强度变化的方向,如果变大则保持前进;相反,旋转180度后前进;遇到障碍物则绕障;遇到边界
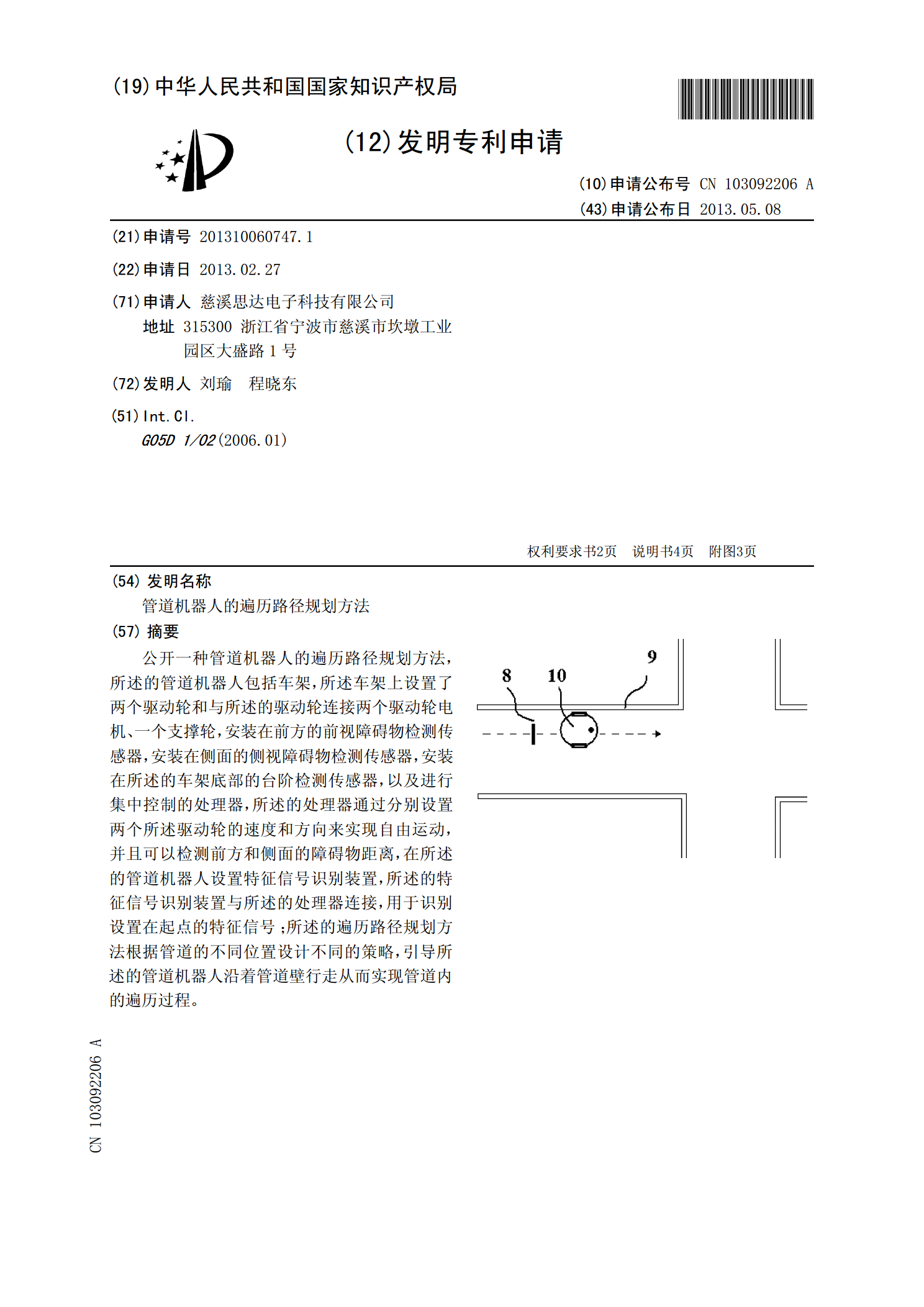
管道机器人的遍历路径规划方法.pdf
公开一种管道机器人的遍历路径规划方法,所述的管道机器人包括车架,所述车架上设置了两个驱动轮和与所述的驱动轮连接两个驱动轮电机、一个支撑轮,安装在前方的前视障碍物检测传感器,安装在侧面的侧视障碍物检测传感器,安装在所述的车架底部的台阶检测传感器,以及进行集中控制的处理器,所述的处理器通过分别设置两个所述驱动轮的速度和方向来实现自由运动,并且可以检测前方和侧面的障碍物距离,在所述的管道机器人设置特征信号识别装置,所述的特征信号识别装置与所述的处理器连接,用于识别设置在起点的特征信号;所述的遍历路径规划方法根据
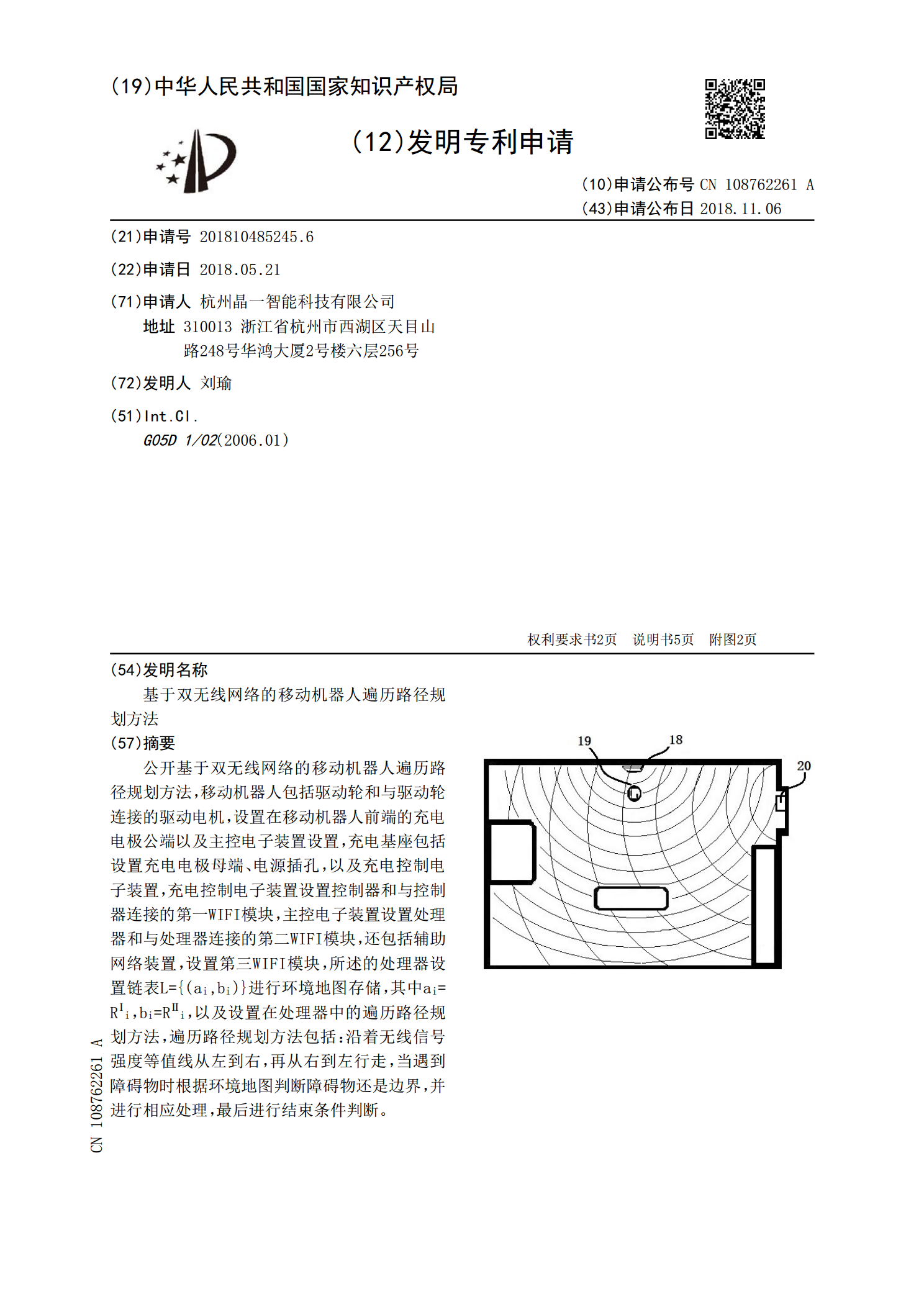
基于双无线网络的移动机器人遍历路径规划方法.pdf
公开基于双无线网络的移动机器人遍历路径规划方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,主控电子装置设置处理器和与处理器连接的第二WIFI模块,还包括辅助网络装置,设置第三WIFI模块,所述的处理器设置链表L={(a
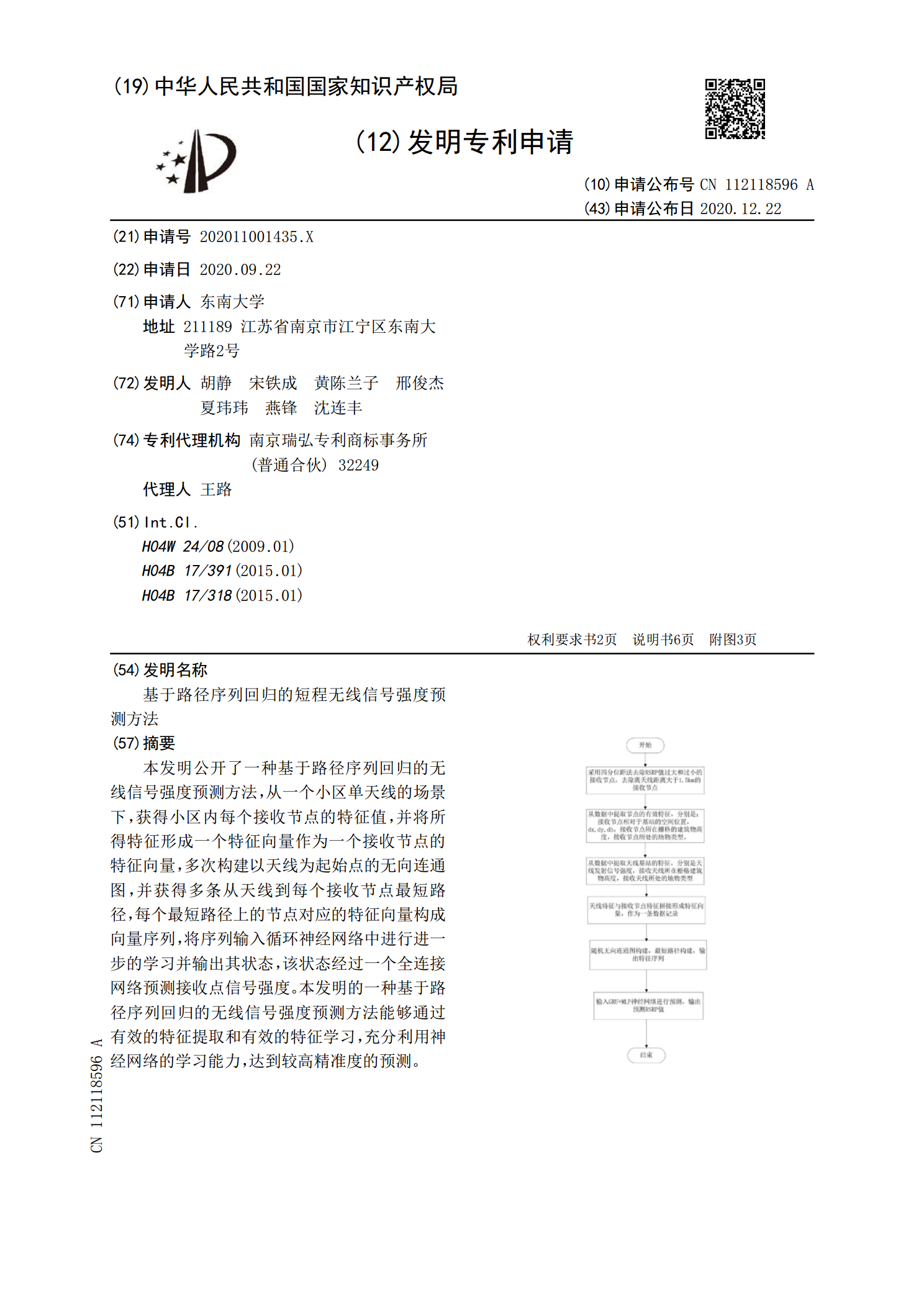
基于路径序列回归的短程无线信号强度预测方法.pdf
本发明公开了一种基于路径序列回归的无线信号强度预测方法,从一个小区单天线的场景下,获得小区内每个接收节点的特征值,并将所得特征形成一个特征向量作为一个接收节点的特征向量,多次构建以天线为起始点的无向连通图,并获得多条从天线到每个接收节点最短路径,每个最短路径上的节点对应的特征向量构成向量序列,将序列输入循环神经网络中进行进一步的学习并输出其状态,该状态经过一个全连接网络预测接收点信号强度。本发明的一种基于路径序列回归的无线信号强度预测方法能够通过有效的特征提取和有效的特征学习,充分利用神经网络的学习能力,