
基于路径序列回归的短程无线信号强度预测方法.pdf

文库****坚白

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于路径序列回归的短程无线信号强度预测方法.pdf
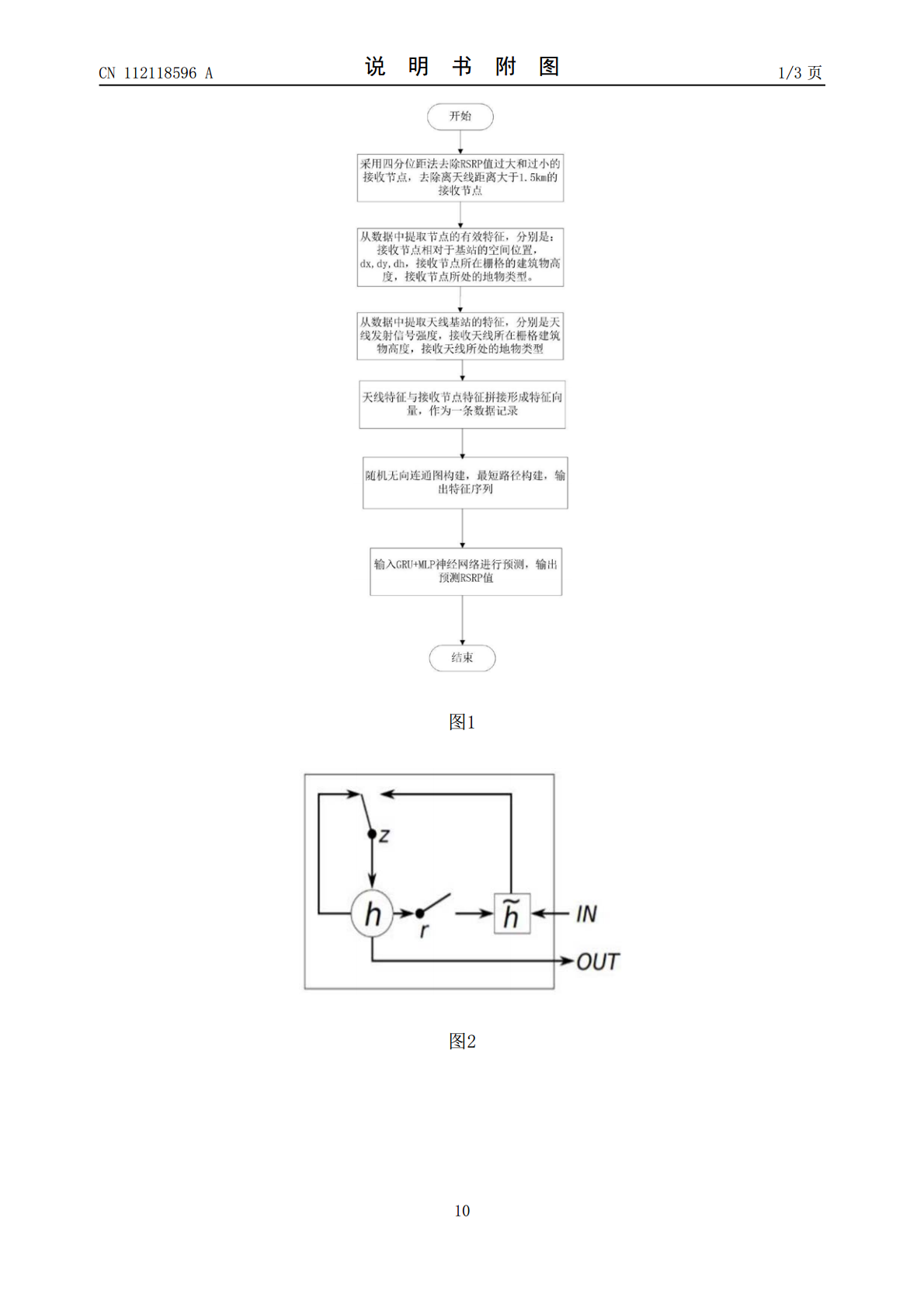
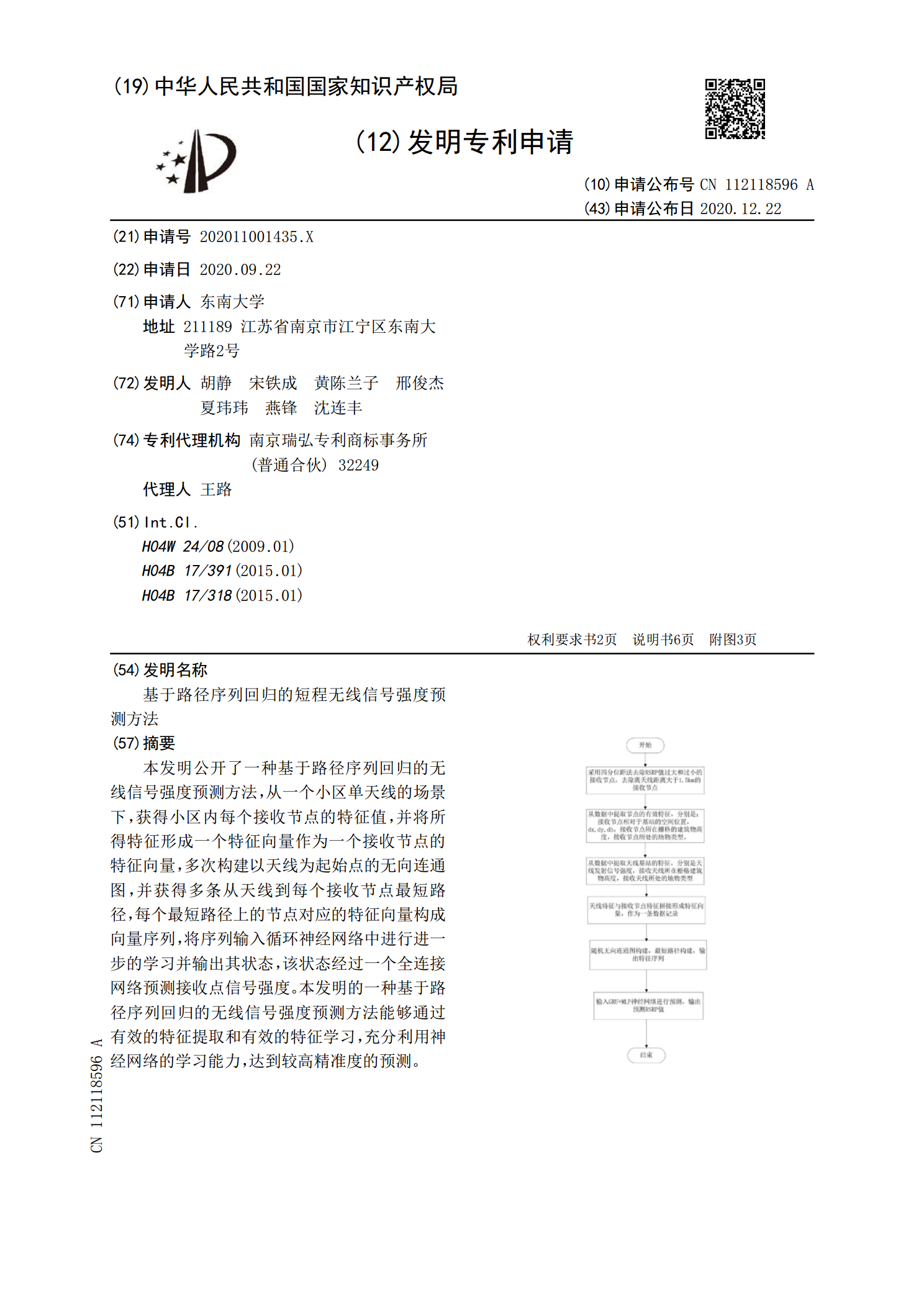
本发明公开了一种基于路径序列回归的无线信号强度预测方法,从一个小区单天线的场景下,获得小区内每个接收节点的特征值,并将所得特征形成一个特征向量作为一个接收节点的特征向量,多次构建以天线为起始点的无向连通图,并获得多条从天线到每个接收节点最短路径,每个最短路径上的节点对应的特征向量构成向量序列,将序列输入循环神经网络中进行进一步的学习并输出其状态,该状态经过一个全连接网络预测接收点信号强度。本发明的一种基于路径序列回归的无线信号强度预测方法能够通过有效的特征提取和有效的特征学习,充分利用神经网络的学习能力,
基于无线信号强度变化的移动机器人回归路径规划方法.pdf
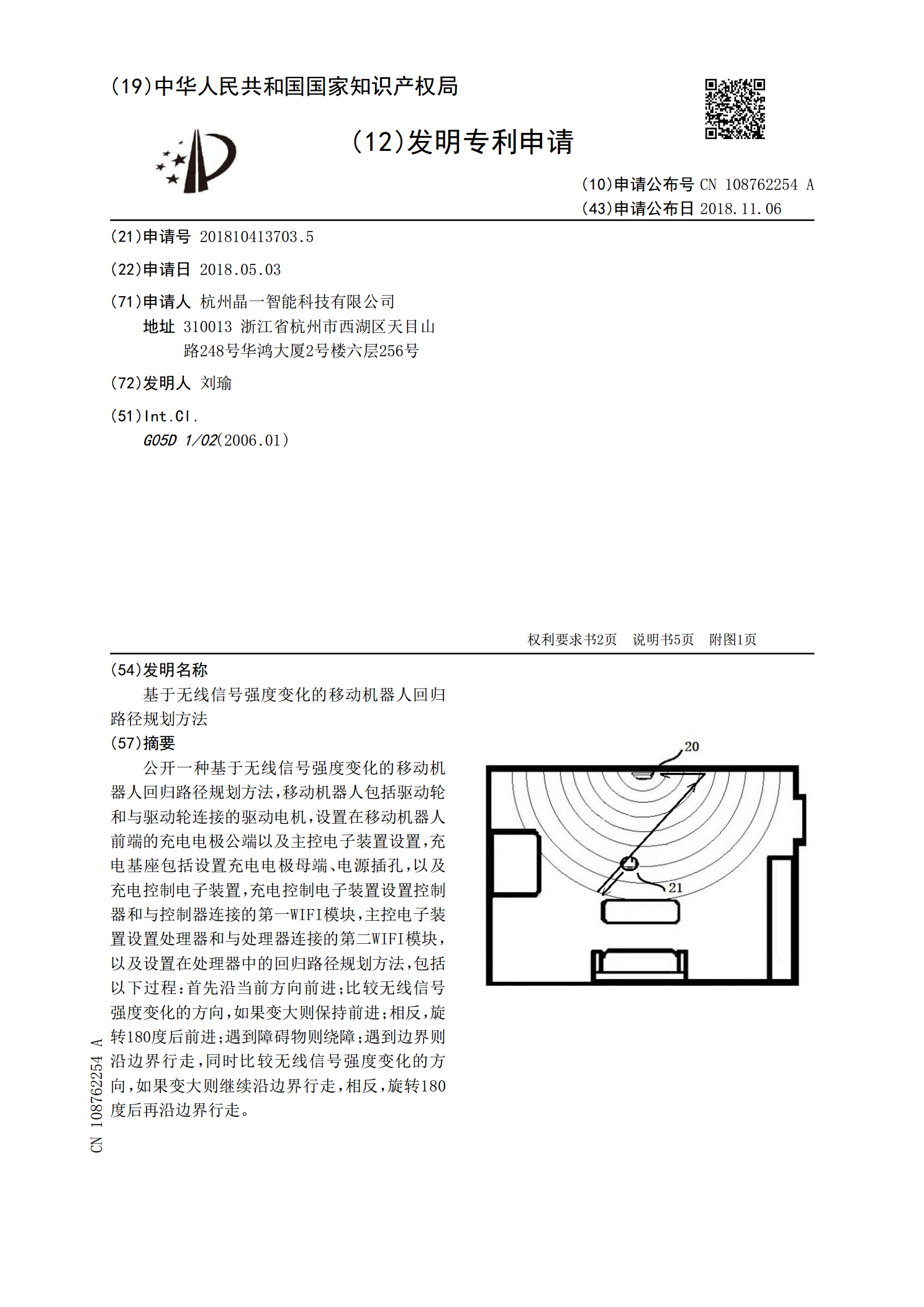
公开一种基于无线信号强度变化的移动机器人回归路径规划方法,移动机器人包括驱动轮和与驱动轮连接的驱动电机,设置在移动机器人前端的充电电极公端以及主控电子装置设置,充电基座包括设置充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第一WIFI模块,主控电子装置设置处理器和与处理器连接的第二WIFI模块,以及设置在处理器中的回归路径规划方法,包括以下过程:首先沿当前方向前进;比较无线信号强度变化的方向,如果变大则保持前进;相反,旋转180度后前进;遇到障碍物则绕障;遇到边界
基于无线信号强度的割草机器人遍历路径规划方法.pdf
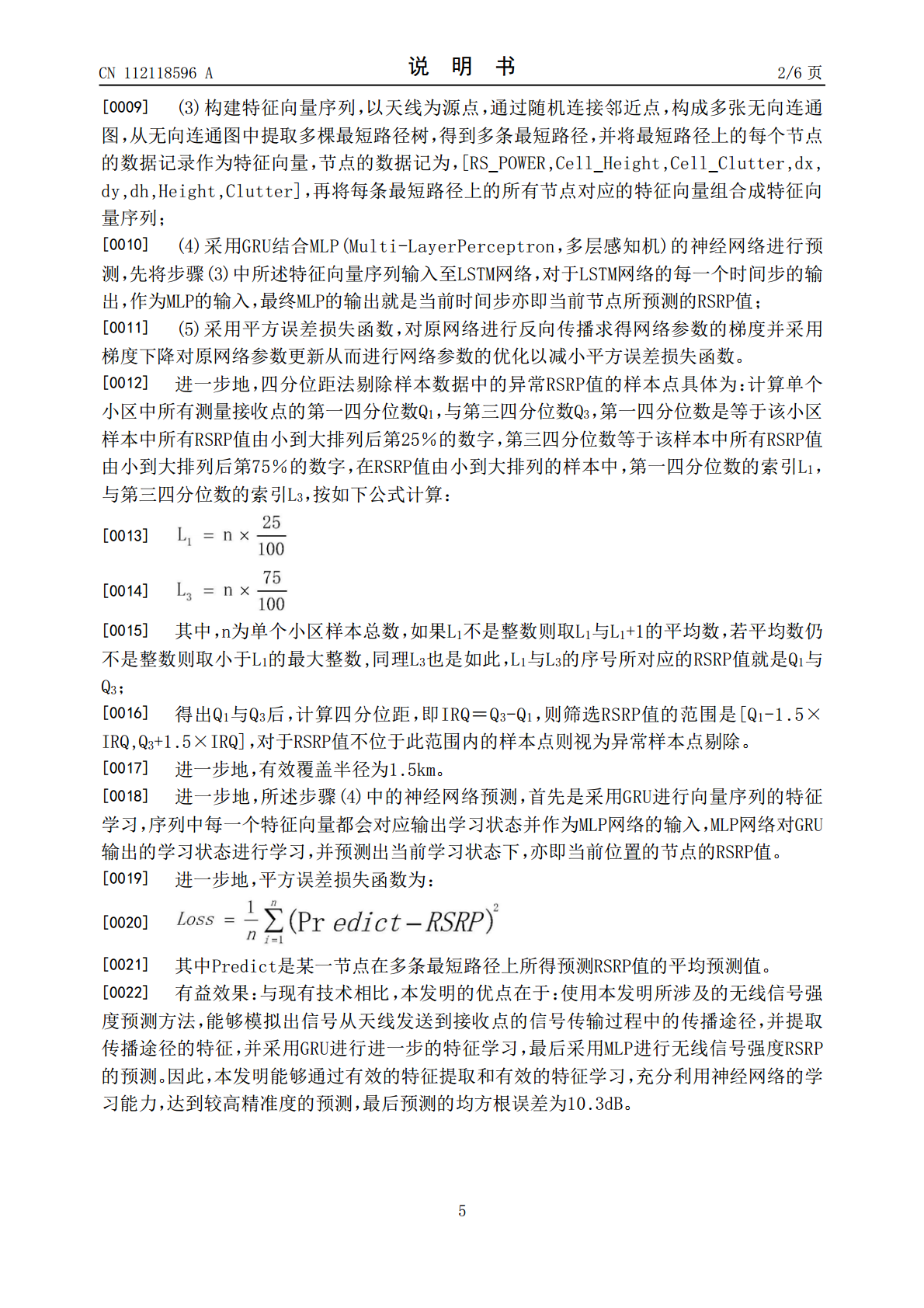
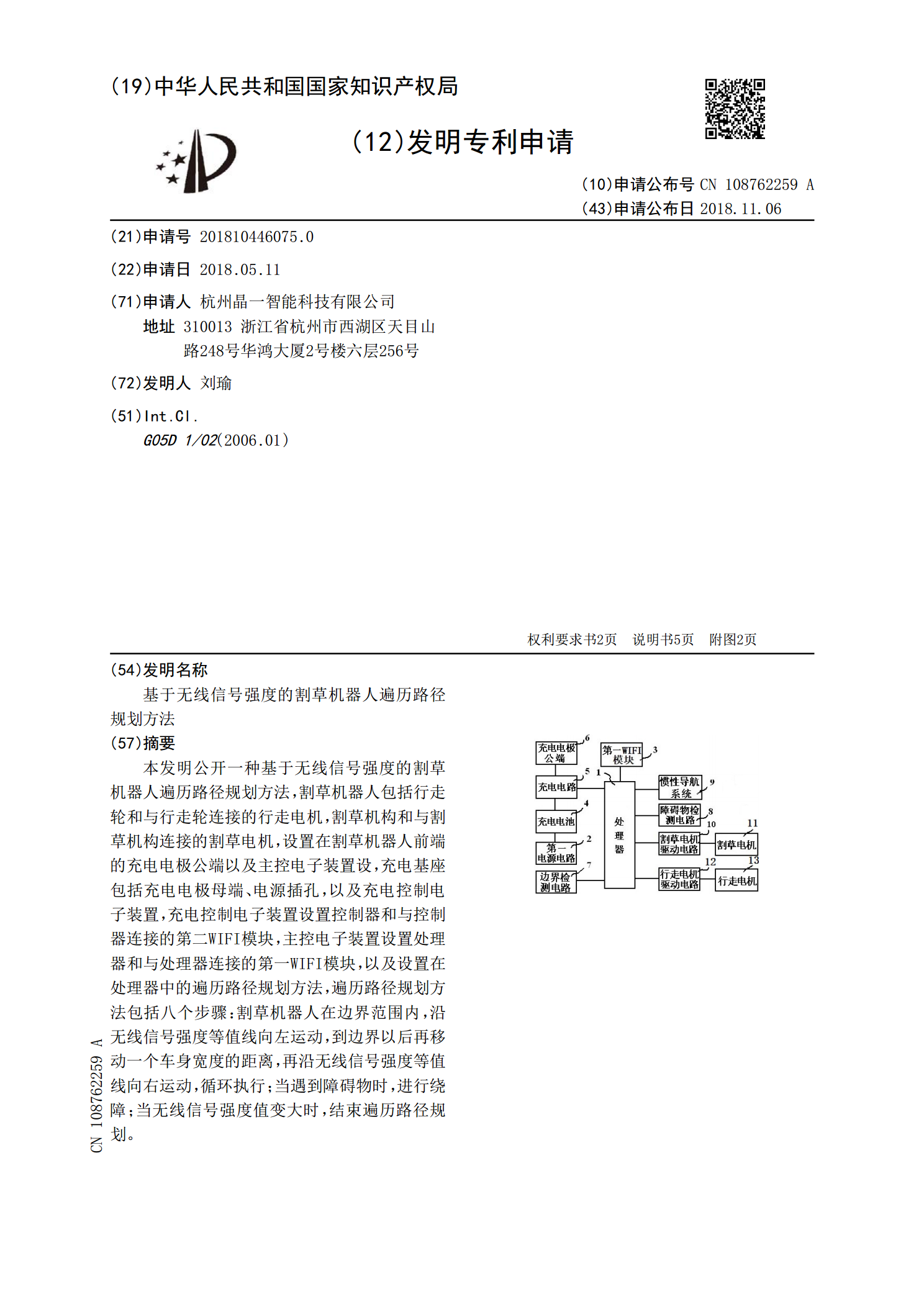
本发明公开一种基于无线信号强度的割草机器人遍历路径规划方法,割草机器人包括行走轮和与行走轮连接的行走电机,割草机构和与割草机构连接的割草电机,设置在割草机器人前端的充电电极公端以及主控电子装置设,充电基座包括充电电极母端、电源插孔,以及充电控制电子装置,充电控制电子装置设置控制器和与控制器连接的第二WIFI模块,主控电子装置设置处理器和与处理器连接的第一WIFI模块,以及设置在处理器中的遍历路径规划方法,遍历路径规划方法包括八个步骤:割草机器人在边界范围内,沿无线信号强度等值线向左运动,到边界以后再移动一

基于异方差的递增时间序列自回归预测的改善方法.docx
基于异方差的递增时间序列自回归预测的改善方法基于异方差的递增时间序列自回归预测的改善方法时间序列是指一系列按照时间顺序排列的均匀间隔的数据点,它在多个领域中都有着广泛的应用。时间序列预测是对未来时间点进行预测的过程,是统计学和计算机科学的重要研究方向。自回归模型是一个广泛使用的工具,它能够将时间序列与过去的观测值联系起来,以进行预测。然而,在实际应用中,时间序列的数据通常呈现出异方差性,即方差不恒定,而是在不同的时间段内具有不同的方差。因此,传统的自回归模型无法准确地预测这种类型的时间序列。为了解决这个问

基于相关向量回归的非线性时间序列预测方法.docx
基于相关向量回归的非线性时间序列预测方法1.引言时间序列预测在许多领域都有广泛应用,例如金融、交通、气象等。针对时间序列的特点,许多线性和非线性模型已经被提出来,各有优缺点。在本文中,我们将介绍一种基于相关向量回归的非线性时间序列预测方法。2.相关向量回归介绍相关向量回归(CVR)是一种非线性回归方法,它基于支持向量机(SVM)理论,利用核函数将输入样本映射到高维空间,并在高维空间中寻找最优超平面,以实现分类或回归的目标。在CV中,每个样本的扩展表示形式被称为相关向量,因为其他样本到当前样本的距离被表示为