
轮式装载机以及轮式装载机的控制方法.pdf

一吃****天材

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轮式装载机以及轮式装载机的控制方法.pdf
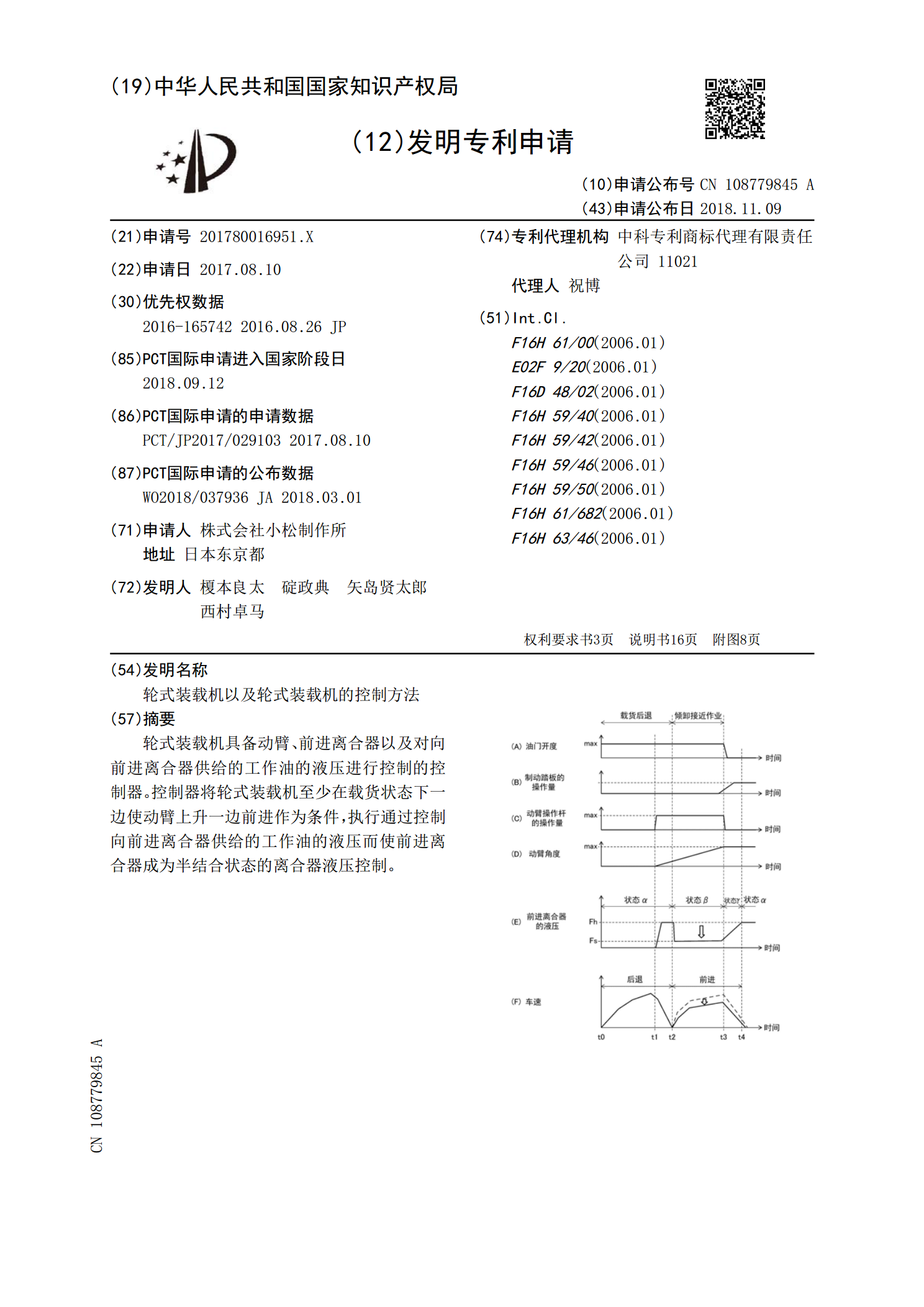
轮式装载机具备动臂、前进离合器以及对向前进离合器供给的工作油的液压进行控制的控制器。控制器将轮式装载机至少在载货状态下一边使动臂上升一边前进作为条件,执行通过控制向前进离合器供给的工作油的液压而使前进离合器成为半结合状态的离合器液压控制。
轮式装载机以及轮式装载机的控制方法.pdf
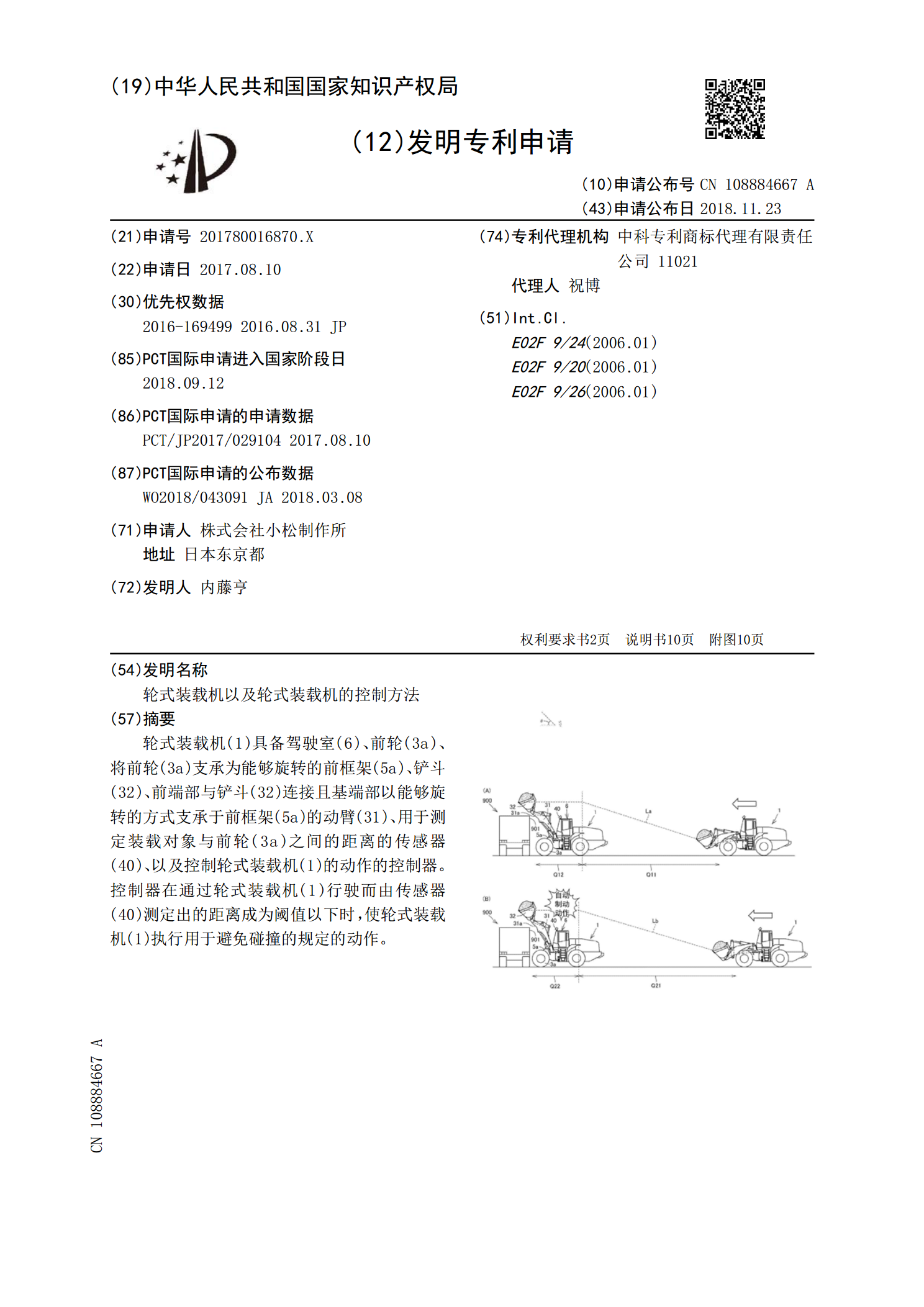
轮式装载机(1)具备驾驶室(6)、前轮(3a)、将前轮(3a)支承为能够旋转的前框架(5a)、铲斗(32)、前端部与铲斗(32)连接且基端部以能够旋转的方式支承于前框架(5a)的动臂(31)、用于测定装载对象与前轮(3a)之间的距离的传感器(40)、以及控制轮式装载机(1)的动作的控制器。控制器在通过轮式装载机(1)行驶而由传感器(40)测定出的距离成为阈值以下时,使轮式装载机(1)执行用于避免碰撞的规定的动作。
轮式装载机以及轮式装载机的控制方法.pdf
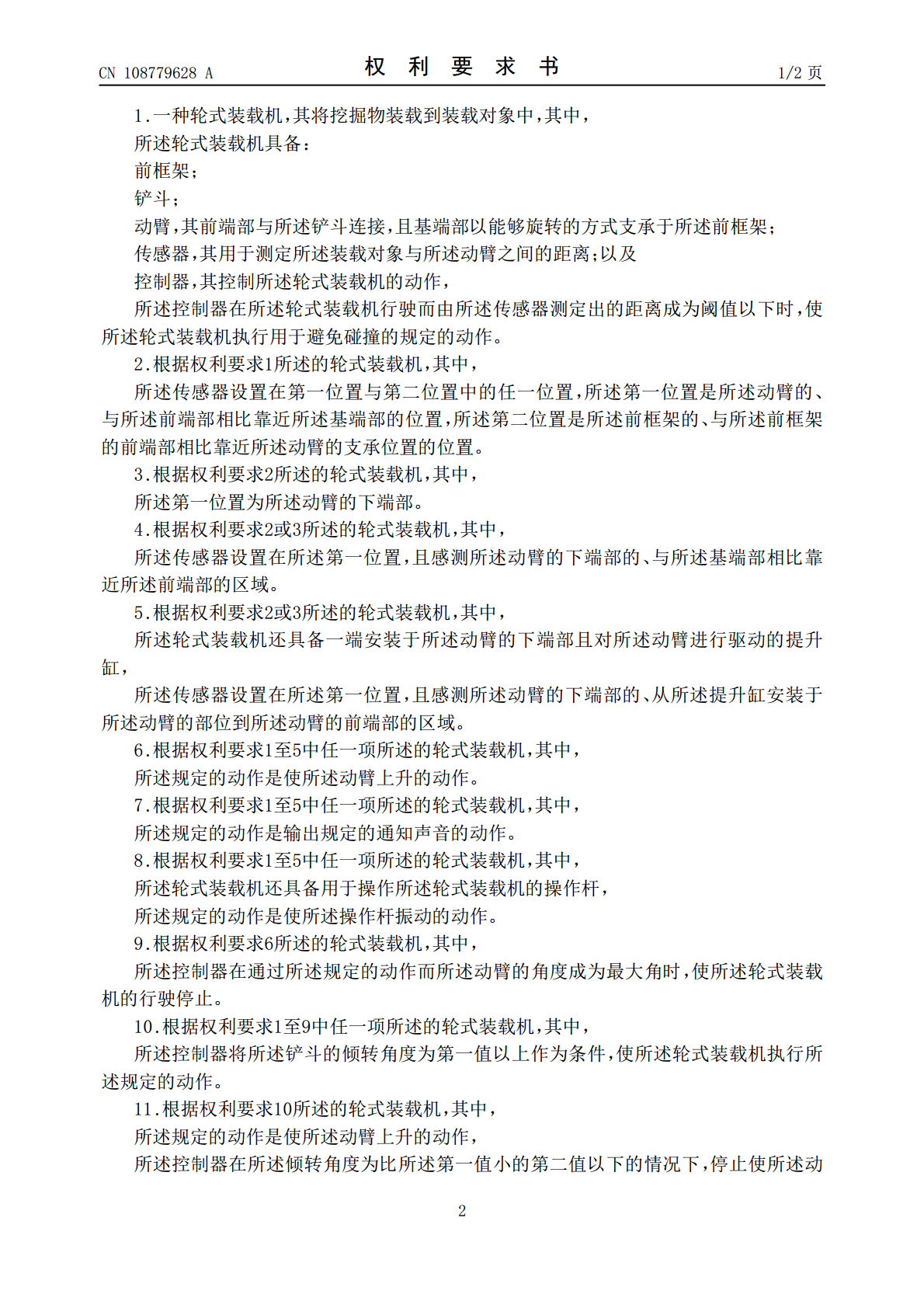
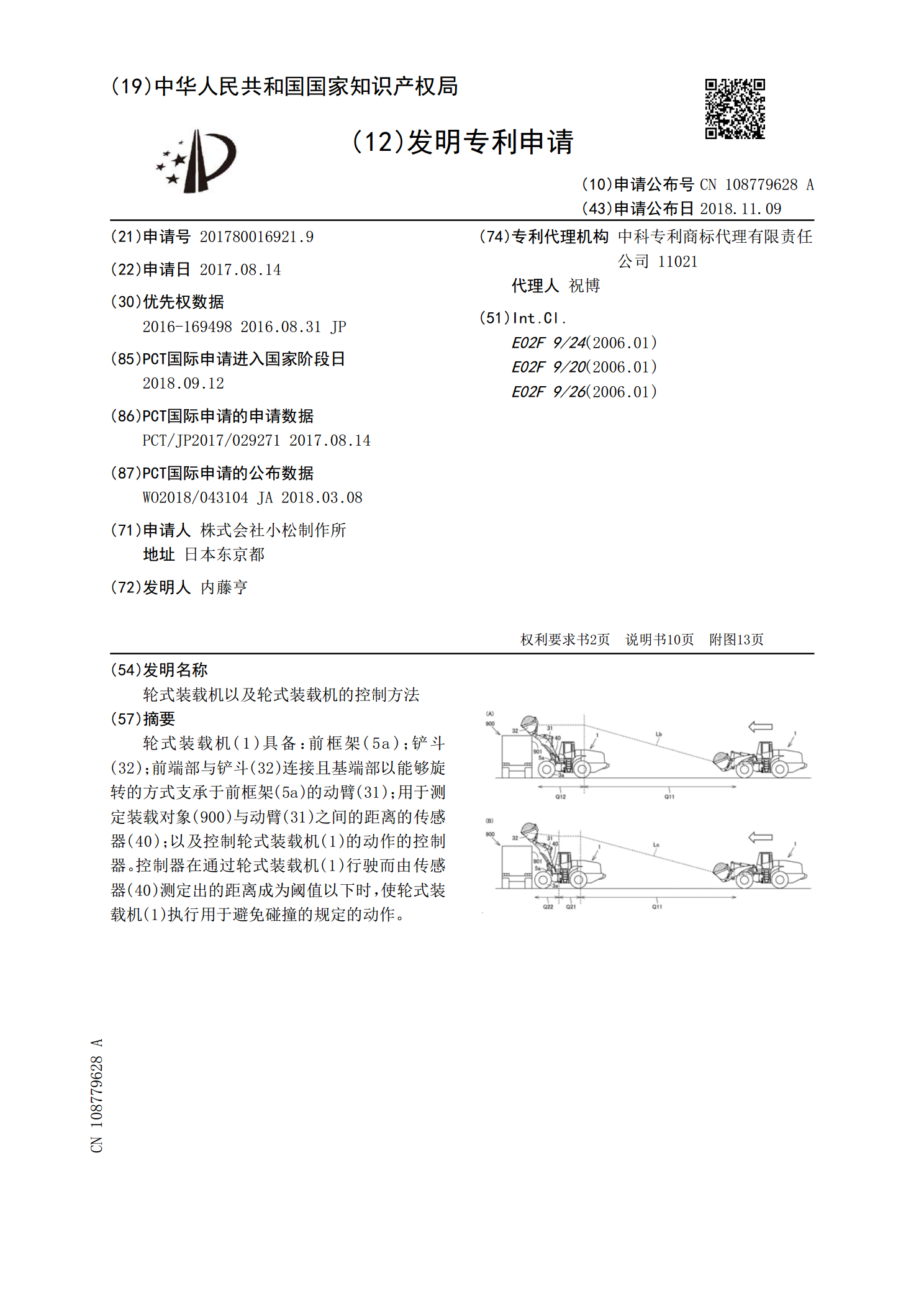
轮式装载机(1)具备:前框架(5a);铲斗(32);前端部与铲斗(32)连接且基端部以能够旋转的方式支承于前框架(5a)的动臂(31);用于测定装载对象(900)与动臂(31)之间的距离的传感器(40);以及控制轮式装载机(1)的动作的控制器。控制器在通过轮式装载机(1)行驶而由传感器(40)测定出的距离成为阈值以下时,使轮式装载机(1)执行用于避免碰撞的规定的动作。
轮式装载机、轮式装载机的控制方法以及轮式装载机的控制系统.pdf
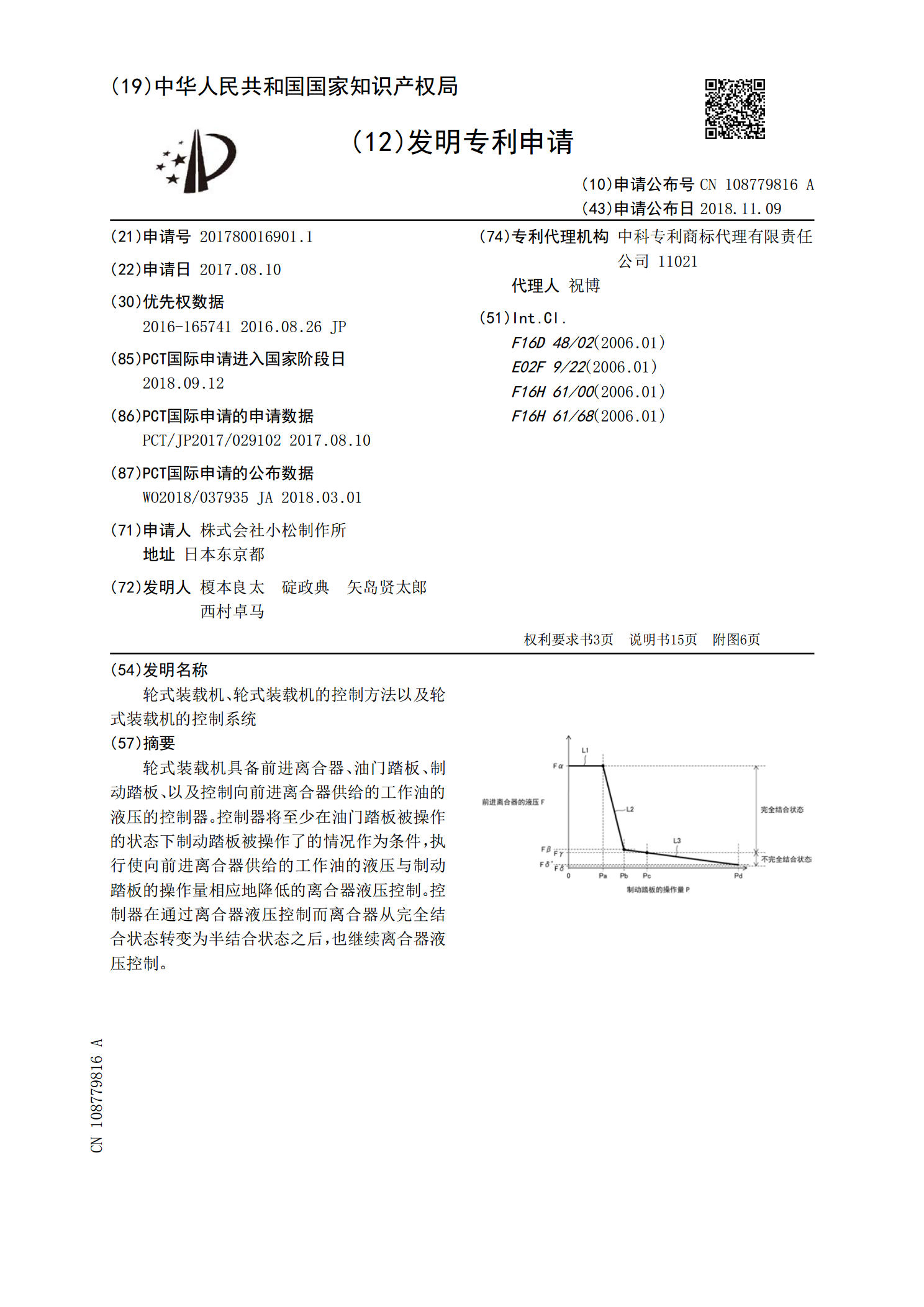
轮式装载机具备前进离合器、油门踏板、制动踏板、以及控制向前进离合器供给的工作油的液压的控制器。控制器将至少在油门踏板被操作的状态下制动踏板被操作了的情况作为条件,执行使向前进离合器供给的工作油的液压与制动踏板的操作量相应地降低的离合器液压控制。控制器在通过离合器液压控制而离合器从完全结合状态转变为半结合状态之后,也继续离合器液压控制。

轮式装载机的控制系统、其控制方法以及轮式装载机的控制方法.pdf
一种作业车辆的控制系统,具备:显示部;以及控制部,其将透射轮式装载机的工作装置或装载对象车辆的货箱的至少一部分得到的透射图像显示于显示部。