
一种电液混合驱动的工业机器人结构及控制系统.pdf

霞英****娘子

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种电液混合驱动的工业机器人结构及控制系统.pdf
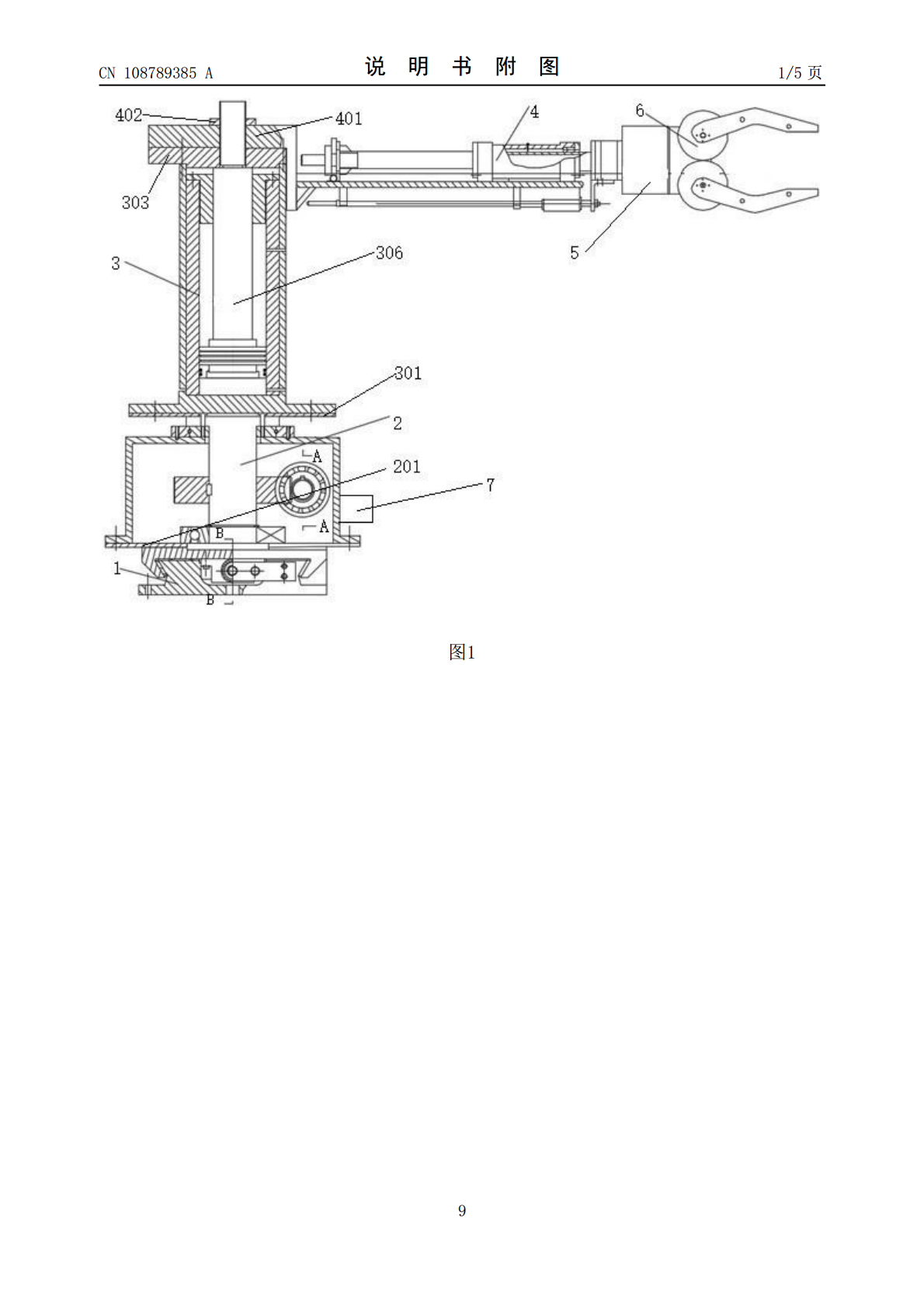
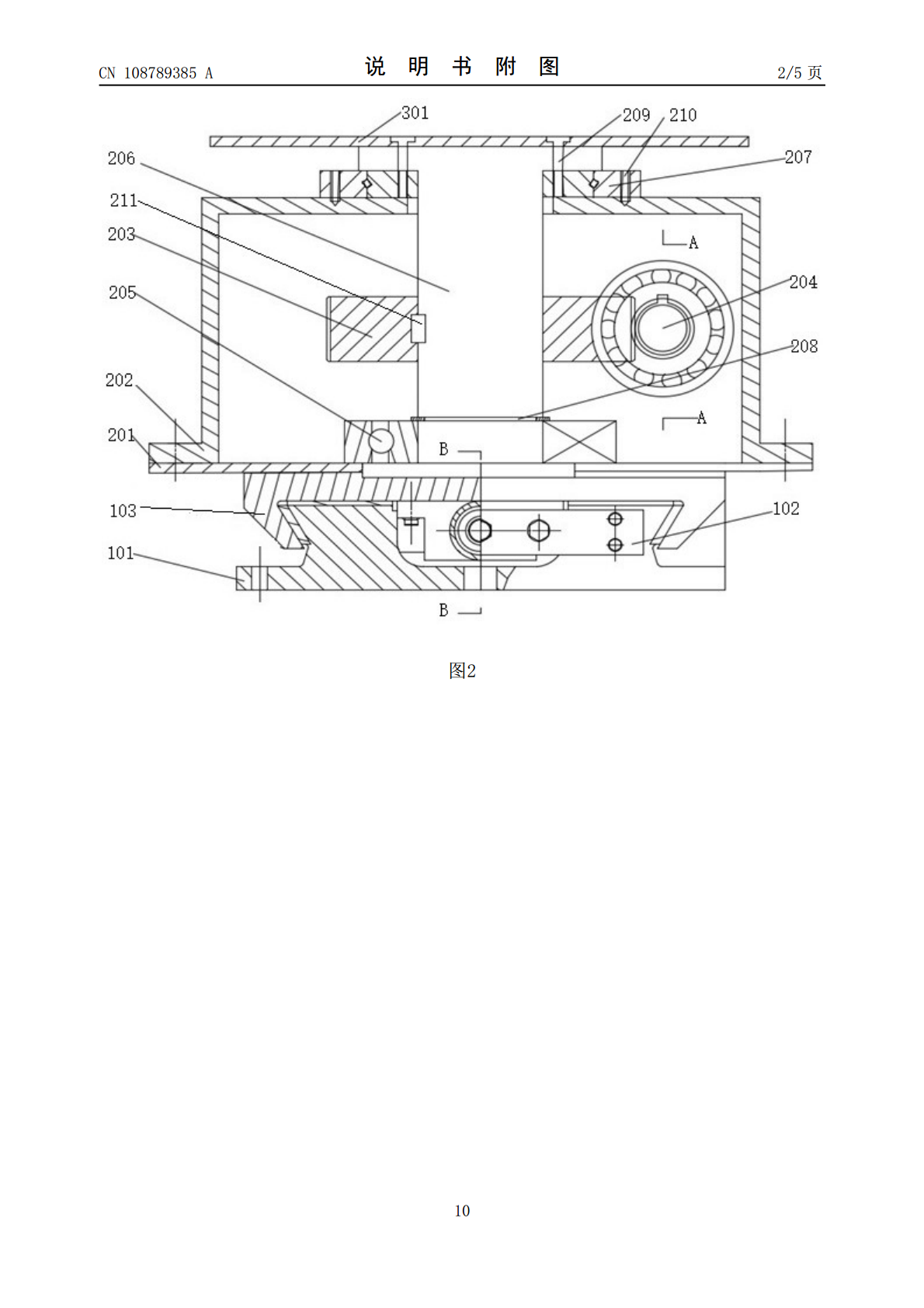
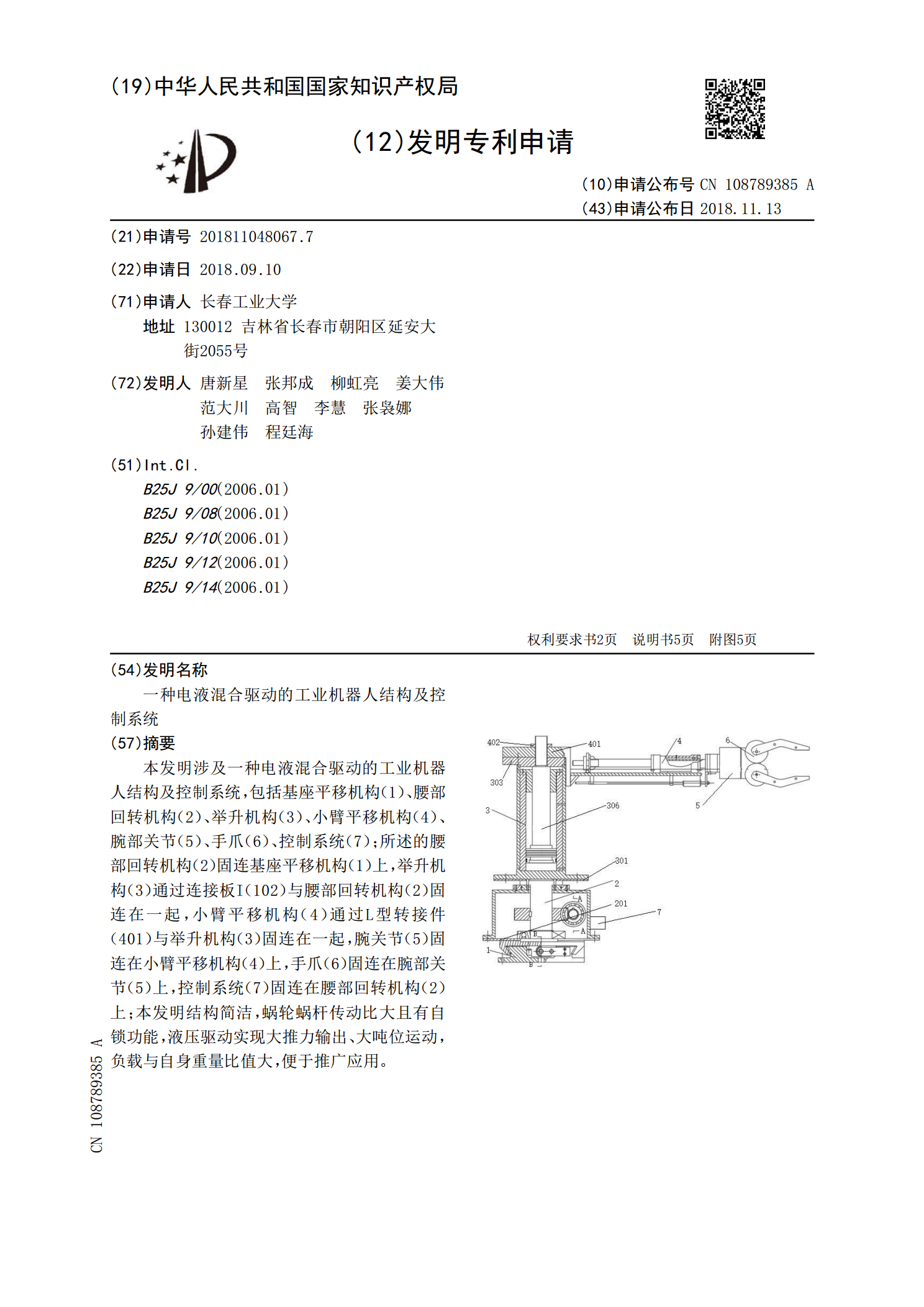
本发明涉及一种电液混合驱动的工业机器人结构及控制系统,包括基座平移机构(1)、腰部回转机构(2)、举升机构(3)、小臂平移机构(4)、腕部关节(5)、手爪(6)、控制系统(7);所述的腰部回转机构(2)固连基座平移机构(1)上,举升机构(3)通过连接板I(102)与腰部回转机构(2)固连在一起,小臂平移机构(4)通过L型转接件(401)与举升机构(3)固连在一起,腕关节(5)固连在小臂平移机构(4)上,手爪(6)固连在腕部关节(5)上,控制系统(7)固连在腰部回转机构(2)上;本发明结构简洁,蜗轮蜗杆传动
一种基于电液混合驱动的轮足切换机器人及控制系统.pdf
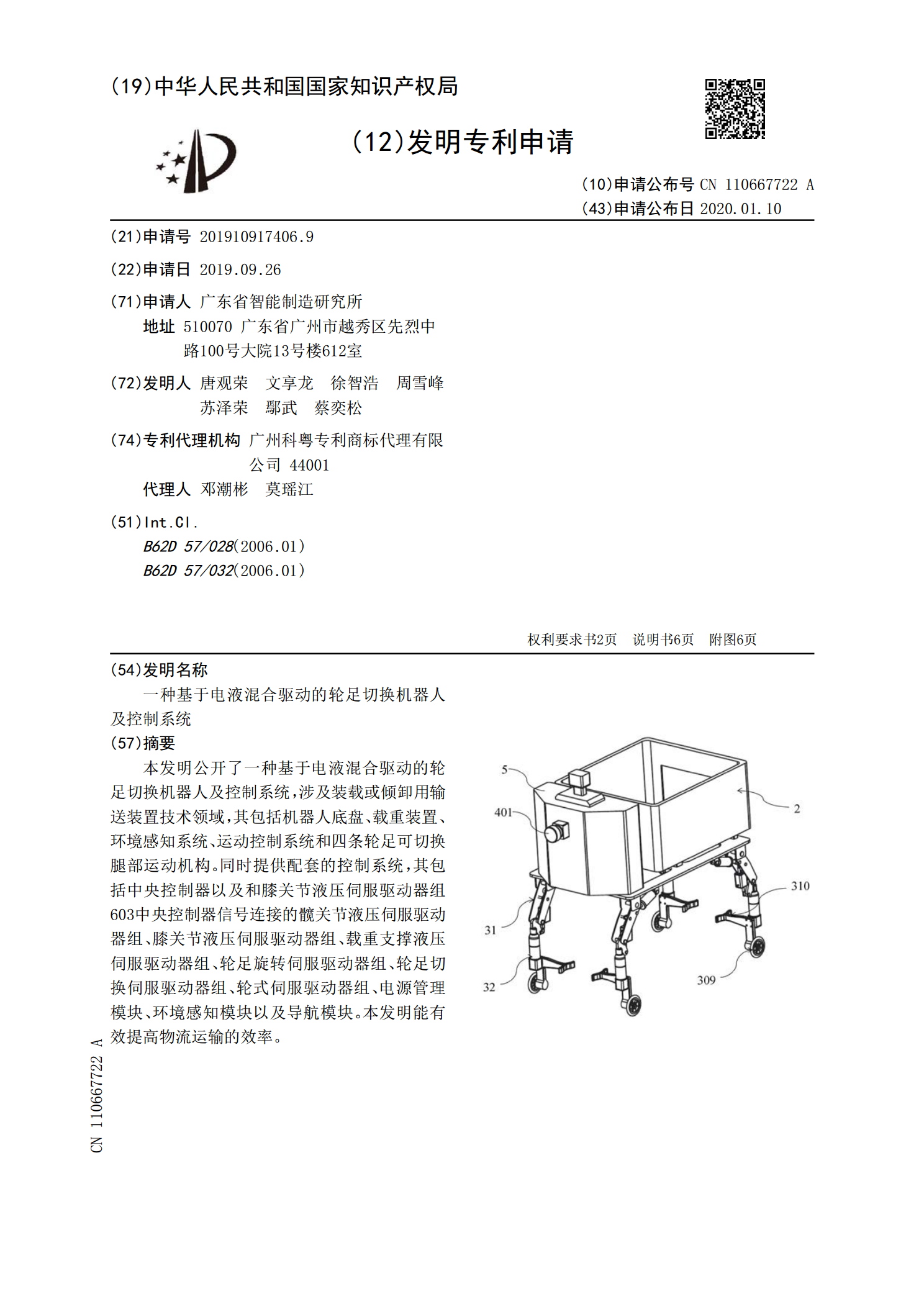
本发明公开了一种基于电液混合驱动的轮足切换机器人及控制系统,涉及装载或倾卸用输送装置技术领域,其包括机器人底盘、载重装置、环境感知系统、运动控制系统和四条轮足可切换腿部运动机构。同时提供配套的控制系统,其包括中央控制器以及和膝关节液压伺服驱动器组603中央控制器信号连接的髋关节液压伺服驱动器组、膝关节液压伺服驱动器组、载重支撑液压伺服驱动器组、轮足旋转伺服驱动器组、轮足切换伺服驱动器组、轮式伺服驱动器组、电源管理模块、环境感知模块以及导航模块。本发明能有效提高物流运输的效率。

工业机器人的结构、驱动及控制系统.docx
工业机器人的结构、驱动及控制系统一、常用运动学构形1、笛卡尔操作臂优点:很容易通过计算机控制实现,容易达到高精度。缺点:妨碍工作,且占地面积大,运动速度低,密封性不好。①焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂、目标跟随、排爆等一系列工作。②特别适用于多品种,便批量的柔性化作业,对于稳定,提高产品质量,提高劳动生产率,改善劳动条件和产品的快速更新换代有着十分重要的作用。2、铰链型操作臂(关节型)关节机器人的关节全都是旋转的,类似于人的手臂,工业机器人中
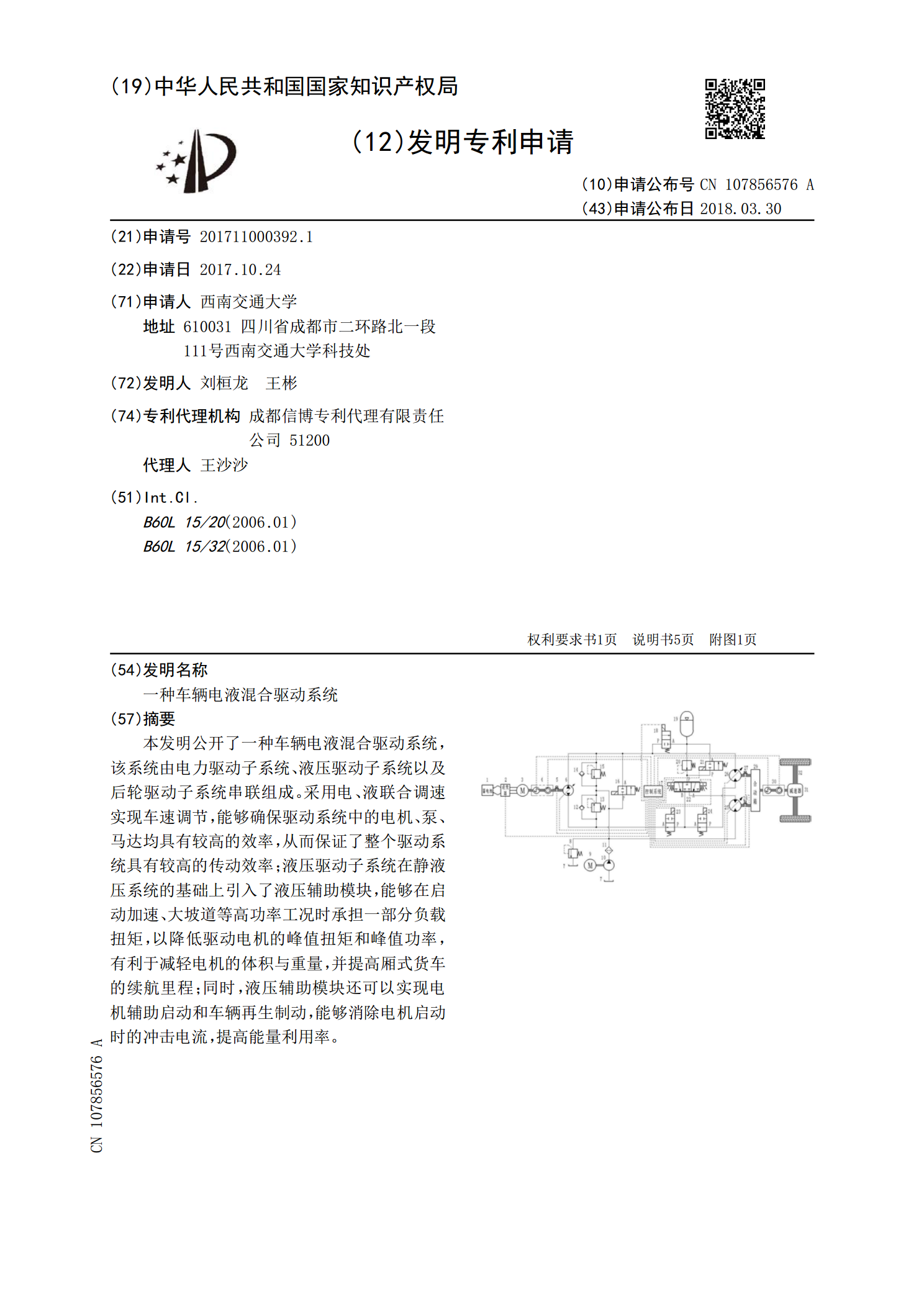
一种车辆电液混合驱动系统.pdf
本发明公开了一种车辆电液混合驱动系统,该系统由电力驱动子系统、液压驱动子系统以及后轮驱动子系统串联组成。采用电、液联合调速实现车速调节,能够确保驱动系统中的电机、泵、马达均具有较高的效率,从而保证了整个驱动系统具有较高的传动效率;液压驱动子系统在静液压系统的基础上引入了液压辅助模块,能够在启动加速、大坡道等高功率工况时承担一部分负载扭矩,以降低驱动电机的峰值扭矩和峰值功率,有利于减轻电机的体积与重量,并提高厢式货车的续航里程;同时,液压辅助模块还可以实现电机辅助启动和车辆再生制动,能够消除电机启动时的冲击
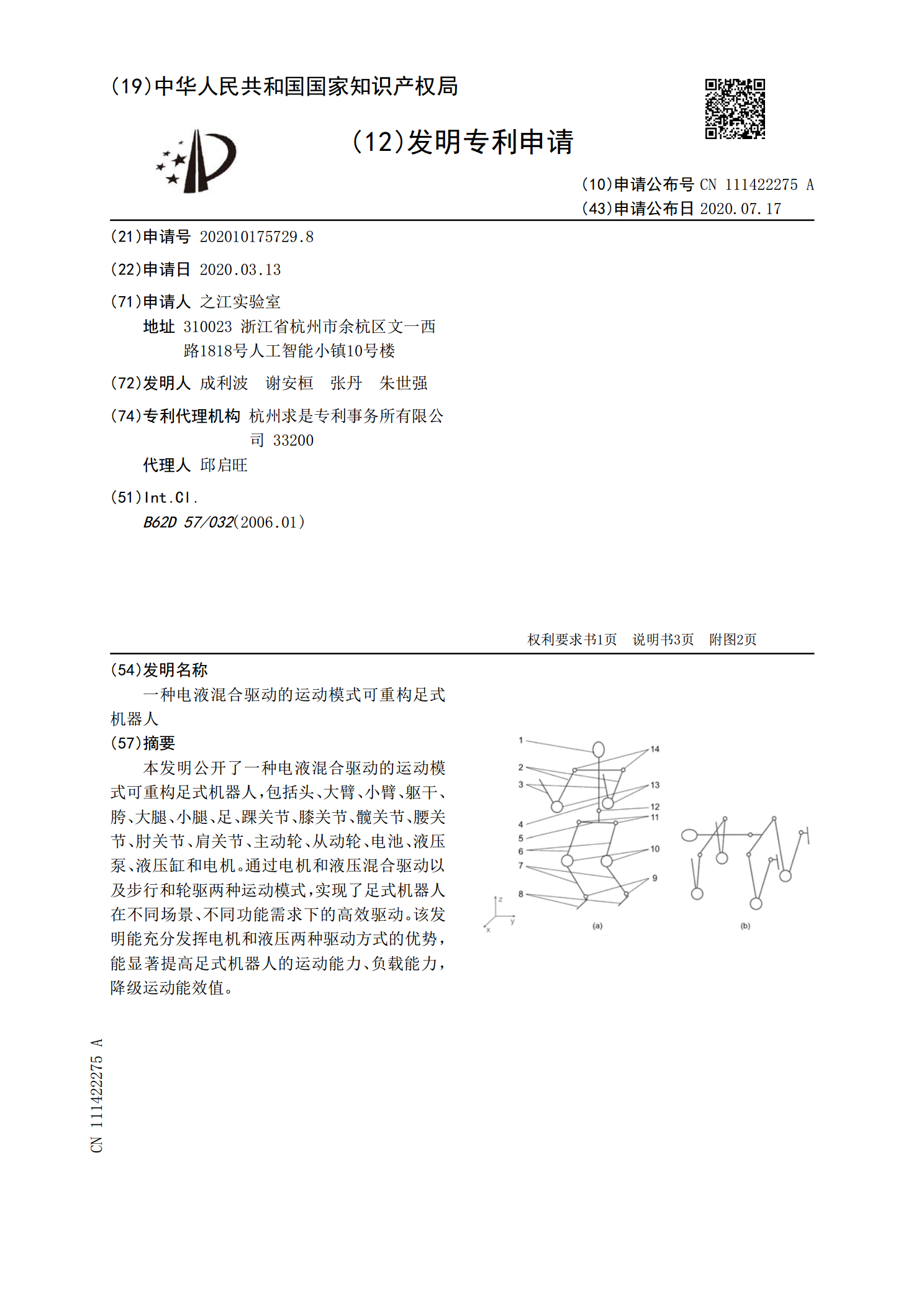
一种电液混合驱动的运动模式可重构足式机器人.pdf
本发明公开了一种电液混合驱动的运动模式可重构足式机器人,包括头、大臂、小臂、躯干、胯、大腿、小腿、足、踝关节、膝关节、髋关节、腰关节、肘关节、肩关节、主动轮、从动轮、电池、液压泵、液压缸和电机。通过电机和液压混合驱动以及步行和轮驱两种运动模式,实现了足式机器人在不同场景、不同功能需求下的高效驱动。该发明能充分发挥电机和液压两种驱动方式的优势,能显著提高足式机器人的运动能力、负载能力,降级运动能效值。