
工业机器人的结构、驱动及控制系统.docx

胜利****实阿


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

工业机器人的结构、驱动及控制系统.docx
工业机器人的结构、驱动及控制系统一、常用运动学构形1、笛卡尔操作臂优点:很容易通过计算机控制实现,容易达到高精度。缺点:妨碍工作,且占地面积大,运动速度低,密封性不好。①焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂、目标跟随、排爆等一系列工作。②特别适用于多品种,便批量的柔性化作业,对于稳定,提高产品质量,提高劳动生产率,改善劳动条件和产品的快速更新换代有着十分重要的作用。2、铰链型操作臂(关节型)关节机器人的关节全都是旋转的,类似于人的手臂,工业机器人中
一种电液混合驱动的工业机器人结构及控制系统.pdf
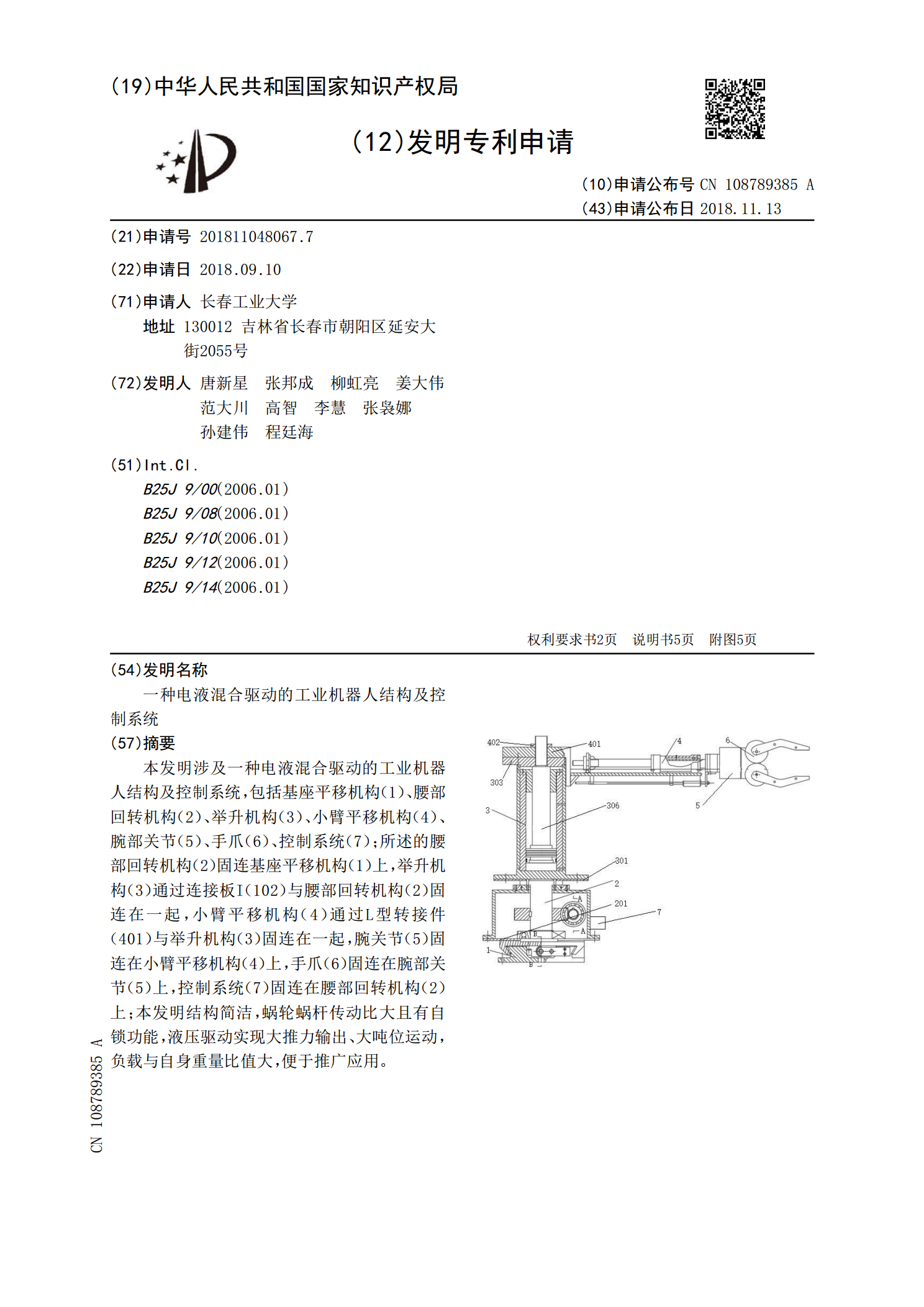
本发明涉及一种电液混合驱动的工业机器人结构及控制系统,包括基座平移机构(1)、腰部回转机构(2)、举升机构(3)、小臂平移机构(4)、腕部关节(5)、手爪(6)、控制系统(7);所述的腰部回转机构(2)固连基座平移机构(1)上,举升机构(3)通过连接板I(102)与腰部回转机构(2)固连在一起,小臂平移机构(4)通过L型转接件(401)与举升机构(3)固连在一起,腕关节(5)固连在小臂平移机构(4)上,手爪(6)固连在腕部关节(5)上,控制系统(7)固连在腰部回转机构(2)上;本发明结构简洁,蜗轮蜗杆传动

工业机器人典型控制系统及结构.docx
工业机器人典型控制系统及结构工业机器人由主体、驱动系统和控制系统三个基本部分组成。主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度。驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作。控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。今天小编先和大家聊聊控制系统!1.工业机器人控制系统所要达到的功能机器人控制系统是机器人的重要组成部分,用于对操作机的控制,以完成特定的工作任务,其基本功能

工业机器人用伺服电机驱动控制系统研究.docx
工业机器人用伺服电机驱动控制系统研究工业机器人是一种应用广泛的自动化设备,用于在工业生产中完成各种工作任务。伺服电机作为工业机器人的关键驱动元件之一,在工业机器人的控制系统中起着至关重要的作用。本文旨在研究工业机器人用伺服电机驱动控制系统的原理、特点和应用,并探讨其在未来发展中的趋势。一、伺服电机的原理和特点伺服电机是一种可以在一个或多个自变量的控制下保持一定规律运动的电动机。它通过传感器来测量输出运动状态,并通过反馈系统将其与输入控制信号进行比较,从而控制电机的运动。伺服电机具有以下特点:1.精确控制:

工业机器人技术基础56工业机器人的驱动装置-气动驱动(4).pptx
工业机器人的驱动装置——气动驱动式主要内容一、气动驱动式的特点二、气动驱动装置结构三、气驱动式手爪三、气驱动式手爪三、气驱动式手爪