
停车AGV与汽车的对接定位方法及停车AGV.pdf

慧颖****23


1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
停车AGV与汽车的对接定位方法及停车AGV.pdf
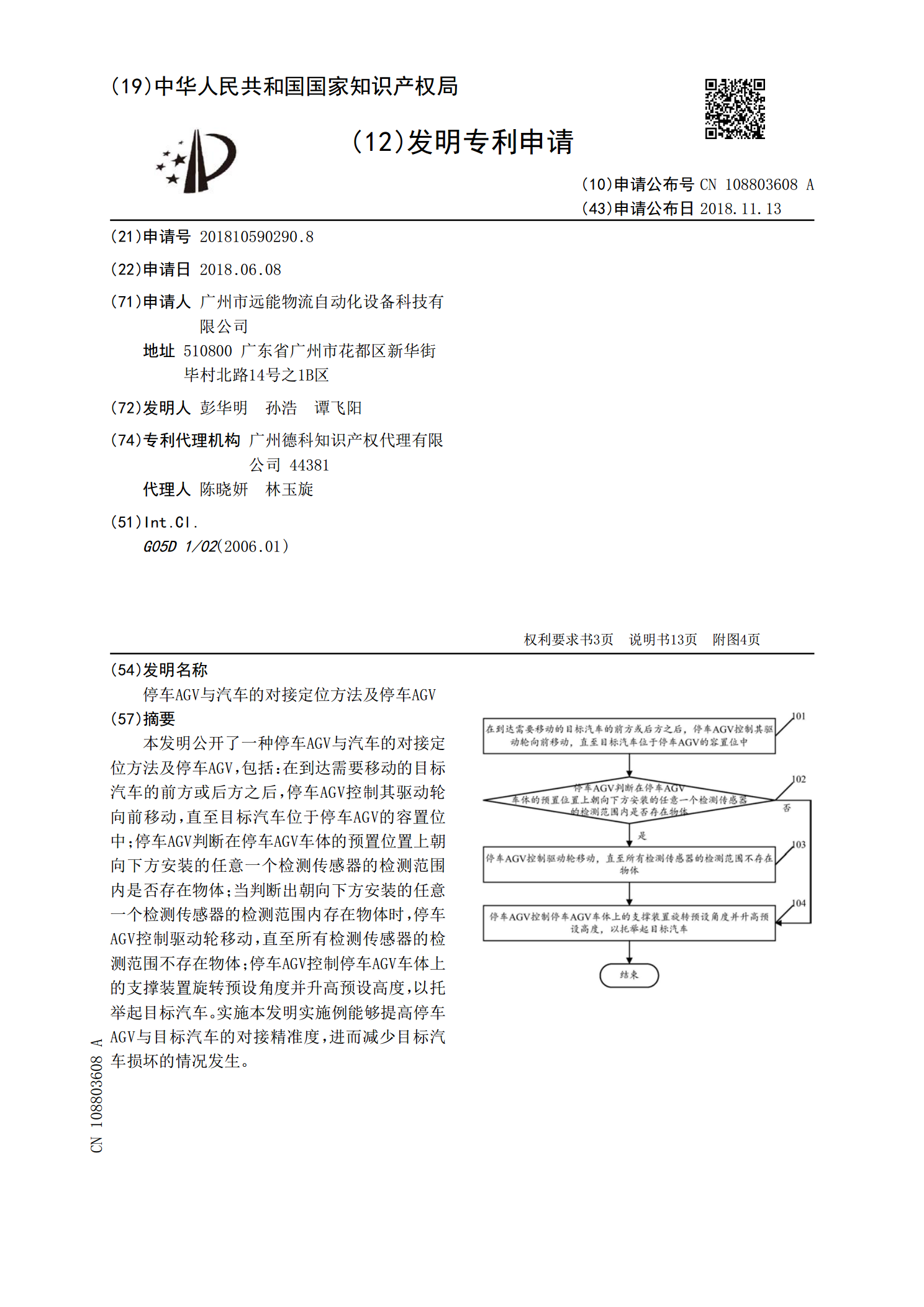
本发明公开了一种停车AGV与汽车的对接定位方法及停车AGV,包括:在到达需要移动的目标汽车的前方或后方之后,停车AGV控制其驱动轮向前移动,直至目标汽车位于停车AGV的容置位中;停车AGV判断在停车AGV车体的预置位置上朝向下方安装的任意一个检测传感器的检测范围内是否存在物体;当判断出朝向下方安装的任意一个检测传感器的检测范围内存在物体时,停车AGV控制驱动轮移动,直至所有检测传感器的检测范围不存在物体;停车AGV控制停车AGV车体上的支撑装置旋转预设角度并升高预设高度,以托举起目标汽车。实施本发明实施例
一种液压升降式停车AGV、停车AGV系统及停车方法.pdf
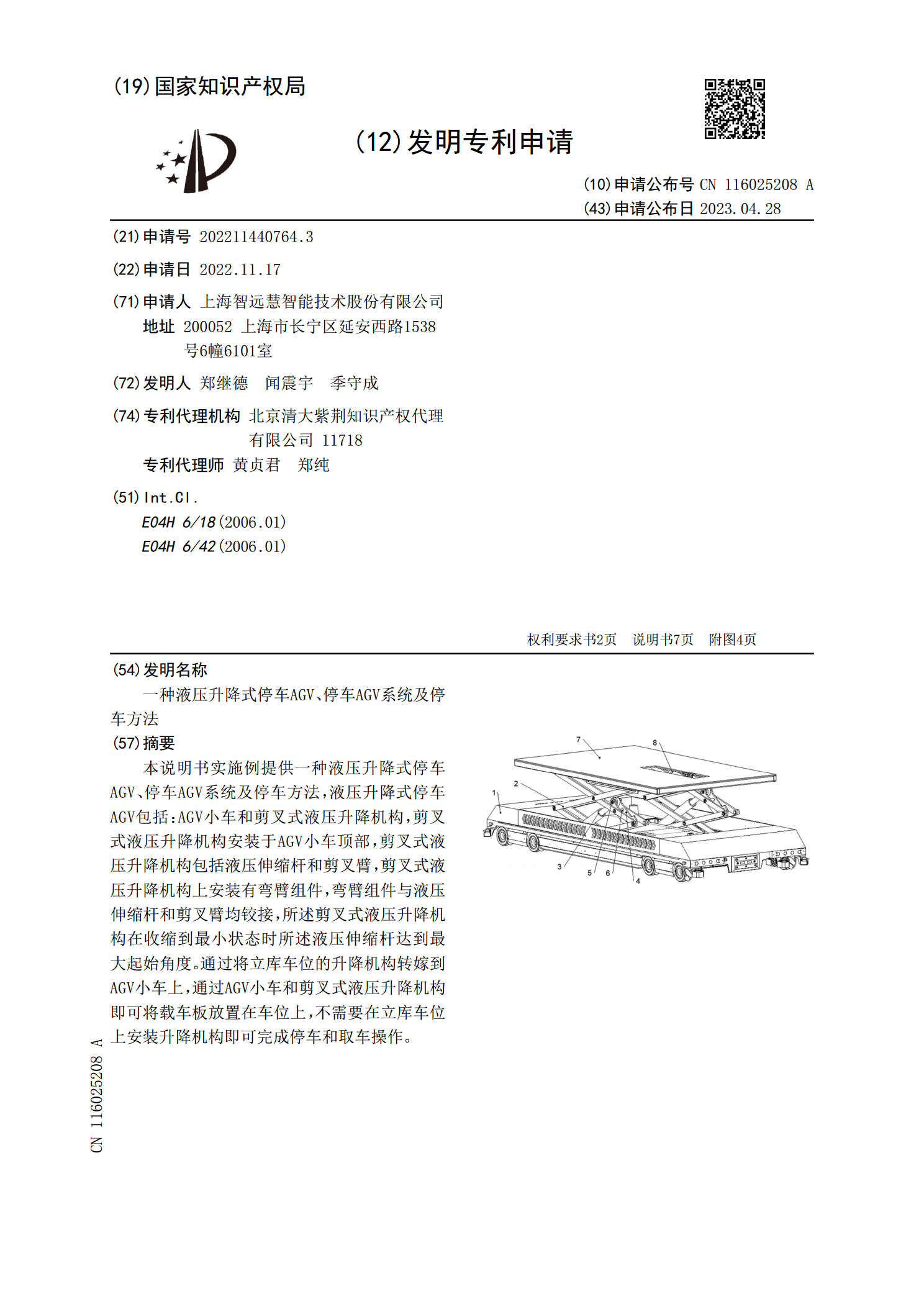
本说明书实施例提供一种液压升降式停车AGV、停车AGV系统及停车方法,液压升降式停车AGV包括:AGV小车和剪叉式液压升降机构,剪叉式液压升降机构安装于AGV小车顶部,剪叉式液压升降机构包括液压伸缩杆和剪叉臂,剪叉式液压升降机构上安装有弯臂组件,弯臂组件与液压伸缩杆和剪叉臂均铰接,所述剪叉式液压升降机构在收缩到最小状态时所述液压伸缩杆达到最大起始角度。通过将立库车位的升降机构转嫁到AGV小车上,通过AGV小车和剪叉式液压升降机构即可将载车板放置在车位上,不需要在立库车位上安装升降机构即可完成停车和取车操作

三轮无轨AGV定位停车控制方法.pdf
本发明公开了一种三轮无轨AGV定位停车控制方法,其特征是首先使AGV转过角度α1,车体到达法向误差的中心位置pm,消除法向位置误差Δd的1/2;然后将AGV向相反的方向转过角度α2,使AGV运行到与预定停车方位角相同的第二位置pe,又一次消除法向位置误差Δd的1/2,剩余为切向位置误差Δt;最后通过判断预定停车位姿P′与第二位置Pe的位置关系,使AGV前进或后退以消除切向位置误差Δt,到达预定停车位置P′。本发明能够更好地保证三轮无轨AGV的控制精度以及实现快速到达目标位姿的目的。
一种无轨导航AGV的精确定位及停车方法.pdf
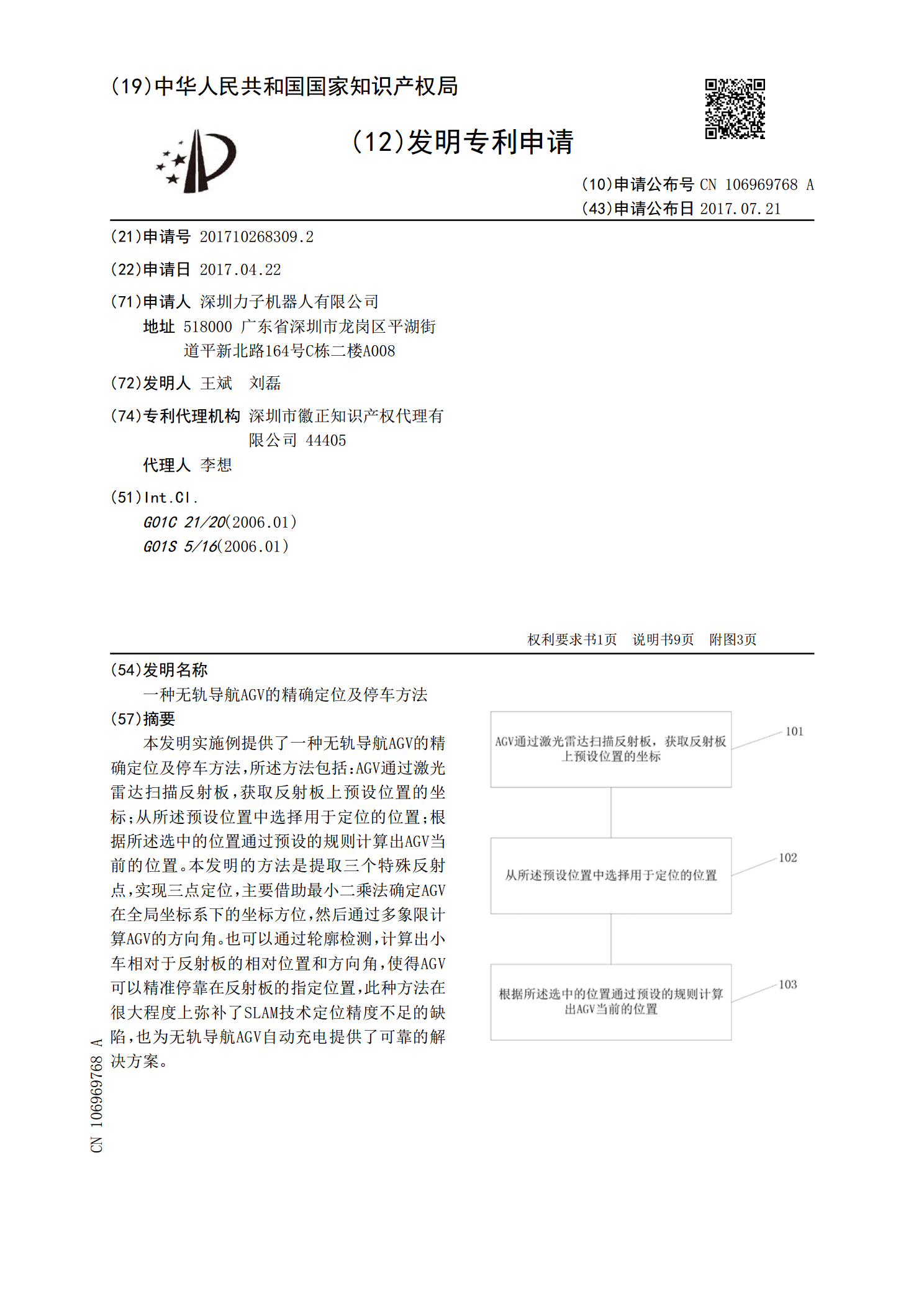
本发明实施例提供了一种无轨导航AGV的精确定位及停车方法,所述方法包括:AGV通过激光雷达扫描反射板,获取反射板上预设位置的坐标;从所述预设位置中选择用于定位的位置;根据所述选中的位置通过预设的规则计算出AGV当前的位置。本发明的方法是提取三个特殊反射点,实现三点定位,主要借助最小二乘法确定AGV在全局坐标系下的坐标方位,然后通过多象限计算AGV的方向角。也可以通过轮廓检测,计算出小车相对于反射板的相对位置和方向角,使得AGV可以精准停靠在反射板的指定位置,此种方法在很大程度上弥补了SLAM技术定位精度不
一种基于AGV小车的对接定位校准方法及AGV小车.pdf
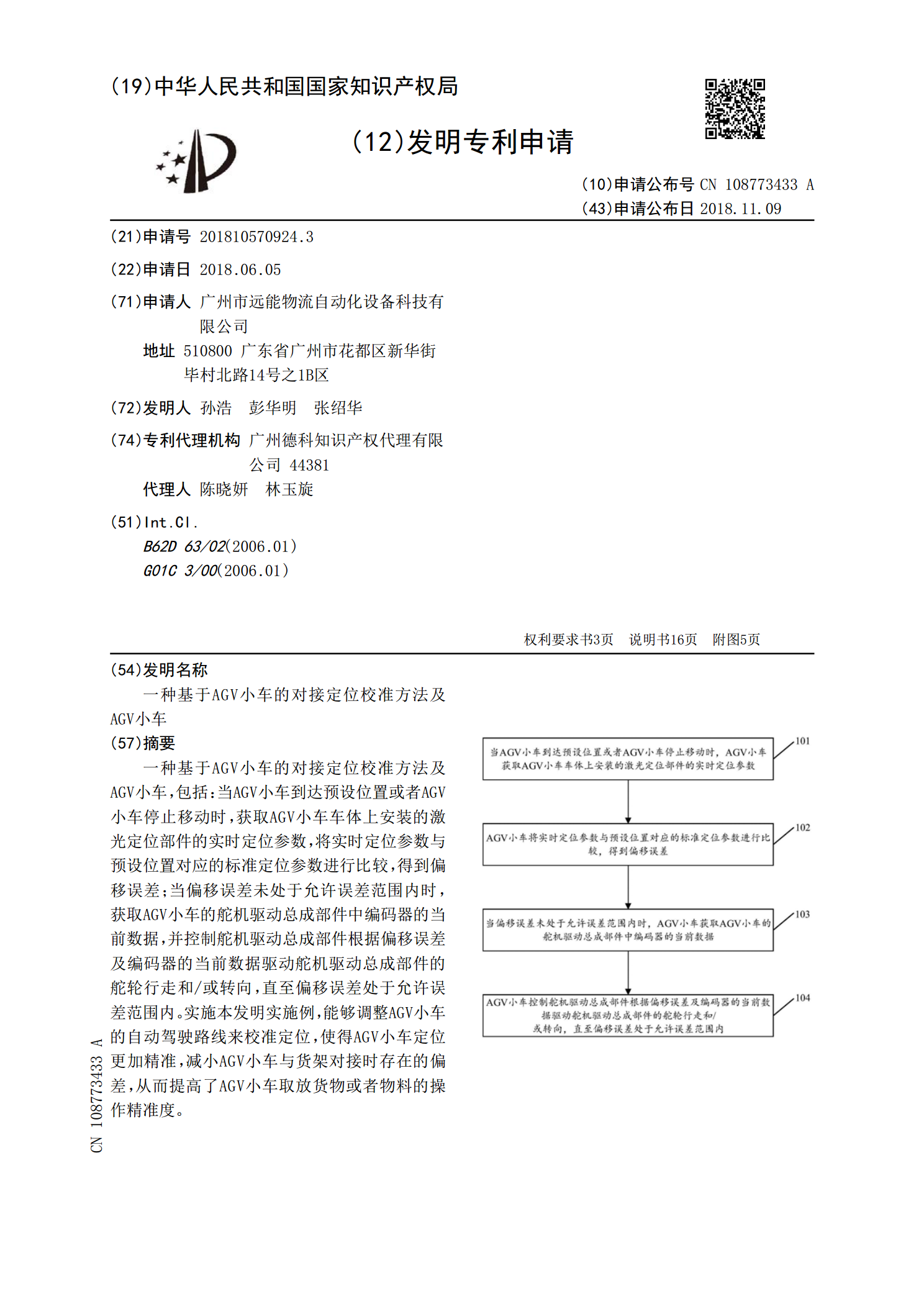
一种基于AGV小车的对接定位校准方法及AGV小车,包括:当AGV小车到达预设位置或者AGV小车停止移动时,获取AGV小车车体上安装的激光定位部件的实时定位参数,将实时定位参数与预设位置对应的标准定位参数进行比较,得到偏移误差;当偏移误差未处于允许误差范围内时,获取AGV小车的舵机驱动总成部件中编码器的当前数据,并控制舵机驱动总成部件根据偏移误差及编码器的当前数据驱动舵机驱动总成部件的舵轮行走和/或转向,直至偏移误差处于允许误差范围内。实施本发明实施例,能够调整AGV小车的自动驾驶路线来校准定位,使得AGV