
一种轮毂电机驱动汽车电动助力转向控制方法.pdf

萌运****魔王

1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种轮毂电机驱动汽车电动助力转向控制方法.pdf
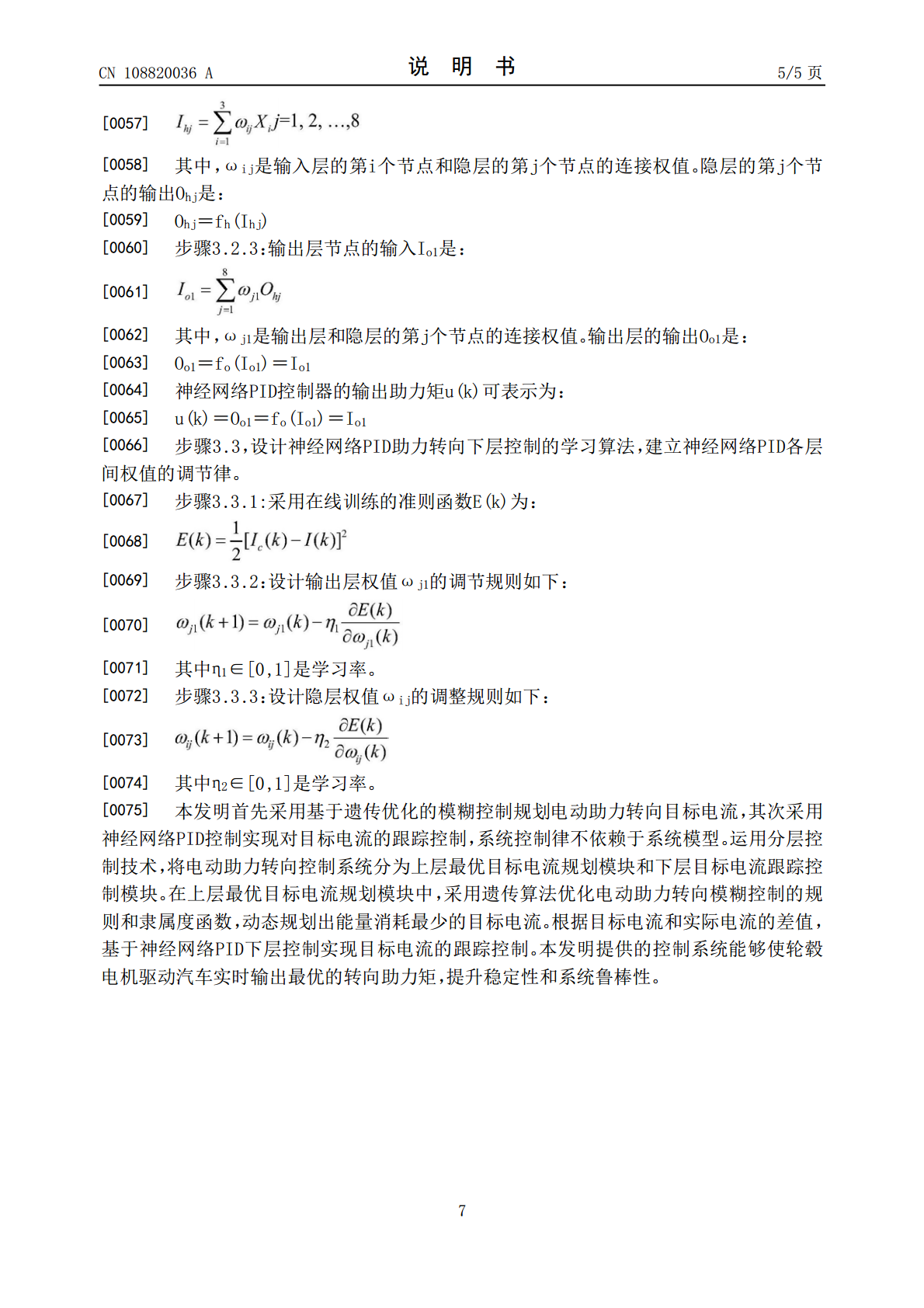
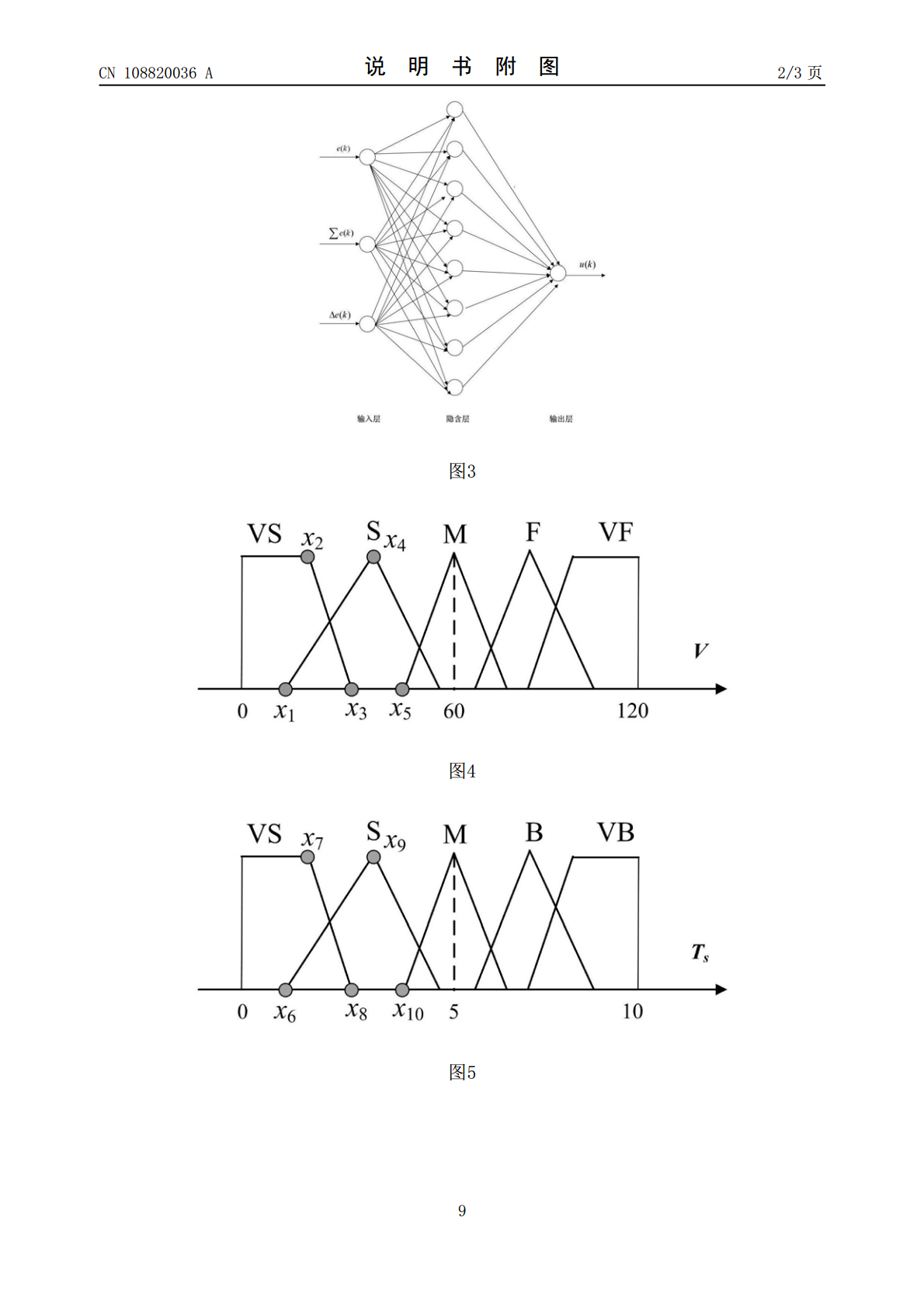
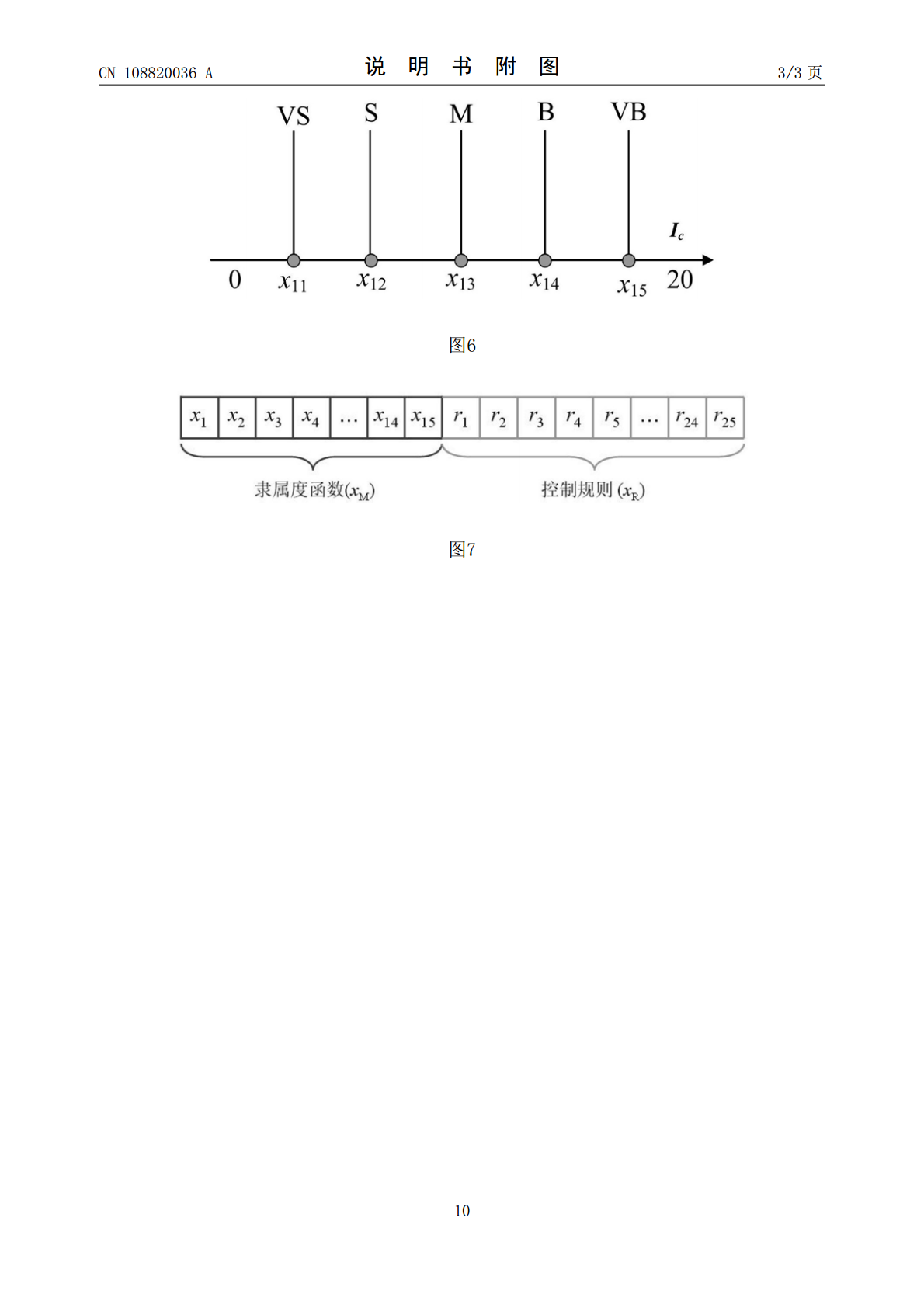
一种轮毂电机驱动汽车电动助力转向控制方法,涉及新能源汽车转向控制领域。设计车载信息的提取方法,建立轮毂电机驱动汽车电动助力转向动力学模型;以电动助力转向控制能量消耗最小为目标,采用基于遗传优化的自适应模糊控制技术设计轮毂电机驱动汽车电动助力转向最优目标电流规划模块。提出最优目标电流的神经网络PID下层控制方法,实现最优目标电流的跟踪控制。采用蚁群算法优化助力转向模糊控制规则和隶属度参数,可有效提升轮毂电机驱动汽车助力转向系统综合性能。克服轮毂电机驱动汽车强非线性特性、时变和不确定性等因素引起的干扰,明显改

一种轮毂电机驱动电动汽车差动助力转向稳定性控制方法.pdf
本发明公开了一种轮毂电机驱动电动汽车差动助力转向稳定性控制方法,包括以下步骤:S1、提取横摆角速度偏差和实际质心侧偏角组成特征状态;S2、基于可拓理论,计算出不同集合状态下的可拓协调控制的关联函数;S3、根据上述关联函数确定关联函数在不同集合状态下对应的差动助力矩权重系数以及横摆力矩权重系数;S4、建立差动助力转向控制器并结合差动助力矩权重系数得到差动助力矩;S5、建立横摆力矩控制器并结合横摆力矩权重系数得到横摆力矩;S6、根据实际车速信息并通过PID控制获取达到目标车速所需的总驱动转矩;S7、对差动助力
轮毂电机驱动电动汽车差动驱动转向及稳定性的控制方法.pdf
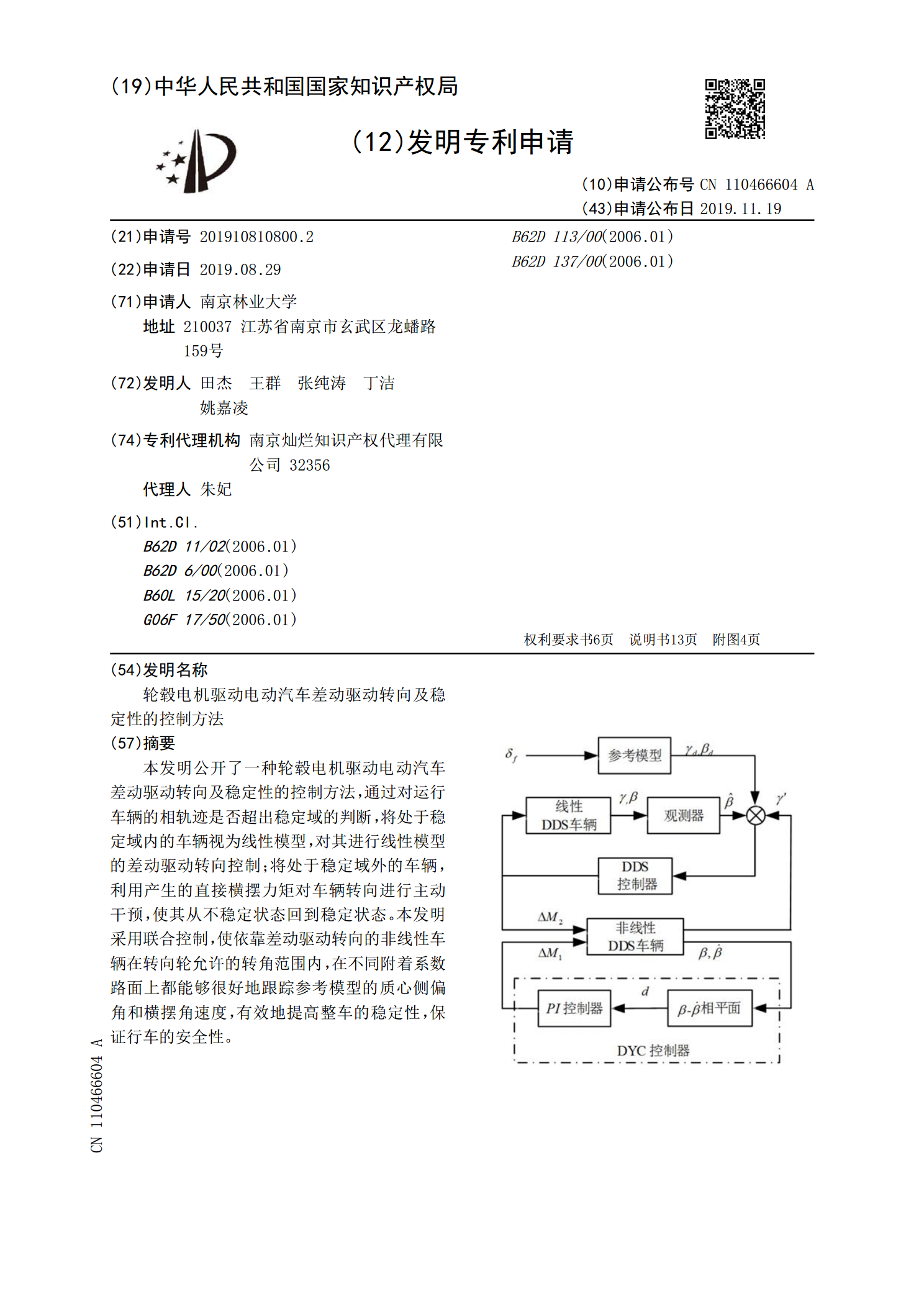
本发明公开了一种轮毂电机驱动电动汽车差动驱动转向及稳定性的控制方法,通过对运行车辆的相轨迹是否超出稳定域的判断,将处于稳定域内的车辆视为线性模型,对其进行线性模型的差动驱动转向控制;将处于稳定域外的车辆,利用产生的直接横摆力矩对车辆转向进行主动干预,使其从不稳定状态回到稳定状态。本发明采用联合控制,使依靠差动驱动转向的非线性车辆在转向轮允许的转角范围内,在不同附着系数路面上都能够很好地跟踪参考模型的质心侧偏角和横摆角速度,有效地提高整车的稳定性,保证行车的安全性。
一种轮毂电机驱动的电动轮汽车差动转向路感控制方法.pdf
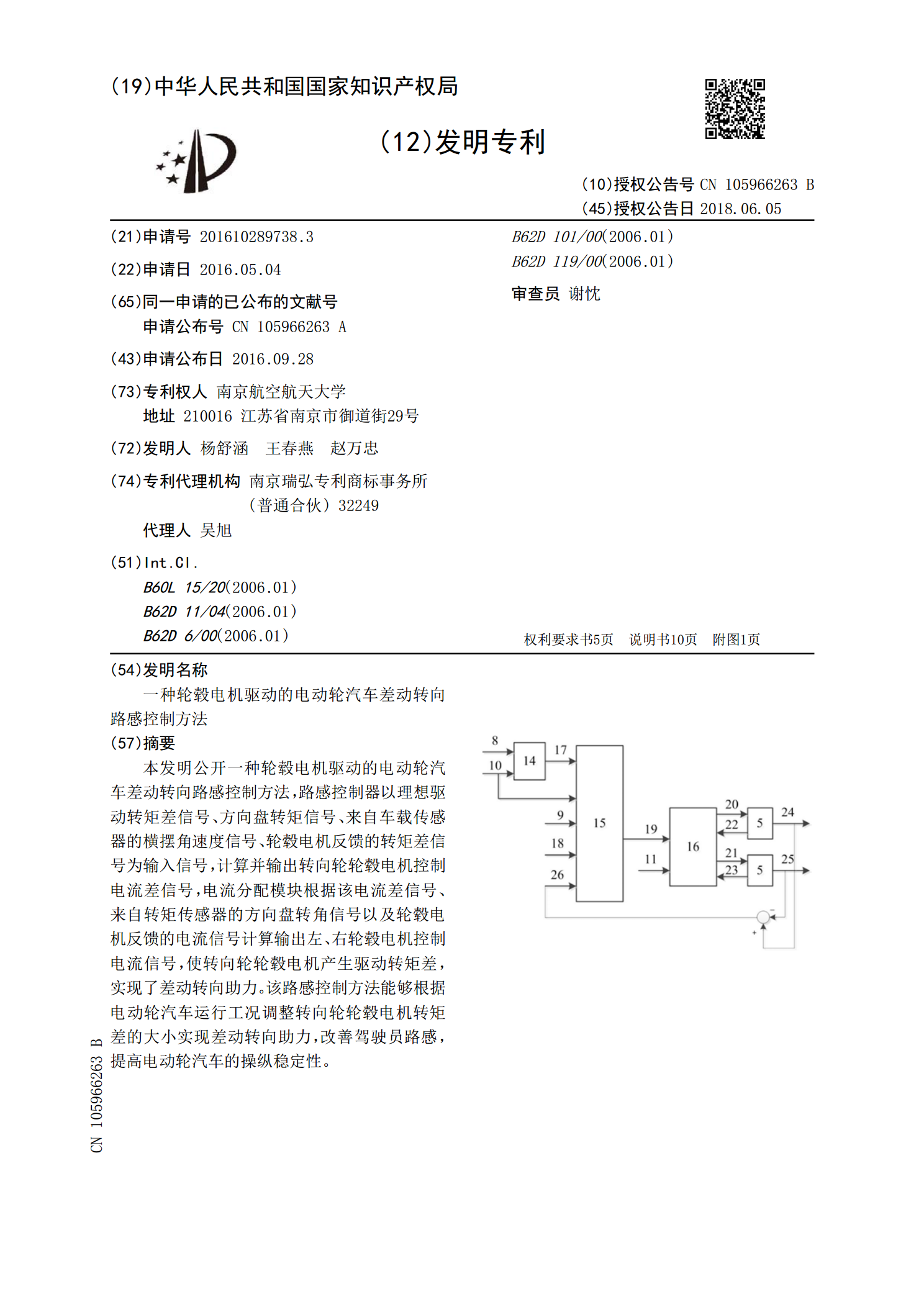
本发明公开一种轮毂电机驱动的电动轮汽车差动转向路感控制方法,路感控制器以理想驱动转矩差信号、方向盘转矩信号、来自车载传感器的横摆角速度信号、轮毂电机反馈的转矩差信号为输入信号,计算并输出转向轮轮毂电机控制电流差信号,电流分配模块根据该电流差信号、来自转矩传感器的方向盘转角信号以及轮毂电机反馈的电流信号计算输出左、右轮毂电机控制电流信号,使转向轮轮毂电机产生驱动转矩差,实现了差动转向助力。该路感控制方法能够根据电动轮汽车运行工况调整转向轮轮毂电机转矩差的大小实现差动转向助力,改善驾驶员路感,提高电动轮汽车的

轮毂电机驱动电动汽车转向性能控制研究.docx
轮毂电机驱动电动汽车转向性能控制研究轮毂电机驱动电动汽车转向性能控制研究摘要:电动汽车作为新能源汽车的一种重要形式,具有环保、高效、低噪音等优势日益受到关注。而其转向性能对于行车安全和舒适性具有重要影响。本论文主要研究轮毂电机驱动电动汽车的转向性能控制策略,包括转向系统的结构设计、转向控制方法以及参数优化等。关键词:轮毂电机,电动汽车,转向性能,控制策略一、引言随着环境污染和能源危机等问题的日益突出,电动汽车作为一种清洁、高效的交通工具逐渐受到广泛关注。而电动汽车的转向性能直接关系到行车的安全和舒适性,因