
一种仿真机器人的行走结构.pdf

猫巷****忠娟


1/6

2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种仿真机器人的行走结构.pdf
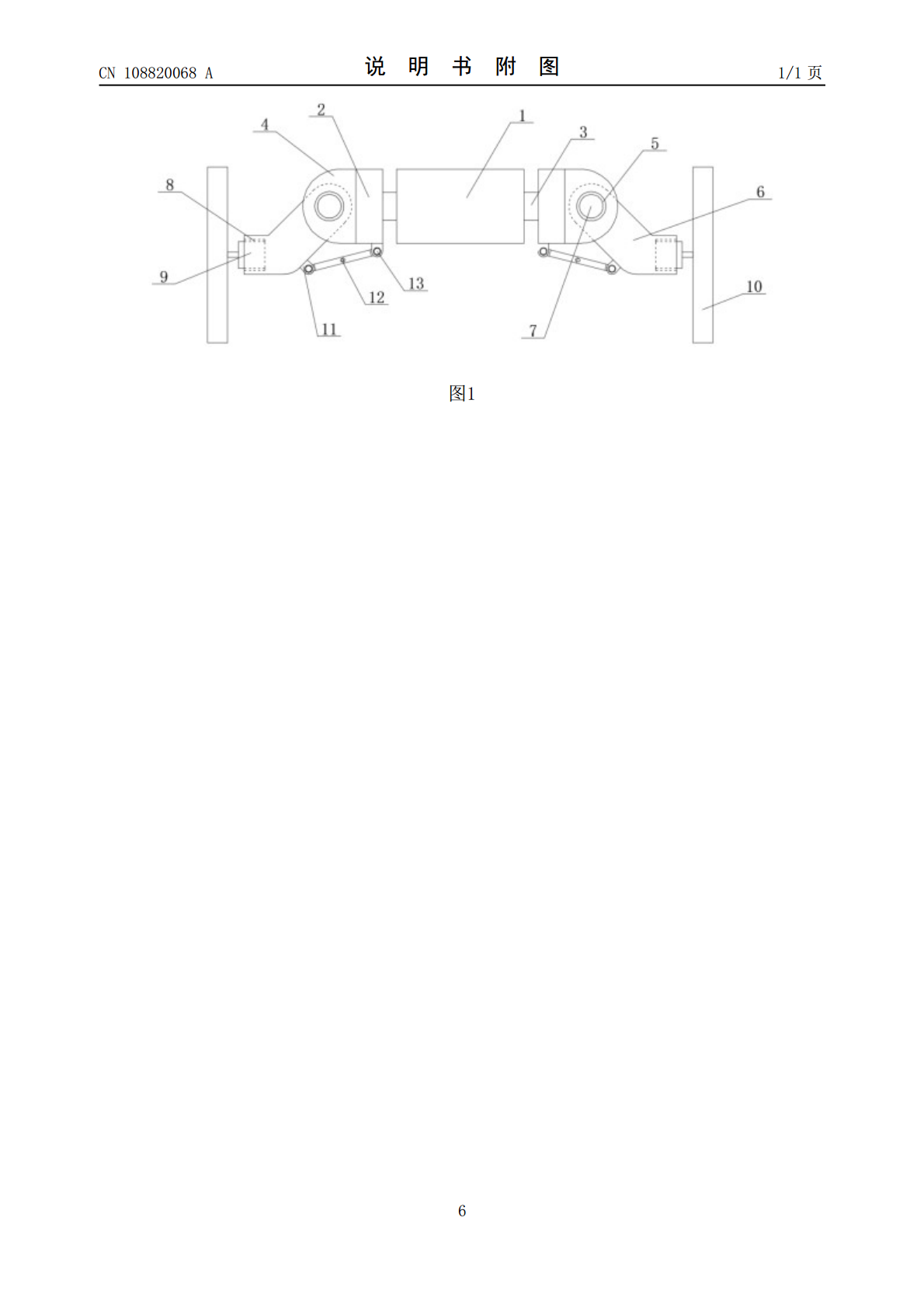
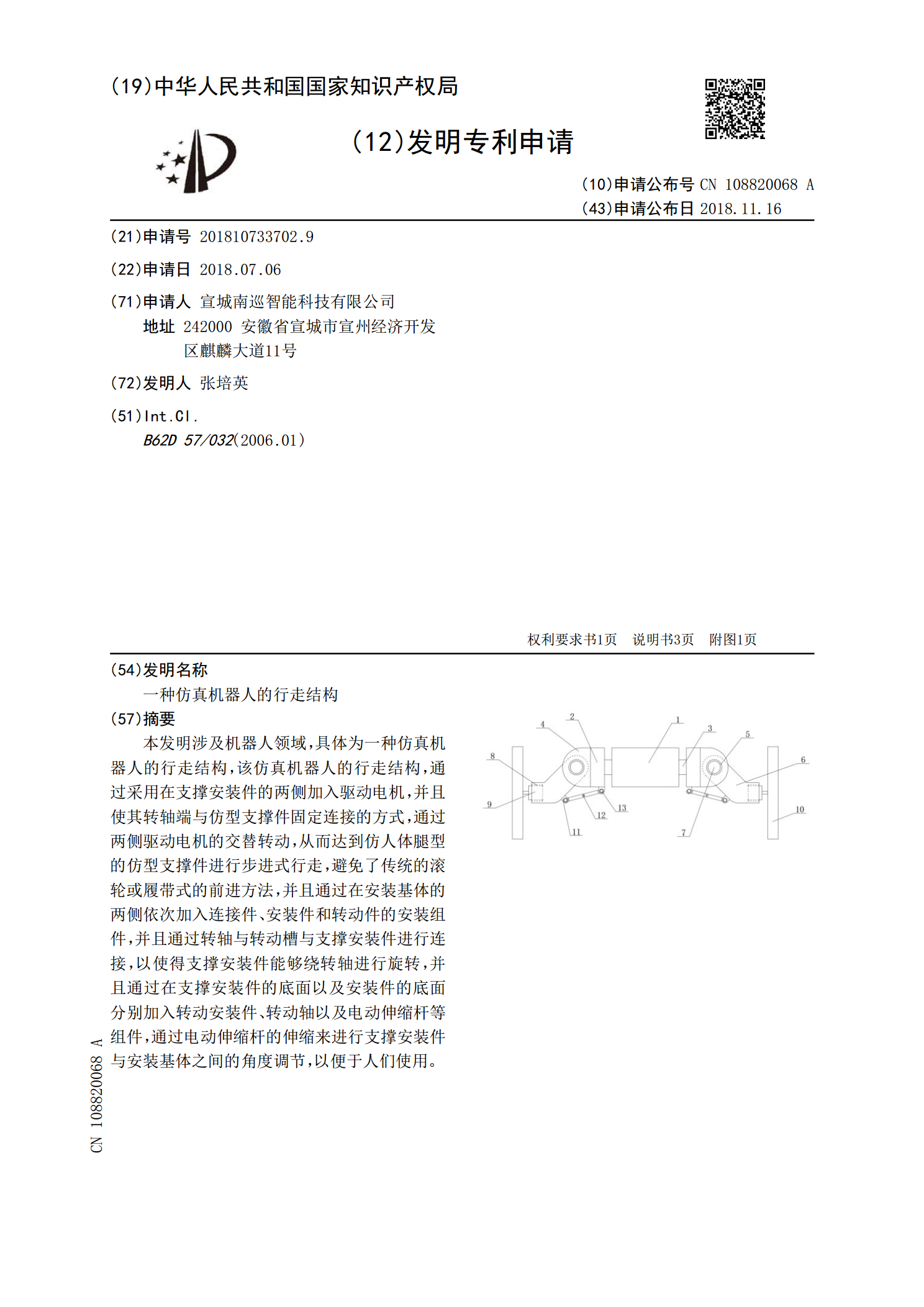
本发明涉及机器人领域,具体为一种仿真机器人的行走结构,该仿真机器人的行走结构,通过采用在支撑安装件的两侧加入驱动电机,并且使其转轴端与仿型支撑件固定连接的方式,通过两侧驱动电机的交替转动,从而达到仿人体腿型的仿型支撑件进行步进式行走,避免了传统的滚轮或履带式的前进方法,并且通过在安装基体的两侧依次加入连接件、安装件和转动件的安装组件,并且通过转轴与转动槽与支撑安装件进行连接,以使得支撑安装件能够绕转轴进行旋转,并且通过在支撑安装件的底面以及安装件的底面分别加入转动安装件、转动轴以及电动伸缩杆等组件,通过电
一种仿真机器人行走机构.pdf
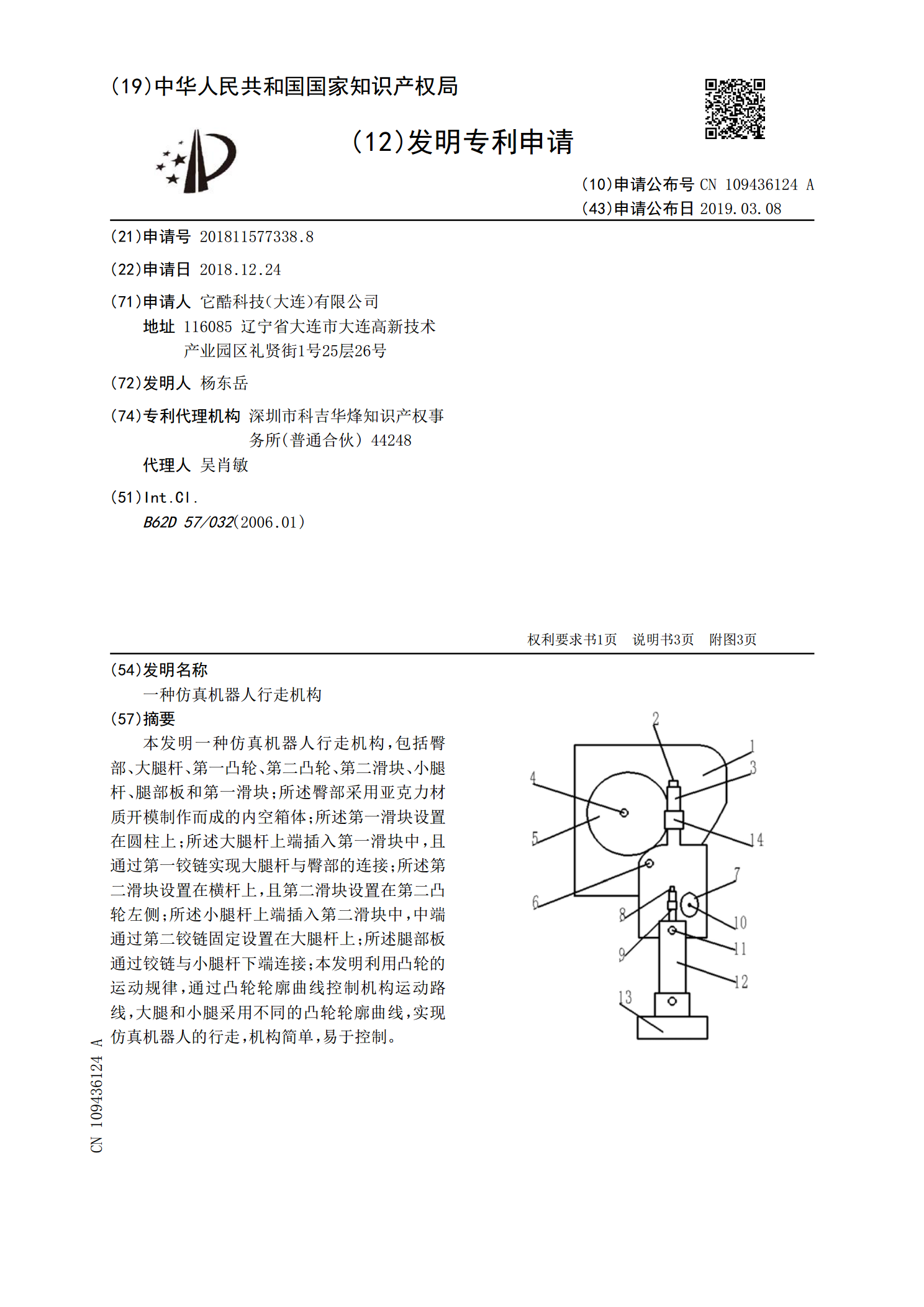
本发明一种仿真机器人行走机构,包括臀部、大腿杆、第一凸轮、第二凸轮、第二滑块、小腿杆、腿部板和第一滑块;所述臀部采用亚克力材质开模制作而成的内空箱体;所述第一滑块设置在圆柱上;所述大腿杆上端插入第一滑块中,且通过第一铰链实现大腿杆与臀部的连接;所述第二滑块设置在横杆上,且第二滑块设置在第二凸轮左侧;所述小腿杆上端插入第二滑块中,中端通过第二铰链固定设置在大腿杆上;所述腿部板通过铰链与小腿杆下端连接;本发明利用凸轮的运动规律,通过凸轮轮廓曲线控制机构运动路线,大腿和小腿采用不同的凸轮轮廓曲线,实现仿真机器人

机器人行走结构.pdf
机器人行走结构的类型及特点机器人行走结构的类型及特点一、移动机器人行走机构概述机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。固定式轨迹主要用于工业机器人,它是对人类手臂动作和功能的模拟和扩展;无固定轨迹就是指具有移动功能的移动机器人,它是对人类行走功能的模拟和扩展。移动机器人的行走结构形式主要有:车轮式移动结构;履带式移动结构;步行式移动结构。此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,适合于各种特别的场合。从移动机器人所处环境看,可以分为结构环境和非结构

机器人行走结构.pdf
机器人行走结构--机器人行走结构的类型及特点机器人行走结构的类型及特点一、移动机器人行走机构概述机器人行走机构按照其运动轨迹可分为固定式轨迹和无固定式轨迹两种。固定式轨迹主要用于工业机器人,它是对人类手臂动作和功能的模拟和扩展;无固定轨迹就是指具有移动功能的移动机器人,它是对人类行走功能的模拟和扩展。移动机器人的行走结构形式主要有:车轮式移动结构;履带式移动结构;步行式移动结构。此外,还有步进式移动结构、蠕动式移动结构、混合式移动结构和蛇行式移动结构等,适合于各种特别的场合。从移动机器人所处环境看,可以分

机器人行走仿真与控制研究.docx
机器人行走仿真与控制研究中文摘要:本文通过对机器人行走仿真与控制的研究,探究了机器人行走仿真的基本原理,分析了机器人行走控制中的基础问题与方法,研究了基于PID控制算法的机器人行走稳定性优化等相关内容。实验结果表明,本文所研究的机器人行走仿真与控制方法,能够有效提升机器人行走的稳定性和效率,为机器人行走控制研究提供了一定的参考价值。关键词:机器人;行走仿真;控制研究;PID算法;稳定性优化Abstract:Thispaperexploresthebasicprinciplesofrobotwalkings