
机器人行走仿真与控制研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人行走仿真与控制研究.docx
机器人行走仿真与控制研究中文摘要:本文通过对机器人行走仿真与控制的研究,探究了机器人行走仿真的基本原理,分析了机器人行走控制中的基础问题与方法,研究了基于PID控制算法的机器人行走稳定性优化等相关内容。实验结果表明,本文所研究的机器人行走仿真与控制方法,能够有效提升机器人行走的稳定性和效率,为机器人行走控制研究提供了一定的参考价值。关键词:机器人;行走仿真;控制研究;PID算法;稳定性优化Abstract:Thispaperexploresthebasicprinciplesofrobotwalkings

温室作业机器人视觉路径检测及行走控制仿真.docx
温室作业机器人视觉路径检测及行走控制仿真摘要本文针对温室作业机器人行走时遇到的路径检测问题和行走控制问题进行了研究。主要利用机器视觉技术和仿真模拟方法,设计了一套有效的路径检测和行走控制系统。首先,通过对温室中不同区域的拍摄图像进行处理和分析,提取出地面上的实际路径;然后,利用路径信息来控制机器人行走的方向。在仿真实验中,我们利用MATLAB环境来构建机器人行走路径模型进行验证和优化。结果表明,本文提出的方法能够实现对温室作业机器人的自主行走,有效地提高了温室作业的精准度和效率。关键词:温室作业机器人;机

电缆隧道巡检机器人行走机构的仿真研究.docx
电缆隧道巡检机器人行走机构的仿真研究电缆隧道巡检机器人行走机构的仿真研究摘要:电缆隧道是现代城市电力系统不可或缺的一部分,为了提高电缆隧道的巡检效率和减少人工巡检的风险,设计一种行走机构的巡检机器人具有重要的实用价值。本文以电缆隧道巡检机器人的行走机构仿真研究为课题,通过建立机器人行走模型和分析仿真结果,对机器人行走机构进行了优化和改进,提高了机器人的行走稳定性和适应能力。关键词:电缆隧道;巡检机器人;行走机构;仿真研究1.引言电缆隧道是电力系统中负责电力输送和传输的重要通道,其长度较长、形状复杂、工作环

仿真行走钢丝机器人.pdf
本发明公开了一种仿真行走钢丝机器人,包括行走装置、平衡装置和检测控制装置,行走装置包带V型槽的前、后行走轮以及行走轮驱动机构,平衡装置包括平衡杆转动机构、平衡杆平动机构和平衡杆铅垂运动机构,平衡杆铅垂运动机构设于行走装置上,平衡杆平动机构设于平衡杆铅垂运动机构上,平衡杆转动机构设于平衡杆平动机构上;检测控制装置包括陀螺仪和运动控制器、伺服驱动器、无线模块以及电池组,运动控制器根据陀螺仪的信号向伺服驱动器发出指令控制行走轮行走,并于行走过程中控制转动、平动和铅垂运动的综合运动进行平衡。本发明可模拟人类走钢丝
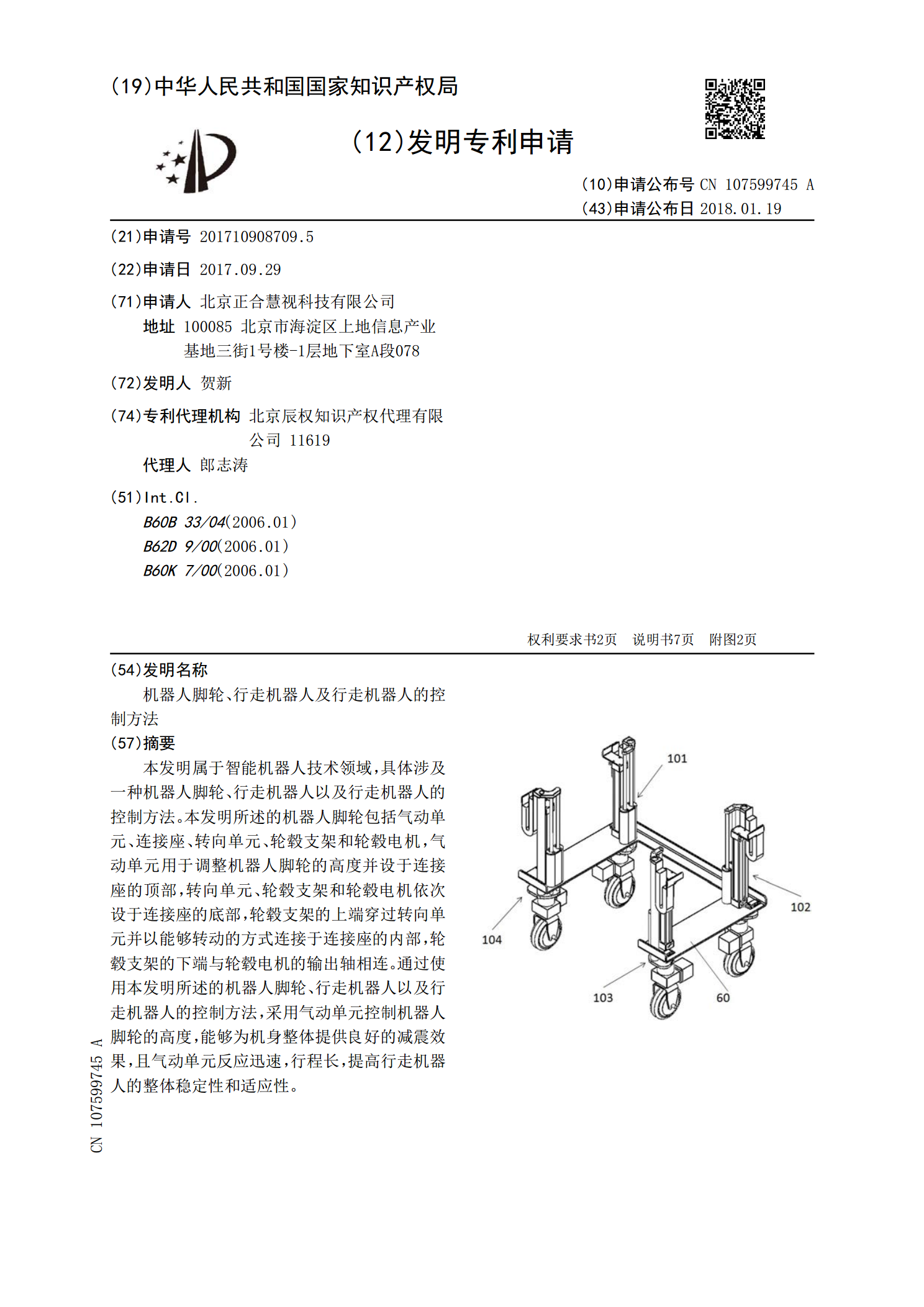
机器人脚轮、行走机器人及行走机器人的控制方法.pdf
本发明属于智能机器人技术领域,具体涉及一种机器人脚轮、行走机器人以及行走机器人的控制方法。本发明所述的机器人脚轮包括气动单元、连接座、转向单元、轮毂支架和轮毂电机,气动单元用于调整机器人脚轮的高度并设于连接座的顶部,转向单元、轮毂支架和轮毂电机依次设于连接座的底部,轮毂支架的上端穿过转向单元并以能够转动的方式连接于连接座的内部,轮毂支架的下端与轮毂电机的输出轴相连。通过使用本发明所述的机器人脚轮、行走机器人以及行走机器人的控制方法,采用气动单元控制机器人脚轮的高度,能够为机身整体提供良好的减震效果,且气动