
一种用于轮足机器人的并联式柔顺轮足装置.pdf

婀娜****aj

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于轮足机器人的并联式柔顺轮足装置.pdf
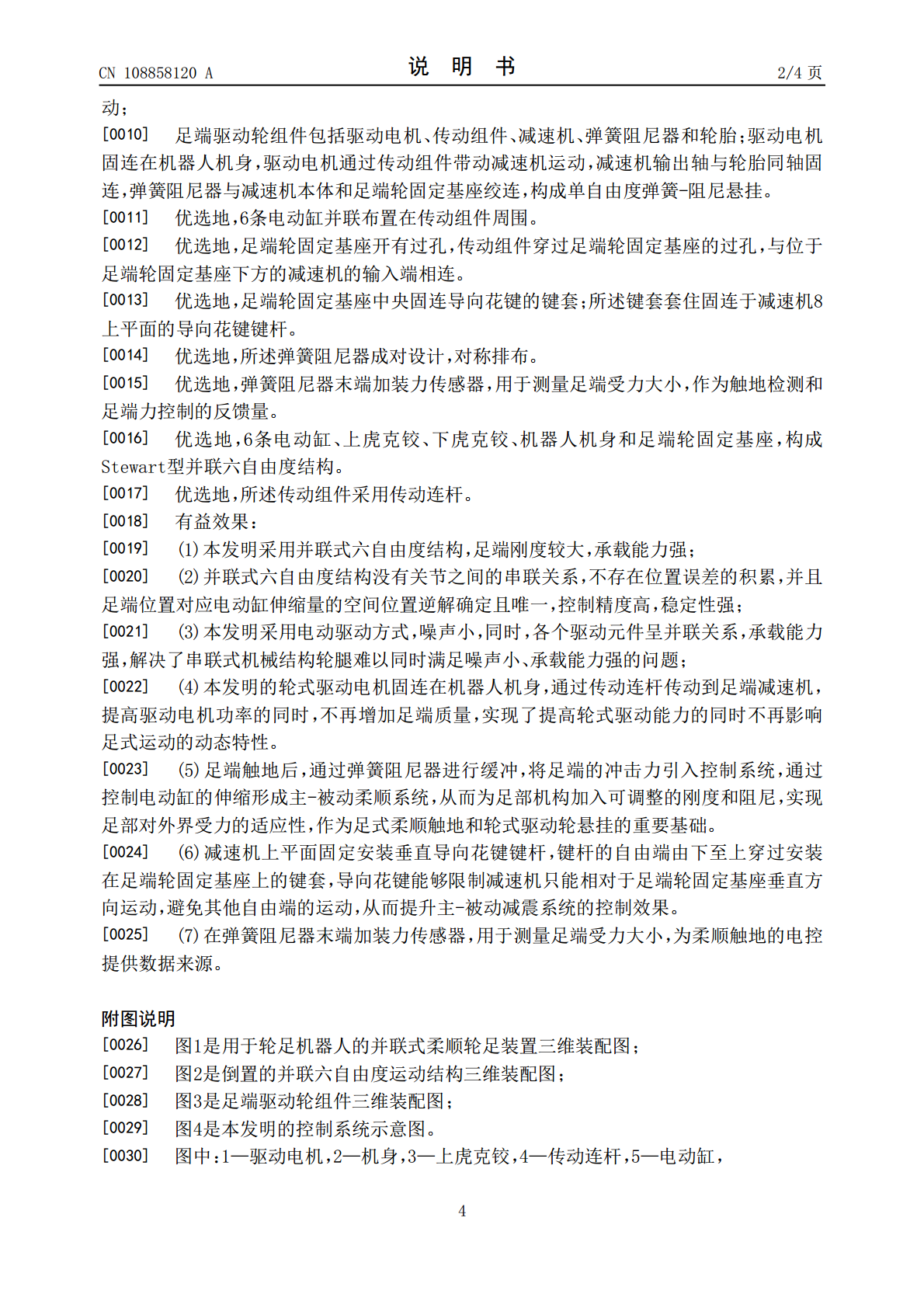
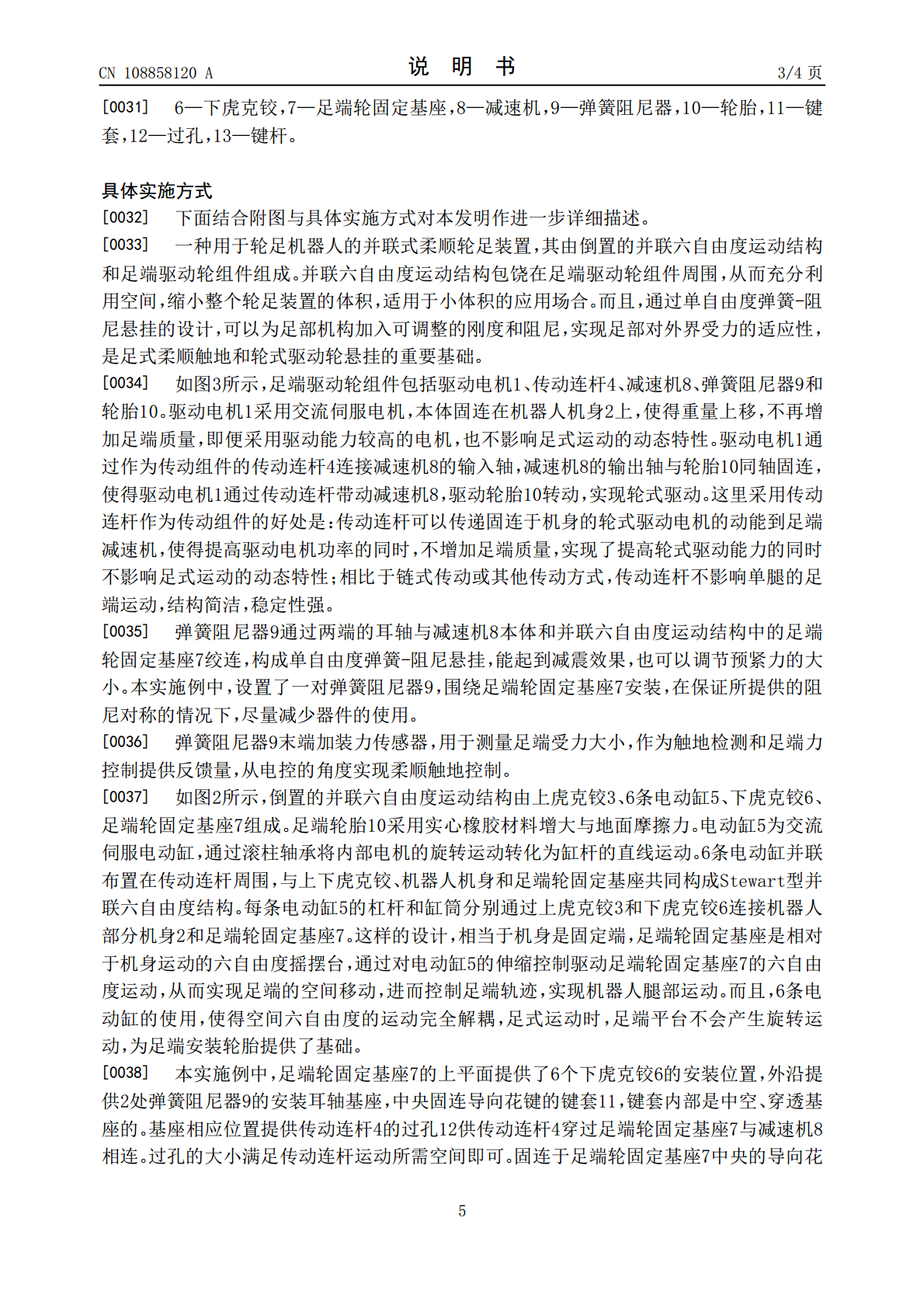
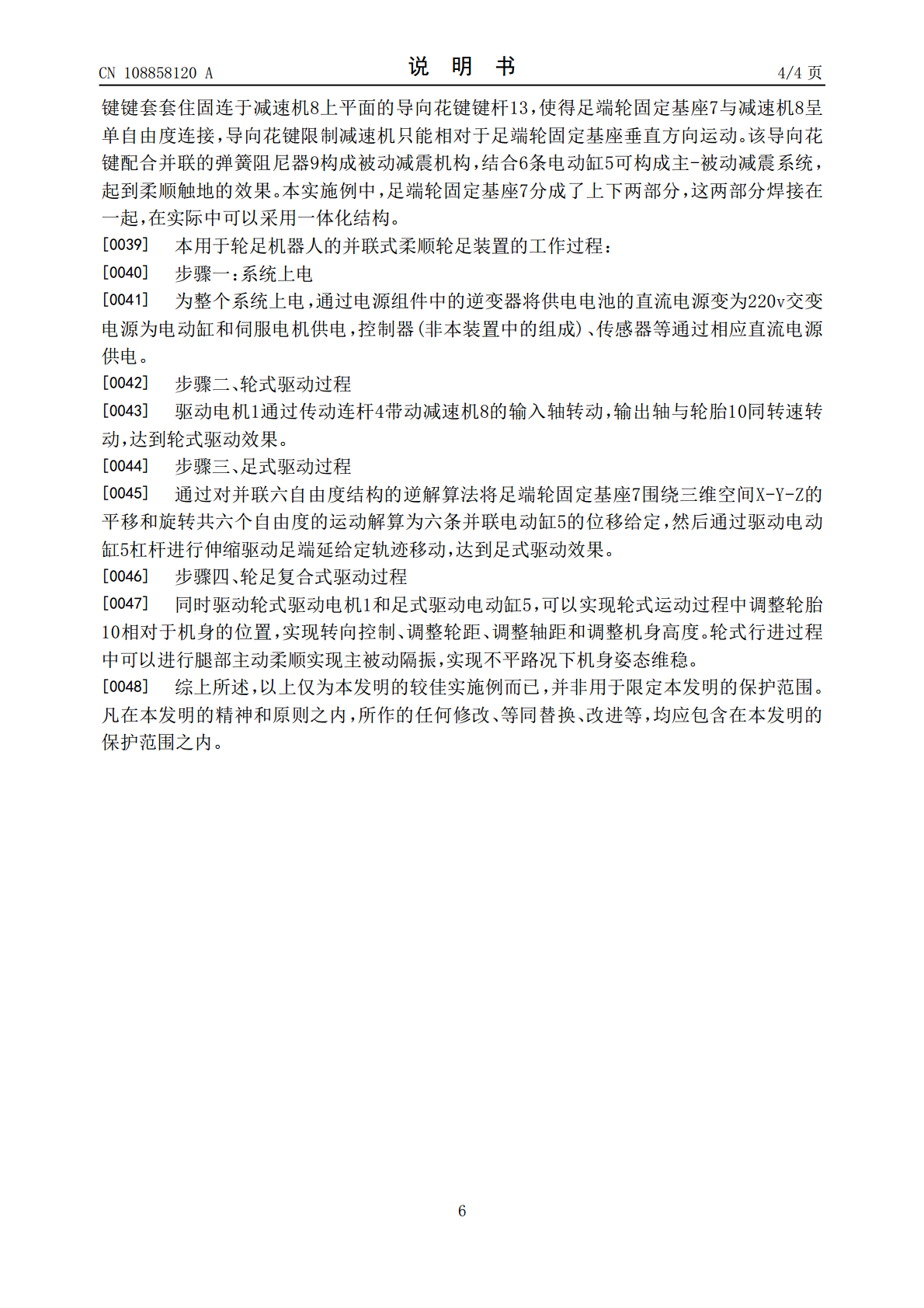
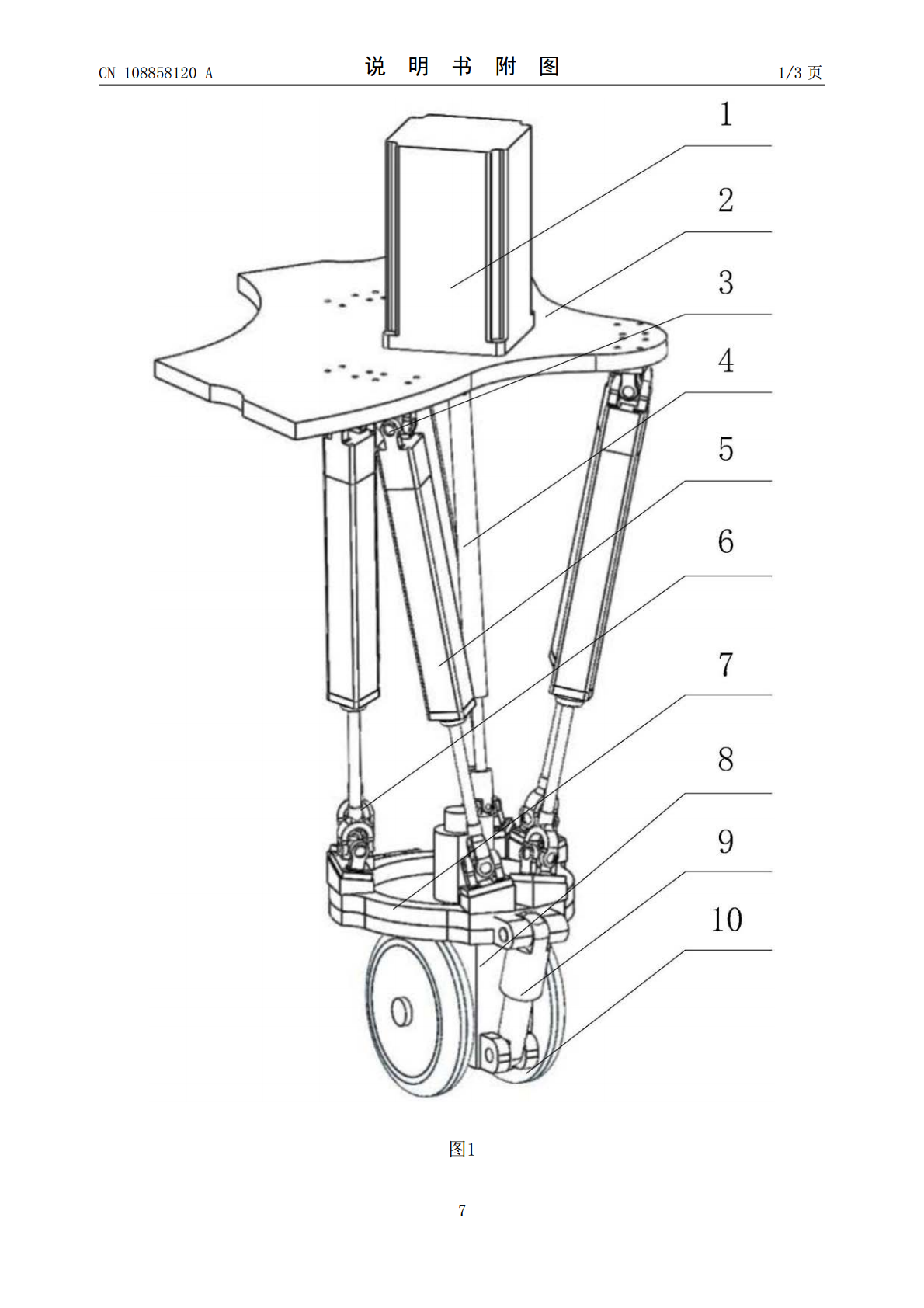
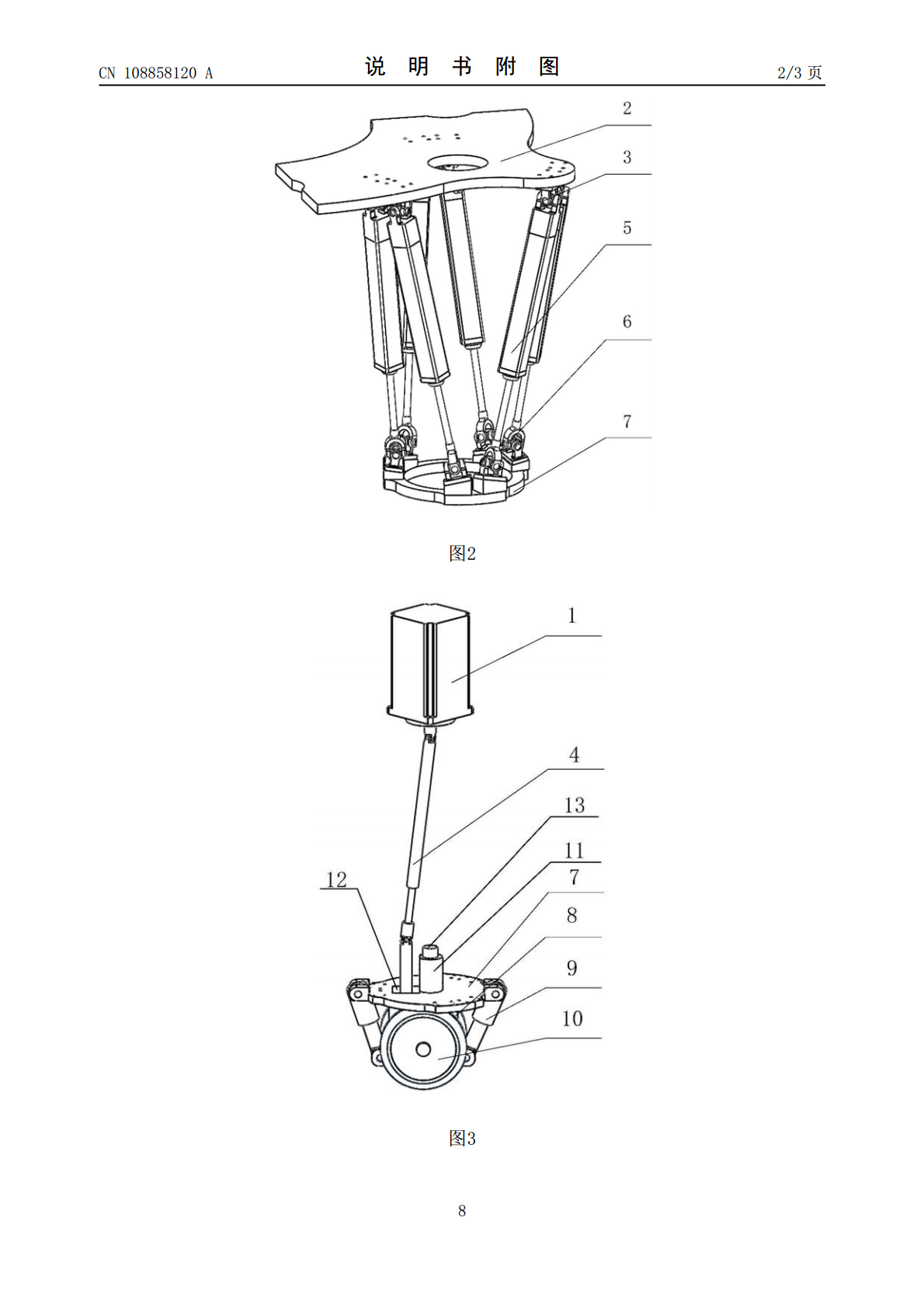
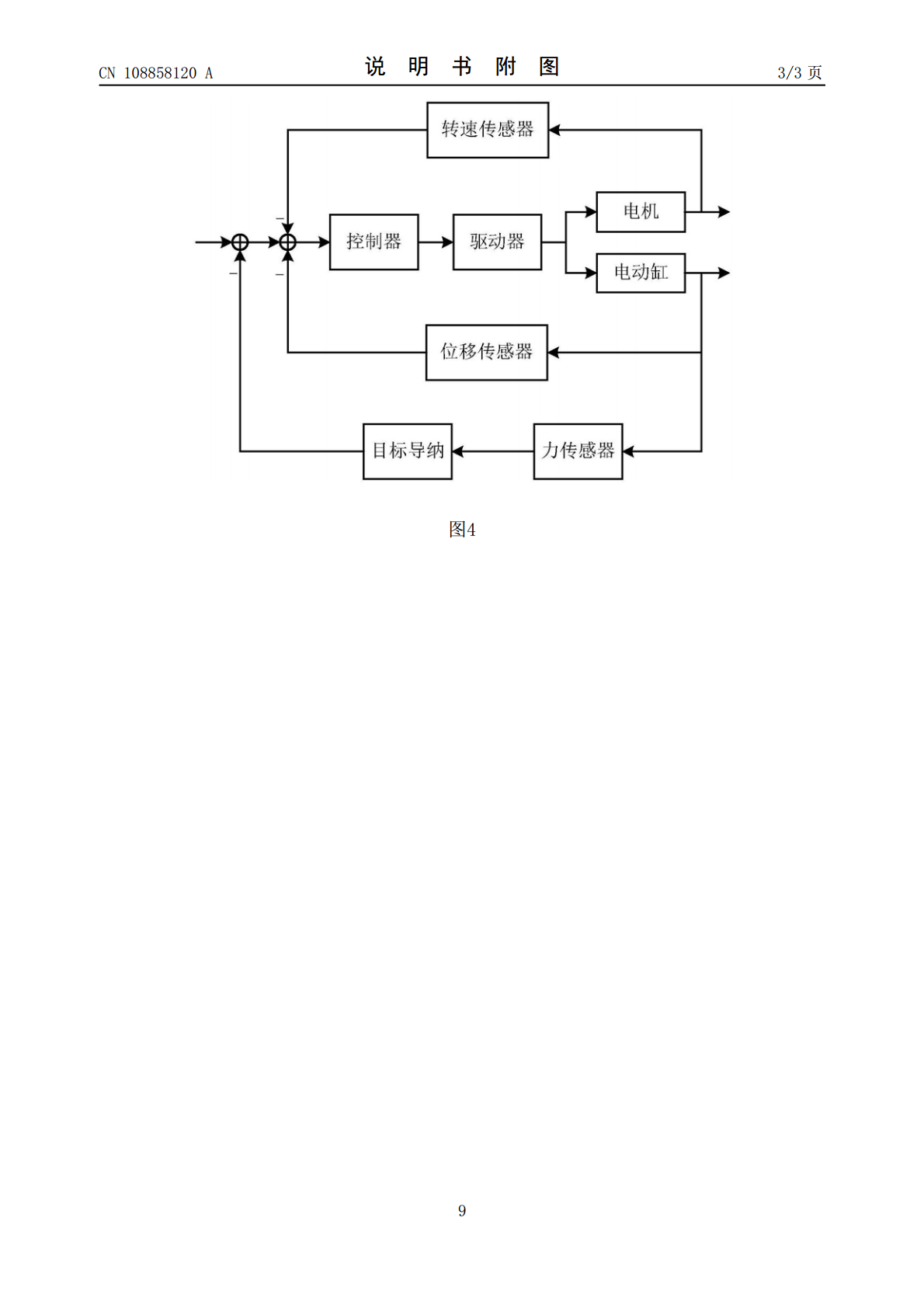
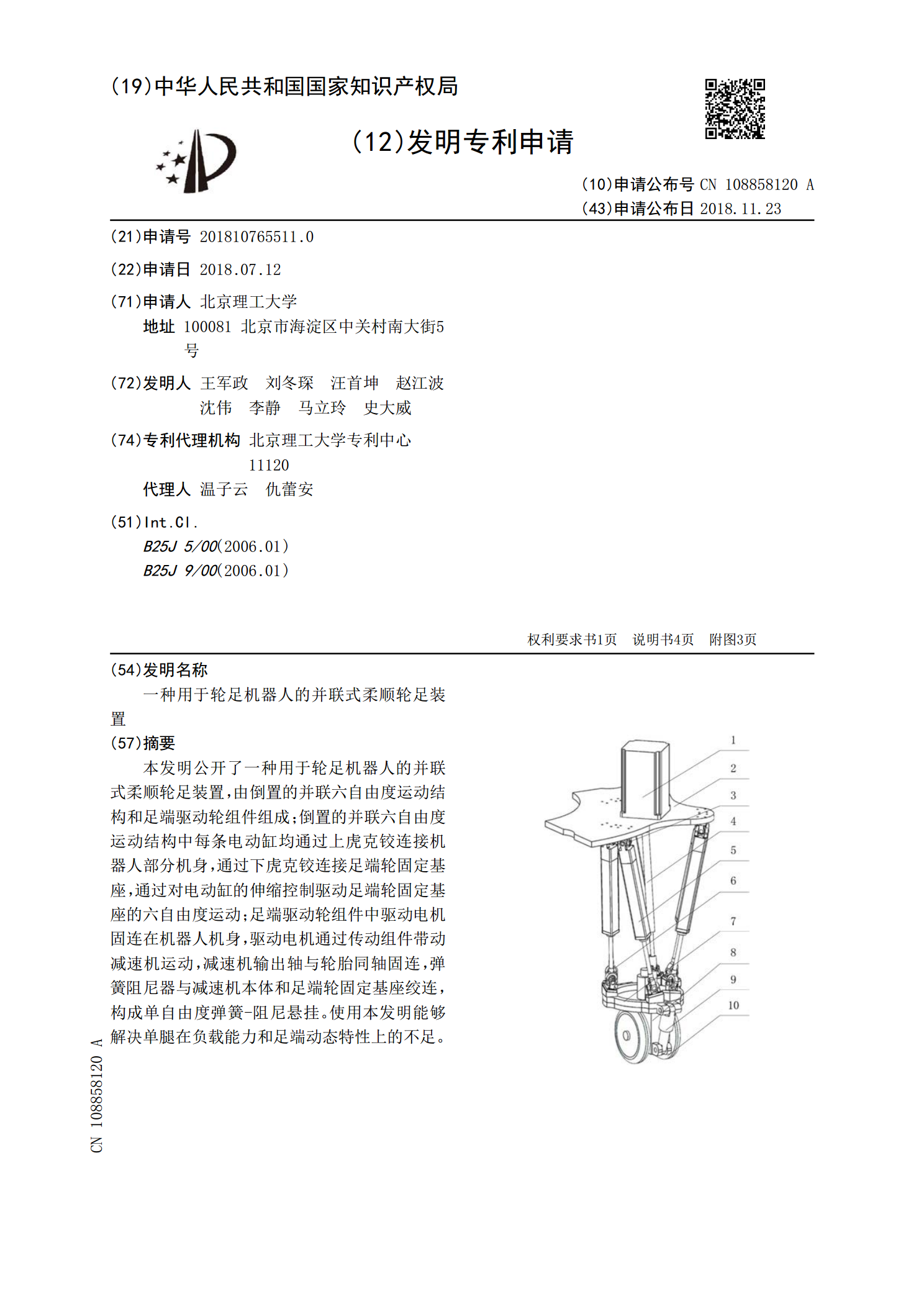
本发明公开了一种用于轮足机器人的并联式柔顺轮足装置,由倒置的并联六自由度运动结构和足端驱动轮组件组成;倒置的并联六自由度运动结构中每条电动缸均通过上虎克铰连接机器人部分机身,通过下虎克铰连接足端轮固定基座,通过对电动缸的伸缩控制驱动足端轮固定基座的六自由度运动;足端驱动轮组件中驱动电机固连在机器人机身,驱动电机通过传动组件带动减速机运动,减速机输出轴与轮胎同轴固连,弹簧阻尼器与减速机本体和足端轮固定基座绞连,构成单自由度弹簧‑阻尼悬挂。使用本发明能够解决单腿在负载能力和足端动态特性上的不足。
轮足式结构及轮足式机器人.pdf
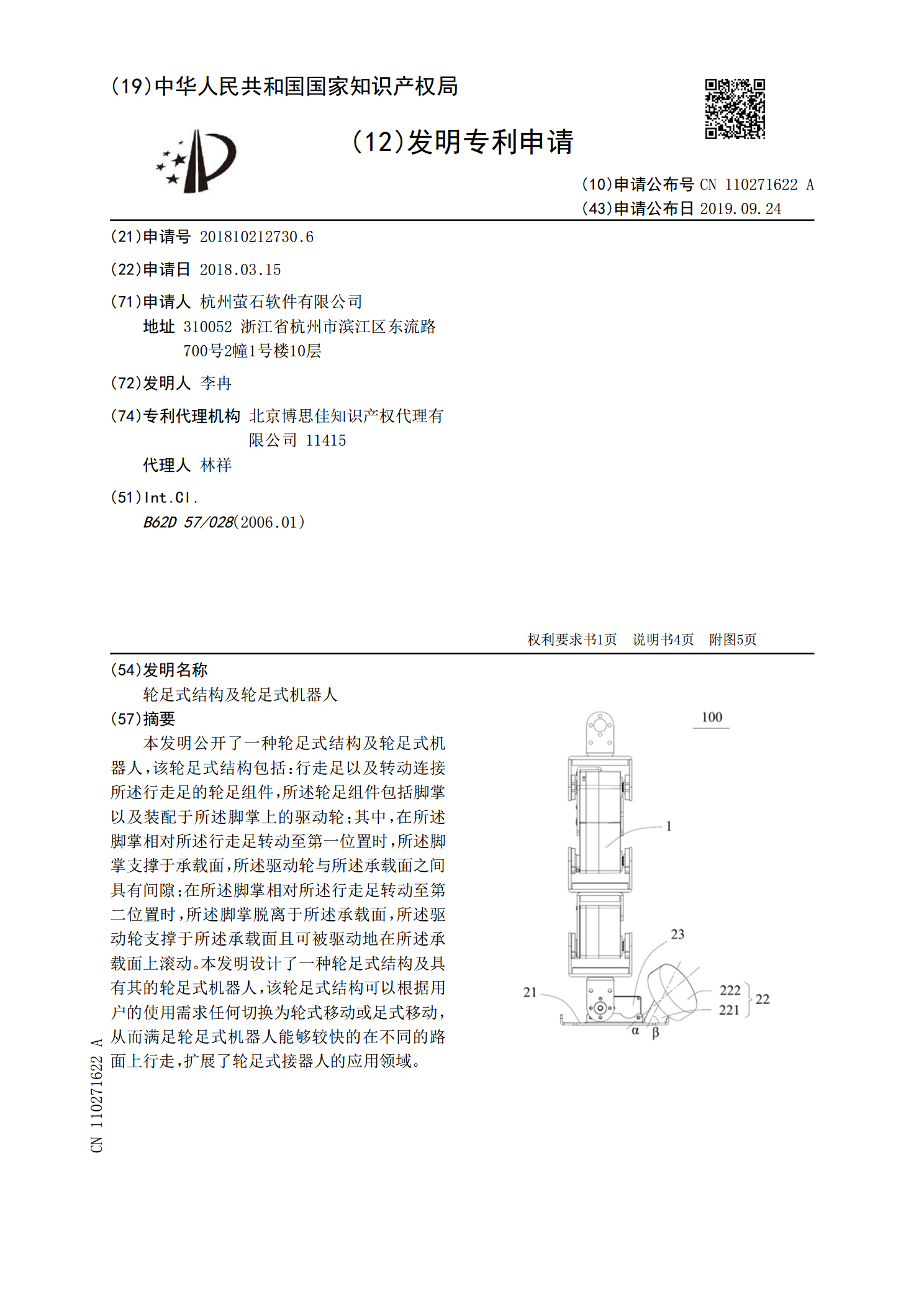
本发明公开了一种轮足式结构及轮足式机器人,该轮足式结构包括:行走足以及转动连接所述行走足的轮足组件,所述轮足组件包括脚掌以及装配于所述脚掌上的驱动轮;其中,在所述脚掌相对所述行走足转动至第一位置时,所述脚掌支撑于承载面,所述驱动轮与所述承载面之间具有间隙;在所述脚掌相对所述行走足转动至第二位置时,所述脚掌脱离于所述承载面,所述驱动轮支撑于所述承载面且可被驱动地在所述承载面上滚动。本发明设计了一种轮足式结构及具有其的轮足式机器人,该轮足式结构可以根据用户的使用需求任何切换为轮式移动或足式移动,从而满足轮足式
全向轮足式机器人.pdf
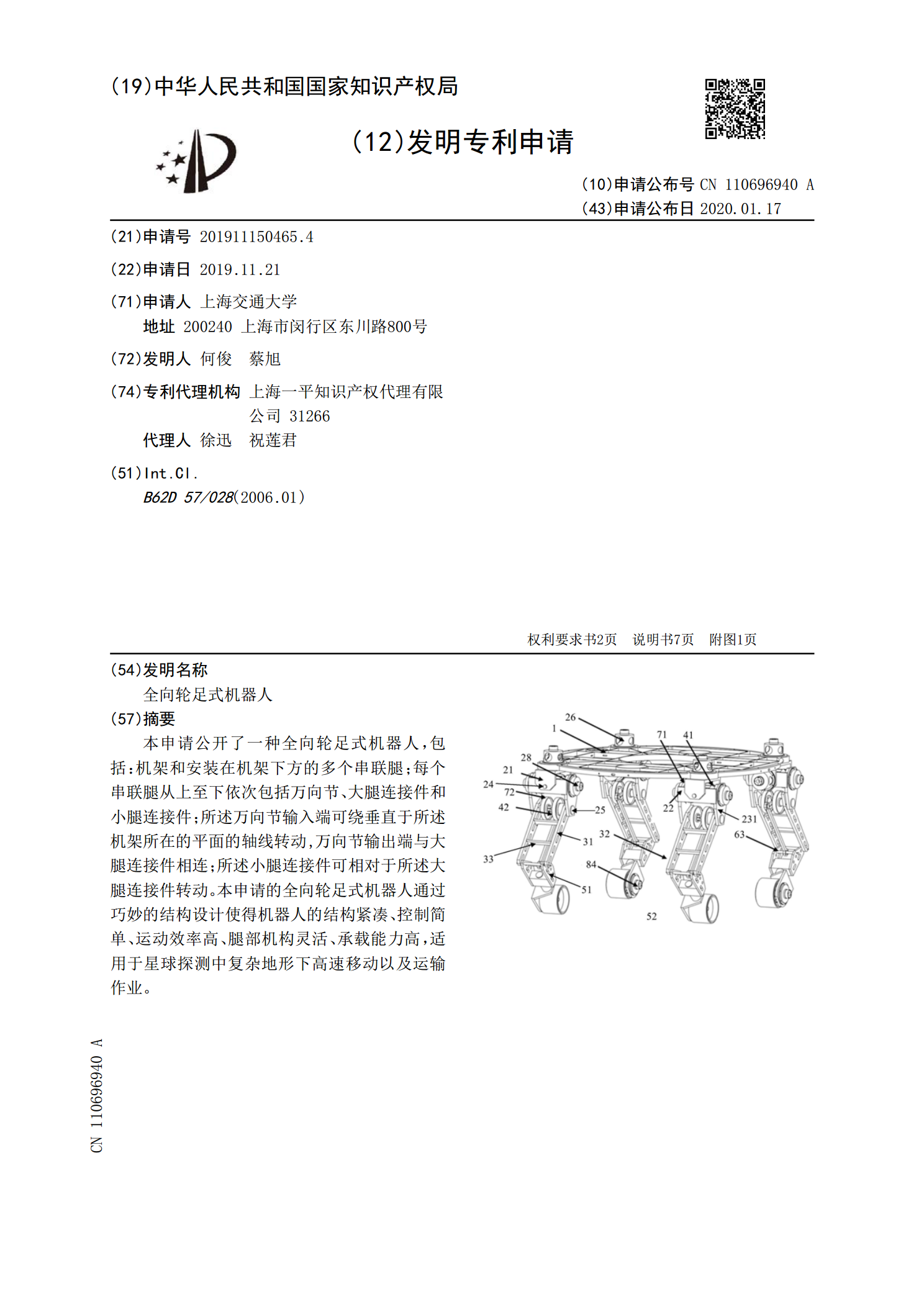
本申请公开了一种全向轮足式机器人,包括:机架和安装在机架下方的多个串联腿;每个串联腿从上至下依次包括万向节、大腿连接件和小腿连接件;所述万向节输入端可绕垂直于所述机架所在的平面的轴线转动,万向节输出端与大腿连接件相连;所述小腿连接件可相对于所述大腿连接件转动。本申请的全向轮足式机器人通过巧妙的结构设计使得机器人的结构紧凑、控制简单、运动效率高、腿部机构灵活、承载能力高,适用于星球探测中复杂地形下高速移动以及运输作业。
六轮足式机器人.pdf
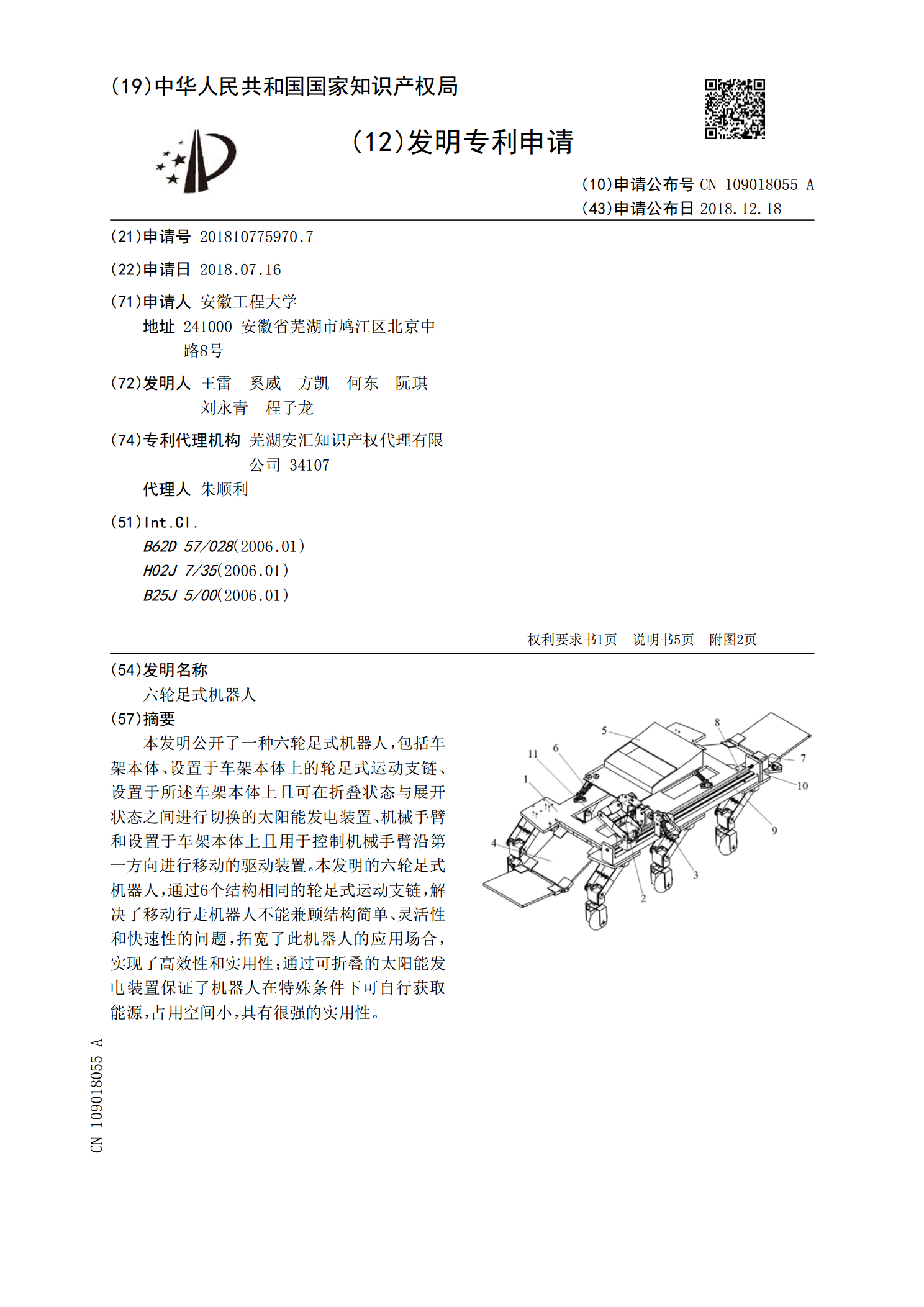
本发明公开了一种六轮足式机器人,包括车架本体、设置于车架本体上的轮足式运动支链、设置于所述车架本体上且可在折叠状态与展开状态之间进行切换的太阳能发电装置、机械手臂和设置于车架本体上且用于控制机械手臂沿第一方向进行移动的驱动装置。本发明的六轮足式机器人,通过6个结构相同的轮足式运动支链,解决了移动行走机器人不能兼顾结构简单、灵活性和快速性的问题,拓宽了此机器人的应用场合,实现了高效性和实用性;通过可折叠的太阳能发电装置保证了机器人在特殊条件下可自行获取能源,占用空间小,具有很强的实用性。

机器人的轮足式变形腿足机构.pdf
本发明公开了一种机器人的轮足式变形腿足机构,本体支撑件中包括一个本体支撑件伺服电机,其传动连接连接部一端以带动本体抬升或下降;连接部另一端连接固定于主腿,经连接部的牵引使得主腿和本体连动;主腿包括一个主腿伺服电机,其带动主腿相对于连接部运转;小腿包括一个小腿伺服电机,小腿一端经转轴铰链连接于主腿底部,小腿绕转轴相对于主腿成0°~90°夹角转动,小腿伺服电机传动连接轮足以实现轮式运动;还包括一个柔性牵拉部件,连接固定于小腿与主腿之间。本发明的腿部结构在足式行走中将小腿伺服电机收缩于主腿内,结构变形即可成轮式