
螺旋锥齿轮的含误差齿面接触分析方法.pdf

慧娇****文章

1/10
2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

螺旋锥齿轮的含误差齿面接触分析方法.pdf
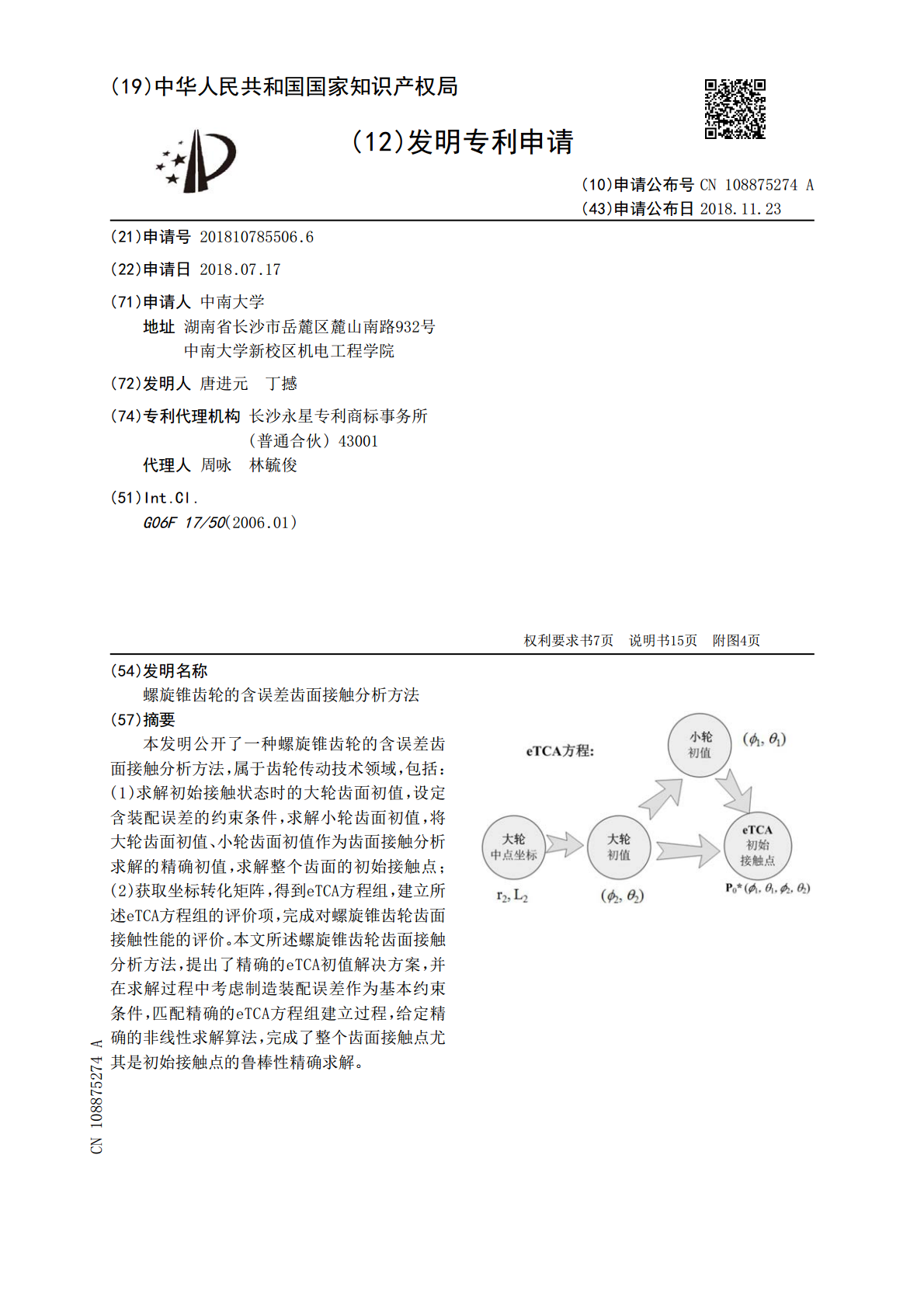
本发明公开了一种螺旋锥齿轮的含误差齿面接触分析方法,属于齿轮传动技术领域,包括:(1)求解初始接触状态时的大轮齿面初值,设定含装配误差的约束条件,求解小轮齿面初值,将大轮齿面初值、小轮齿面初值作为齿面接触分析求解的精确初值,求解整个齿面的初始接触点;(2)获取坐标转化矩阵,得到eTCA方程组,建立所述eTCA方程组的评价项,完成对螺旋锥齿轮齿面接触性能的评价。本文所述螺旋锥齿轮齿面接触分析方法,提出了精确的eTCA初值解决方案,并在求解过程中考虑制造装配误差作为基本约束条件,匹配精确的eTCA方程组建立过

一种针对摆线齿锥齿轮误差加载齿面接触分析的方法.pdf
本发明涉及一种针对摆线齿锥齿轮误差加载齿面接触分析的方法,属于非线性振动理论分析领域,该方法考虑齿轮副弹性变形,支撑系统扭转,齿轮加工误差和机床设置误差,推导出一种新的误差加载接触分析方法。本发明方法当对一个加载齿面接触分析时能够更加贴近真实情况,本发明方法通常用于解决在加载、传递误差、载荷分布和加工仿真下的真实接触面积通过V-H-J(V是齿轮副的纵向设置参数,并且小齿轮的向上方向是主动的;H是齿轮副的坐标轴设置参数,并且朝向小齿轮大端方向是主动的;J是沿着坐标轴方向的调整参数,并且小齿轮远离大齿轮的方向

螺旋锥齿轮误差齿面及差曲面的建立与分析.docx
螺旋锥齿轮误差齿面及差曲面的建立与分析随着机械加工技术的发展,齿轮已成为各种机械传动中不可或缺的部件,特别是在汽车、机床、航空、航天等领域中,更是齿轮传动技术的重要组成部分。而螺旋锥齿轮作为一种常见的齿轮传动形式,由于其具有传递大扭矩、精度高、启动平稳等特点,因此已广泛应用于各个领域。对其误差齿面及差曲面的建立与分析,则是提高螺旋锥齿轮传动精度、降低齿轮噪声的重要手段。误差齿面和差曲面的本质是齿面形状的修正。在一般情况下,机械齿轮强制在理论几何齿形下运动时,由于制造误差或安装误差,其齿面本身存在一定程度的
弧齿锥齿轮含安装误差的齿面载荷接触性能数值计算方法.pdf
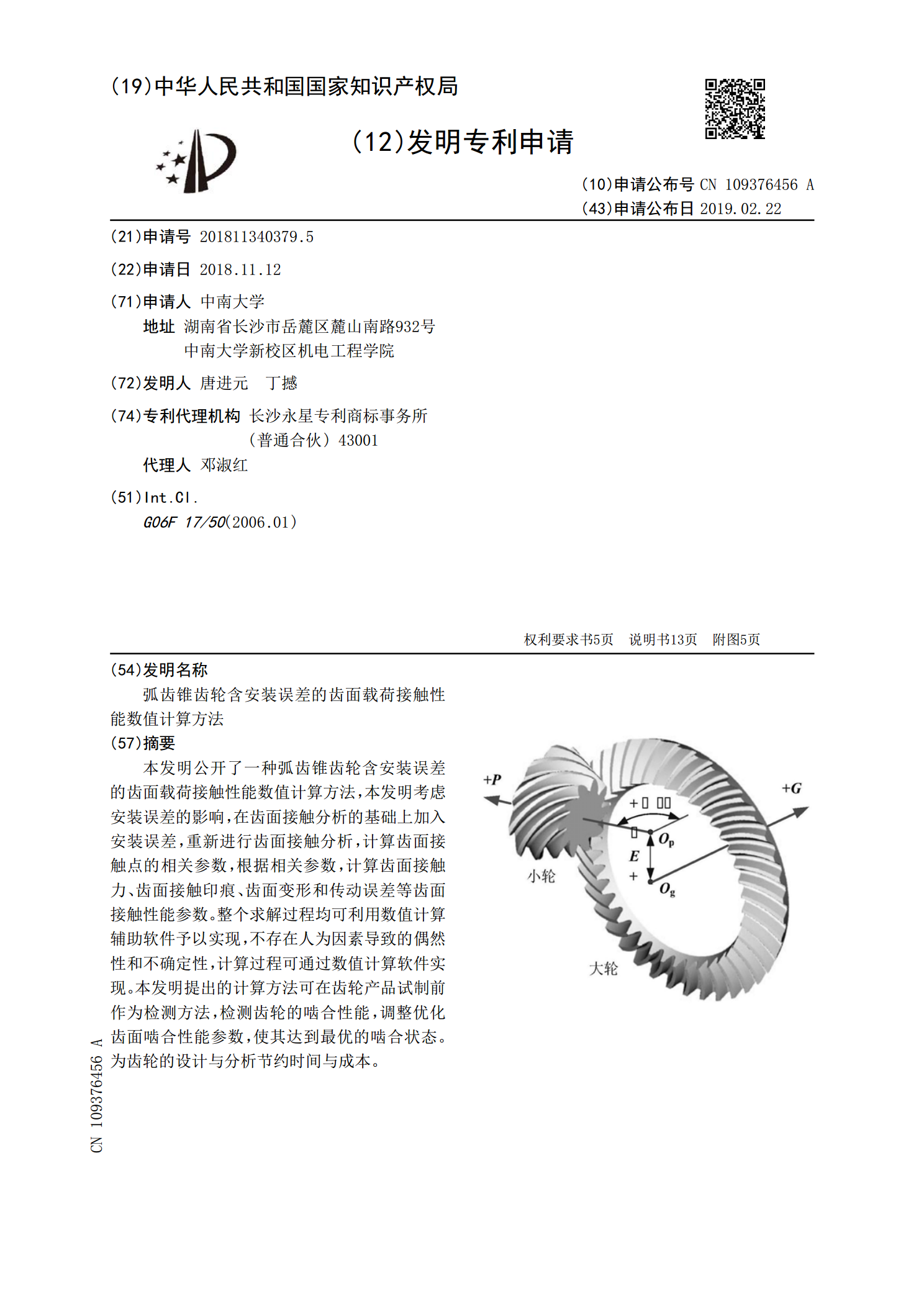
本发明公开了一种弧齿锥齿轮含安装误差的齿面载荷接触性能数值计算方法,本发明考虑安装误差的影响,在齿面接触分析的基础上加入安装误差,重新进行齿面接触分析,计算齿面接触点的相关参数,根据相关参数,计算齿面接触力、齿面接触印痕、齿面变形和传动误差等齿面接触性能参数。整个求解过程均可利用数值计算辅助软件予以实现,不存在人为因素导致的偶然性和不确定性,计算过程可通过数值计算软件实现。本发明提出的计算方法可在齿轮产品试制前作为检测方法,检测齿轮的啮合性能,调整优化齿面啮合性能参数,使其达到最优的啮合状态。为齿轮的设计
螺旋锥齿轮凹模齿面设计方法及螺旋锥齿轮加工方法.pdf
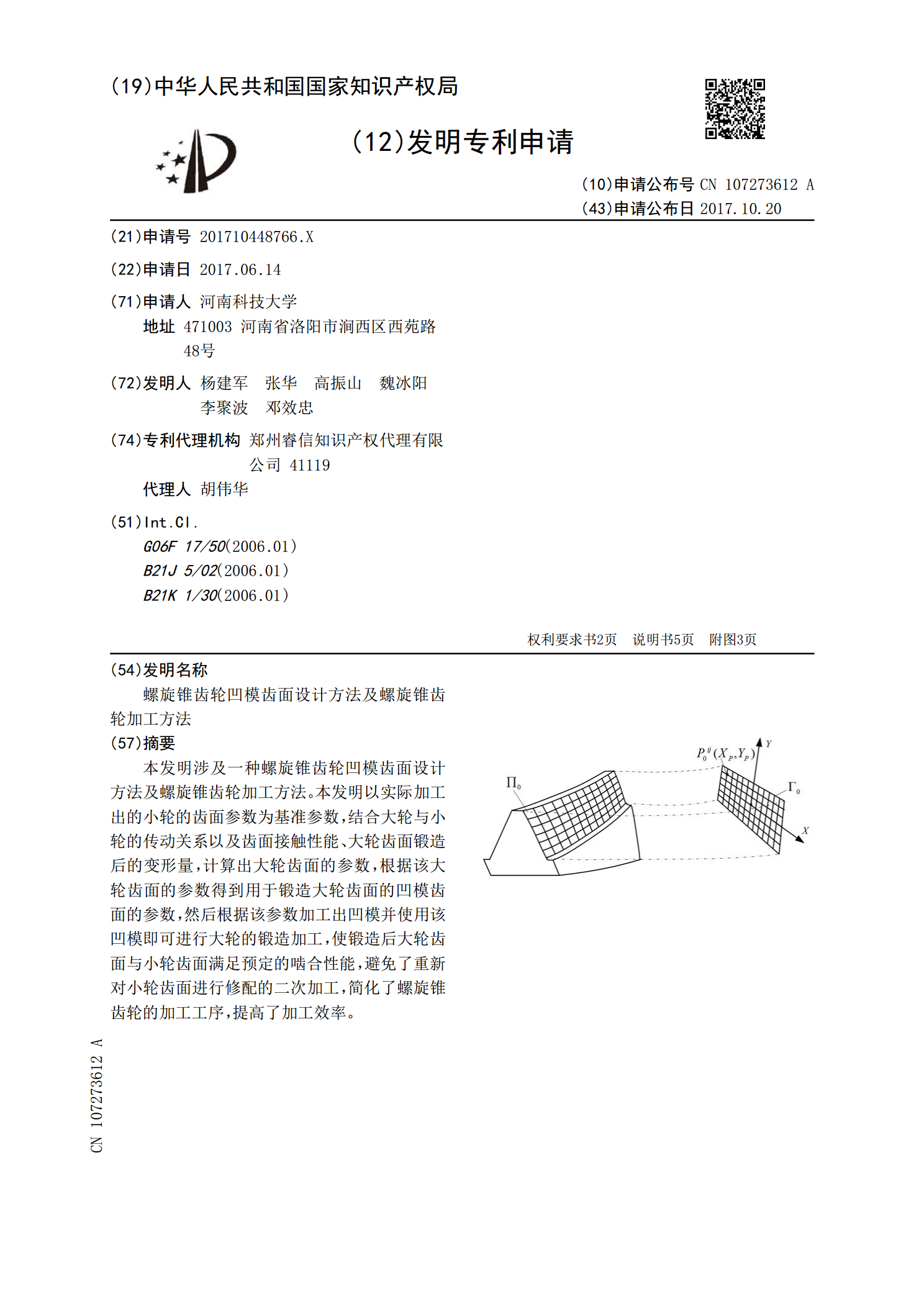
本发明涉及一种螺旋锥齿轮凹模齿面设计方法及螺旋锥齿轮加工方法。本发明以实际加工出的小轮的齿面参数为基准参数,结合大轮与小轮的传动关系以及齿面接触性能、大轮齿面锻造后的变形量,计算出大轮齿面的参数,根据该大轮齿面的参数得到用于锻造大轮齿面的凹模齿面的参数,然后根据该参数加工出凹模并使用该凹模即可进行大轮的锻造加工,使锻造后大轮齿面与小轮齿面满足预定的啮合性能,避免了重新对小轮齿面进行修配的二次加工,简化了螺旋锥齿轮的加工工序,提高了加工效率。