
一种花椒采摘机器人.pdf

Jo****63


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能花椒采摘机器人的采摘装置.pdf
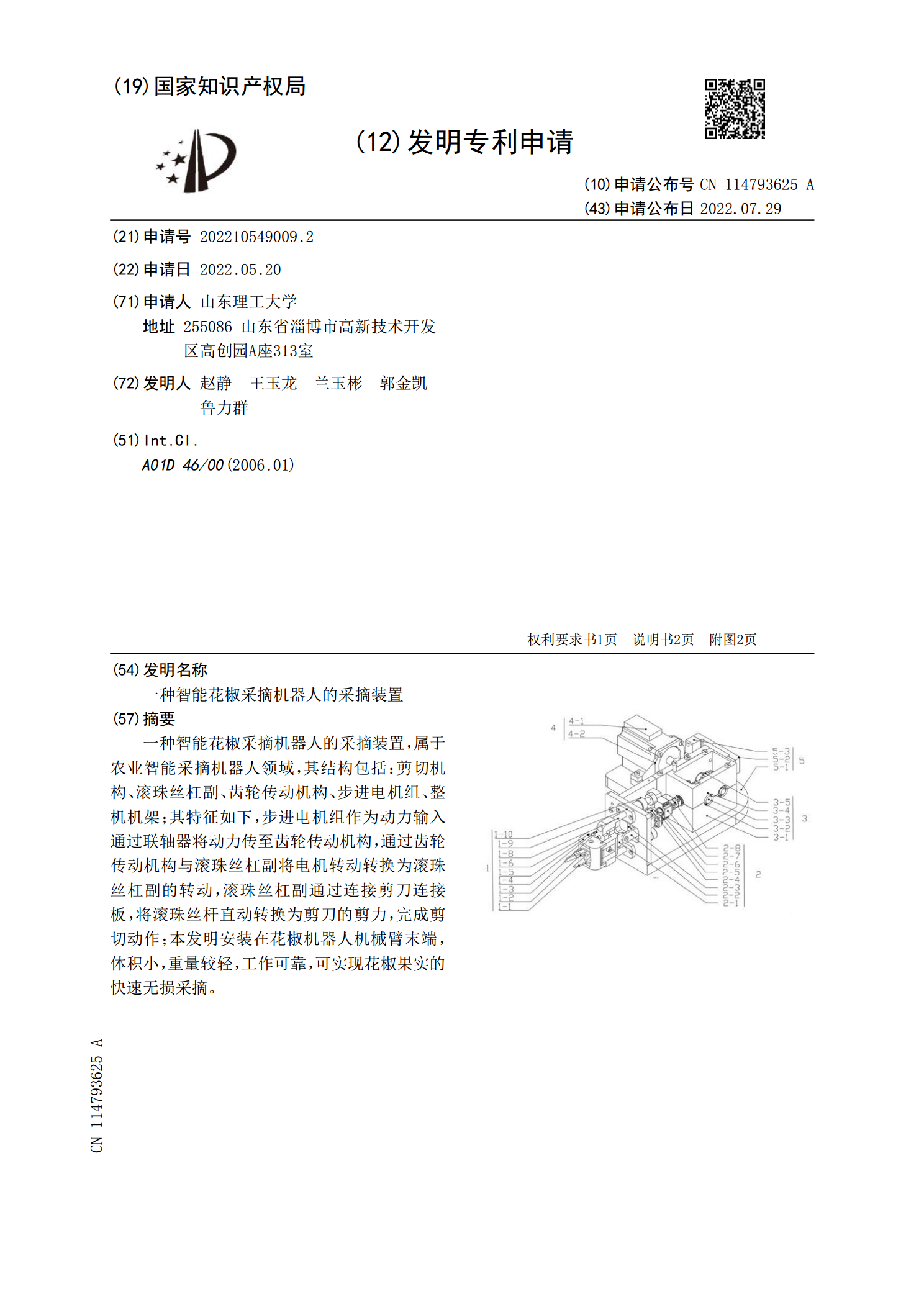
一种智能花椒采摘机器人的采摘装置,属于农业智能采摘机器人领域,其结构包括:剪切机构、滚珠丝杠副、齿轮传动机构、步进电机组、整机机架;其特征如下,步进电机组作为动力输入通过联轴器将动力传至齿轮传动机构,通过齿轮传动机构与滚珠丝杠副将电机转动转换为滚珠丝杠副的转动,滚珠丝杠副通过连接剪刀连接板,将滚珠丝杆直动转换为剪刀的剪力,完成剪切动作;本发明安装在花椒机器人机械臂末端,体积小,重量较轻,工作可靠,可实现花椒果实的快速无损采摘。

一种花椒采摘机器人.pdf
本发明公开了一种花椒采摘机器人,包括车体,所述第一往复丝杆的端部固定安装有第一带轮,所述第一带轮通过传动带与第二带轮传动连接,所述第二带轮与第一电机转动连接,所述右旋螺母和左旋螺母的上方均通过安装架固定安装有安装板,所述安装板的与橡胶夹板固定连接,所述导轨的中部固定安装有活动板,所述活动板的中部固定安装有收集箱,所述活动板固定安装于活动螺母的上端,所述活动螺母设置于第二往复丝杆的外侧,所述第二往复丝杆的端部固定安装有第一锥形齿轮,所述第一锥形齿轮与第二锥形齿轮传动连接,所述第二锥形齿轮与第二电机转动连接。

一种花椒采摘系统、花椒采摘方法及采摘车移动方法.pdf
本发明公开了一种花椒采摘系统、花椒采摘方法及采摘车移动方法,所述系统包括采摘装置和若干个双目摄像头,所述采摘装置包括若干采摘机构和若干机械臂,所述机械臂的一端与采摘车连接,且另一端与采摘机构、双目摄像头连接,所述采摘机构包括空心转筒和第一电机,所述第一电机位于机械臂上,所述第一电机的输出轴与空心转筒的一端连接,所述空心转筒的另一端开口设置,所述空心转筒的内部沿周向设置有若干个扇叶,且侧壁沿周向设置有贯通的若干组通风孔,所述空心转筒的外侧壁沿周向设置有若干组采摘部,所述采摘部包括若干个采摘凸起,相邻采摘凸起

智能花椒采摘机器人设计与应用.docx
智能花椒采摘机器人设计与应用1.内容概括随着工业自动化与智能机器人技术的不断进步,传统的花椒采摘作业面临转型升级的需求。智能花椒采摘机器人的设计与应用应运而生,旨在提高采摘效率、降低人工成本,并应对花椒种植业的季节性劳动力短缺问题。本文档将详细介绍智能花椒采摘机器人的设计原理、应用情况以及未来发展趋势。智能花椒采摘机器人设计基于先进的计算机视觉技术、机械臂技术和人工智能算法。通过深度学习训练,机器人能够识别花椒树的特征,并精准定位成熟的花椒果实。设计过程中,重点考虑机械臂的灵活性和强度,以确保在不同生长环

一种花椒采摘设备.pdf
本发明属于一种农作物收获设备,特别涉及一种花椒采摘设备。本发明公开设备分为四个系统,一是剪切系统,由固定刀片(10)、旋转刀片(11)、刀具传动轴(25)等组成;二是回收系统,由弹性刷毛(26)、下壳体(8)、上壳体(17)防护罩(5)、收纳袋(7)等组成;三是动力传输系统,由电机防护罩(1)、电机(2)、电机传动轴(14)、风扇叶片(15)等组成;四是操纵控制系统,由工作手柄(21)、点动按钮(23)、电源组件(24)等组成。本发明用于花椒采摘工作,解决了现有技术中劳动强度大,切削下的花椒果实不同时回收