
智能花椒采摘机器人设计与应用.docx

92****sc


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共44页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能花椒采摘机器人设计与应用.docx
智能花椒采摘机器人设计与应用1.内容概括随着工业自动化与智能机器人技术的不断进步,传统的花椒采摘作业面临转型升级的需求。智能花椒采摘机器人的设计与应用应运而生,旨在提高采摘效率、降低人工成本,并应对花椒种植业的季节性劳动力短缺问题。本文档将详细介绍智能花椒采摘机器人的设计原理、应用情况以及未来发展趋势。智能花椒采摘机器人设计基于先进的计算机视觉技术、机械臂技术和人工智能算法。通过深度学习训练,机器人能够识别花椒树的特征,并精准定位成熟的花椒果实。设计过程中,重点考虑机械臂的灵活性和强度,以确保在不同生长环
一种智能花椒采摘机器人的采摘装置.pdf
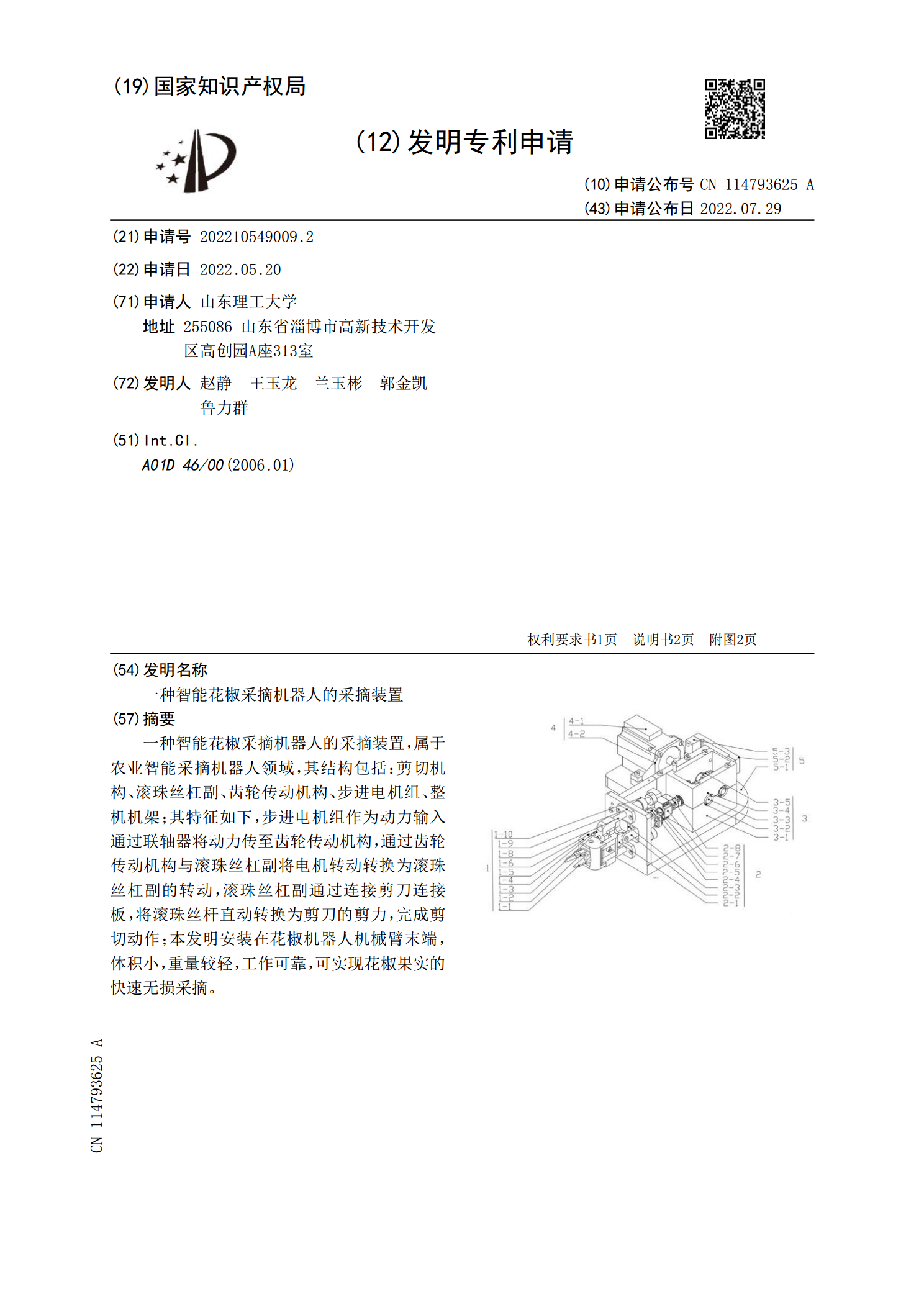
一种智能花椒采摘机器人的采摘装置,属于农业智能采摘机器人领域,其结构包括:剪切机构、滚珠丝杠副、齿轮传动机构、步进电机组、整机机架;其特征如下,步进电机组作为动力输入通过联轴器将动力传至齿轮传动机构,通过齿轮传动机构与滚珠丝杠副将电机转动转换为滚珠丝杠副的转动,滚珠丝杠副通过连接剪刀连接板,将滚珠丝杆直动转换为剪刀的剪力,完成剪切动作;本发明安装在花椒机器人机械臂末端,体积小,重量较轻,工作可靠,可实现花椒果实的快速无损采摘。

智能移动水果采摘机器人的设计.docx
智能移动水果采摘机器人的设计摘要设计一种机器人用来移动水果和采摘水果的智能产物。该机器人由尾端执行器、采摘机械臂、横向的移动机构、智能移动平台以及相关的控制系统组成由C语言程序编写的控制程序开发人机能够相互交流的界面。整个系统工作性能较为稳定对成熟果实的正确识别率为81.5%成功采摘率为87.1%每个水果的采摘耗时平均为9.45s。关键词采摘机器人机器视觉移动平台水果中图分类号:TP242文献标识码:A0前言历年来水果生产
智能移动水果采摘机器人的设计.docx
智能移动水果采摘机器人的设计摘要设计一种机器人用来移动水果和采摘水果的智能产物。该机器人由尾端执行器、采摘机械臂、横向的移动机构、智能移动平台以及相关的控制系统组成由C语言程序编写的控制程序开发人机能够相互交流的界面。整个系统工作性能较为稳定对成熟果实的正确识别率为81.5%成功采摘率为87.1%每个水果的采摘耗时平均为9.45s。关键词采摘机器人机器视觉移动平台水果中图分类号:TP242文献标识码:A0前言历年来水果生产

一种花椒采摘机器人.pdf
本发明公开了一种花椒采摘机器人,包括车体,所述第一往复丝杆的端部固定安装有第一带轮,所述第一带轮通过传动带与第二带轮传动连接,所述第二带轮与第一电机转动连接,所述右旋螺母和左旋螺母的上方均通过安装架固定安装有安装板,所述安装板的与橡胶夹板固定连接,所述导轨的中部固定安装有活动板,所述活动板的中部固定安装有收集箱,所述活动板固定安装于活动螺母的上端,所述活动螺母设置于第二往复丝杆的外侧,所述第二往复丝杆的端部固定安装有第一锥形齿轮,所述第一锥形齿轮与第二锥形齿轮传动连接,所述第二锥形齿轮与第二电机转动连接。