
全自动卷料搬运AGV机器人及其控制方法.pdf

一条****杉淑


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
全自动卷料搬运AGV机器人及其控制方法.pdf
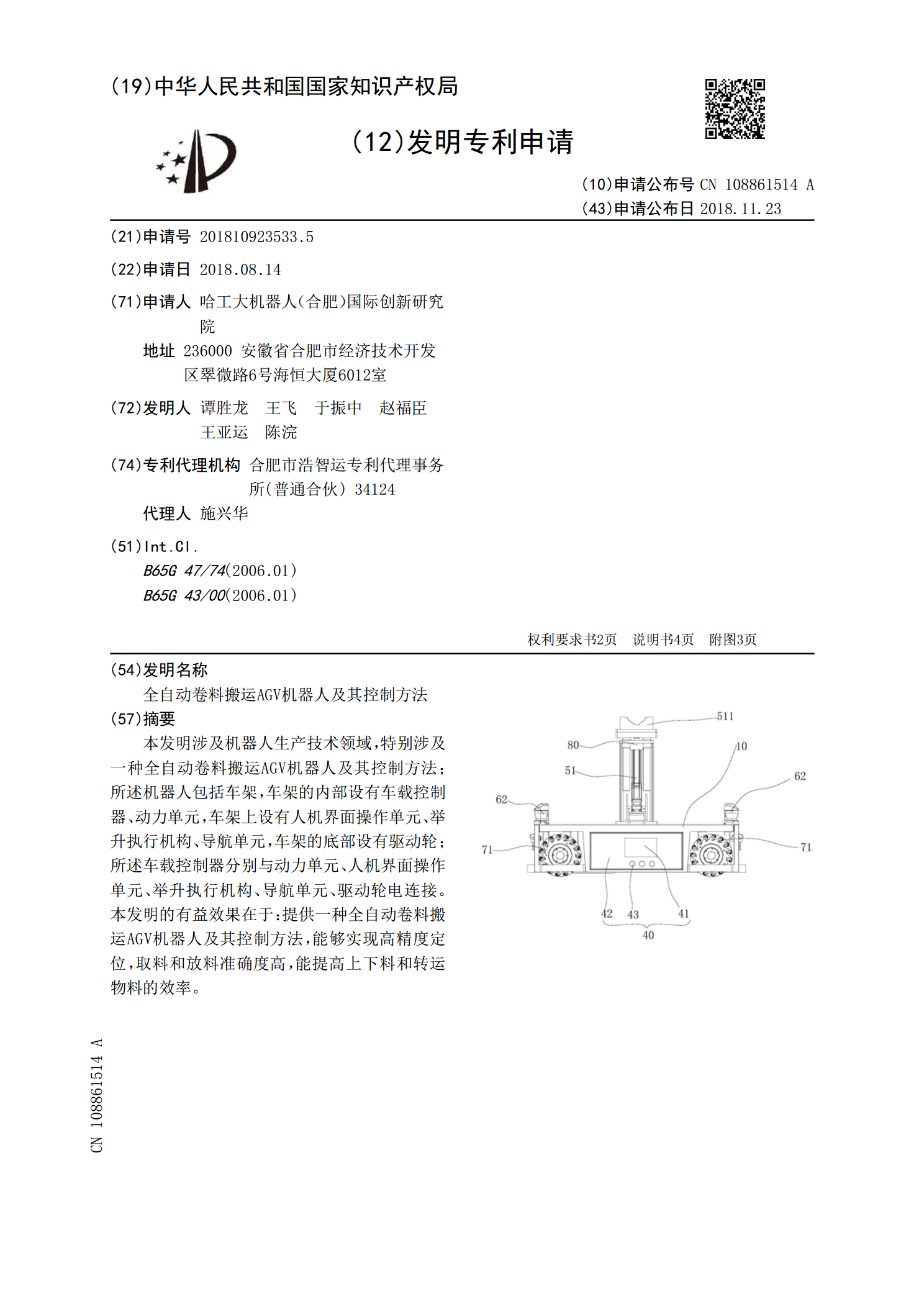
本发明涉及机器人生产技术领域,特别涉及一种全自动卷料搬运AGV机器人及其控制方法;所述机器人包括车架,车架的内部设有车载控制器、动力单元,车架上设有人机界面操作单元、举升执行机构、导航单元,车架的底部设有驱动轮;所述车载控制器分别与动力单元、人机界面操作单元、举升执行机构、导航单元、驱动轮电连接。本发明的有益效果在于:提供一种全自动卷料搬运AGV机器人及其控制方法,能够实现高精度定位,取料和放料准确度高,能提高上下料和转运物料的效率。

一种汽车自动搬运AGV及其控制方法.pdf
一种汽车自动搬运AGV及其控制方法,属于汽车自动搬运技术领域。汽车自动搬运AGV包括整体框架、控制系统、导航系统及驱动轮,所述整体框架的一侧连接有可移动夹臂,所述夹臂为4个,分为两组,分别对应待搬运汽车的前轮和后轮;每组中的夹臂对称设置,其相对侧均设置有两组夹紧汽车两侧轮胎的夹持部件;通过每组夹臂的相对运动夹持汽车轮胎。本发明AGV不需要载车板、直接通过抱住车辆轮胎,使车辆离开地面,直接移动。同时也由于车辆的轴距远小于车长,因此本发明的AGV本身也可以设计得比较小。

智能AGV搬运机器人.pdf
本发明公开一种智能AGV搬运机器人,其包括车架、控制模块、磁导航模块、前轮驱动机构、后轮从动机构和转向机构;控制模块、磁导航模块、前轮驱动机构和后轮从动机构均安装在车架上;控制模块与磁导航模块、前轮驱动机构和转向机构相连;车架上设置有内齿圈;转向机构安装在前轮驱动机构上,转向机构包括第一电机以及与第一电机相连的第一转向主动齿轮,第一主动齿轮与内齿圈啮合。本发明的技术方案中,通过第一电机驱动第一转向主动齿轮转动,带动前轮驱动机构旋转,从而实现智能AGV搬运机器人的转向,使得智能AGV搬运机器人的转向驱动一体

物流搬运机器人-AGV.pdf
物流搬运-AGV【正文】一、物流搬运-AGV设计概述:1.1项目背景物流行业的发展,对物流搬运工作提出了更高的要求,传统的人工搬运已经无法满足需求。因此,AGV(AutomatedGuidedVehicle)搬运被引入物流行业,以提高效率和减轻工人劳动强度。1.2功能物流搬运-AGV是一种能够自主导航、搬运货物的智能。其主要功能包括:-货物搬运:能够自动识别和搬运各种类型和大小的货物;-导航系统:通过激光、摄像头等传感器实现自主导航;-运动控制:能够根据场景需求灵活调整速度和运动方向;-通信功能:能够与物

货物搬运机器人及其控制方法.pdf
本公开涉及一种货物搬运机器人及其控制方法,该机器人包括底盘组件、门架组件、升降组件和至少两个辅助支撑装置;门架组件设置在底盘组件上,升降组件被配置为沿着门架组件的延伸方向移动,至少两个辅助支撑装置受控于各自的驱动组件,并分别分布在货物搬运机器人对的两侧,至少两个辅助支撑装置被构造为相对于货物搬运机器人伸出至与货物搬运机器人对应侧的料架相抵或分离。本公开的货物搬运机器人,可以保证其工作时的稳定性和安全性。