
一种工业自动化流水线用弹性拾取装置.pdf

小沛****文章


1/8

2/8

3/8
4/8
5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种工业自动化流水线用弹性拾取装置.pdf
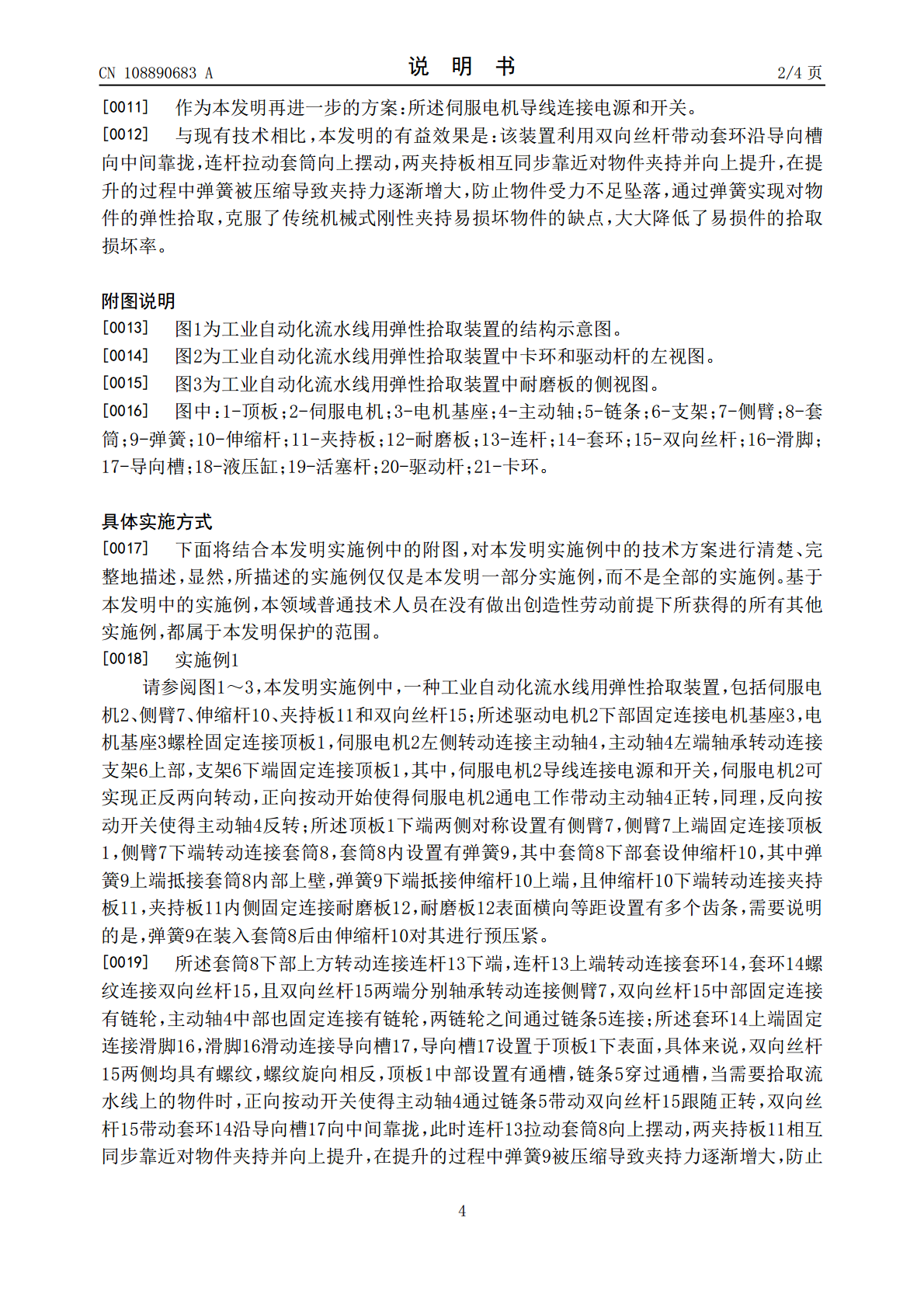
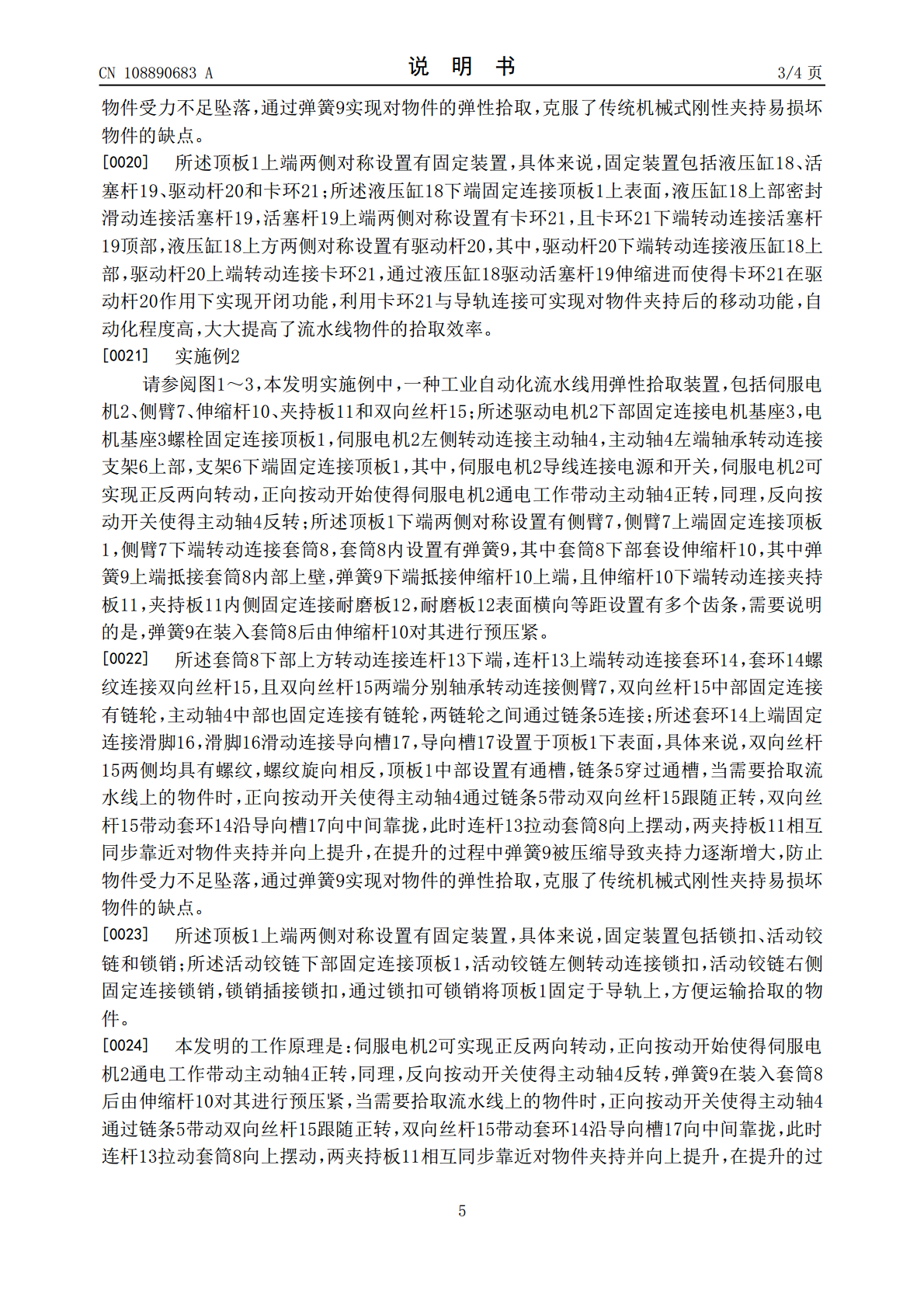
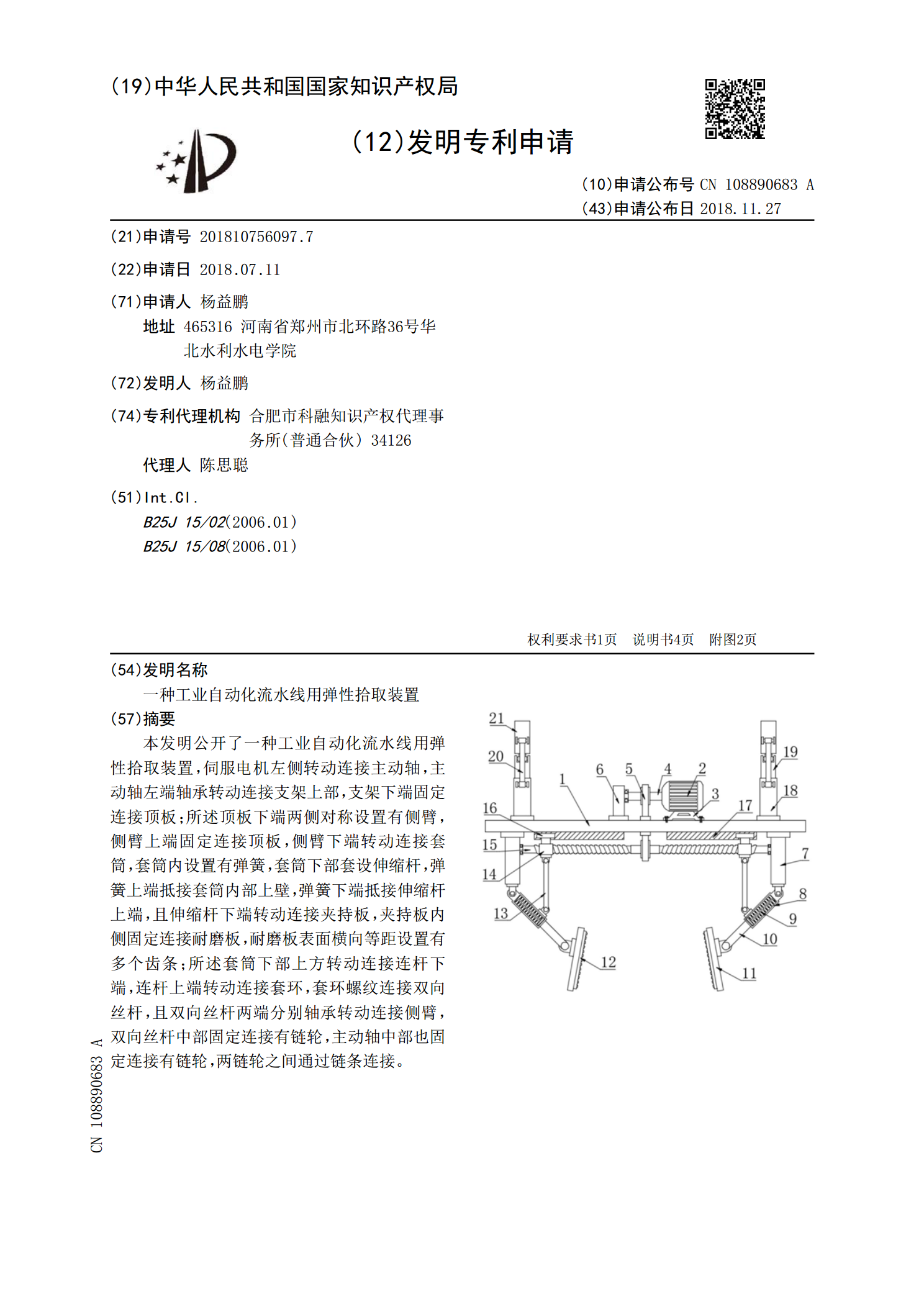
本发明公开了一种工业自动化流水线用弹性拾取装置,伺服电机左侧转动连接主动轴,主动轴左端轴承转动连接支架上部,支架下端固定连接顶板;所述顶板下端两侧对称设置有侧臂,侧臂上端固定连接顶板,侧臂下端转动连接套筒,套筒内设置有弹簧,套筒下部套设伸缩杆,弹簧上端抵接套筒内部上壁,弹簧下端抵接伸缩杆上端,且伸缩杆下端转动连接夹持板,夹持板内侧固定连接耐磨板,耐磨板表面横向等距设置有多个齿条;所述套筒下部上方转动连接连杆下端,连杆上端转动连接套环,套环螺纹连接双向丝杆,且双向丝杆两端分别轴承转动连接侧臂,双向丝杆中部固

一种流水线用自动化摆动式负压拾取装置.pdf
本发明公开了一种流水线用自动化摆动式负压拾取装置,具体是一种通过液压组件带动活动杆往复上下移动,从而驱动吸附组件在导向块和滚轮的作用下一边上下移动,一边倾斜摆动,达到连续自动拾取物品功能的装置,其有效解决了现有的流水线上机械手拾取大多通过编程控制,使用成本较高的问题。液压组件包括固定在安装板上方一侧的液压缸、密封滑动连接在液压缸一侧的活塞杆、一端铰接在活塞杆端部另一端铰接在活动杆上端的连杆,其中,活动杆套设于固定在安装板上的导向套上。

一种自动化流水线用运输装置.pdf
本发明公开了一种自动化流水线用运输装置,包括主框架,所述主框架的底部设置有支撑架,主框架的尾端连接有延伸框架,延伸框架的底部固定有调节支腿,主框架的首端设置有回收盒,位于主框架底部首端的支撑架外表面横向固定有横板,横板的底部固定有安装架,安装架包括支撑板、固定于支撑板顶部四角的立柱以及分布于立柱顶端的安装座;延伸框架和调节支腿,便于将运输装置连接其他不同的机械,适用范围更加广泛;驱动电机配合第一伸缩弹簧以及第二伸缩弹簧,能够实现缓冲减震并降低噪声,使用寿命更长;通过滑动卡合安装的回收盒,较现有的直接悬挂的
一种流水线用机械自动化抓取装置.pdf
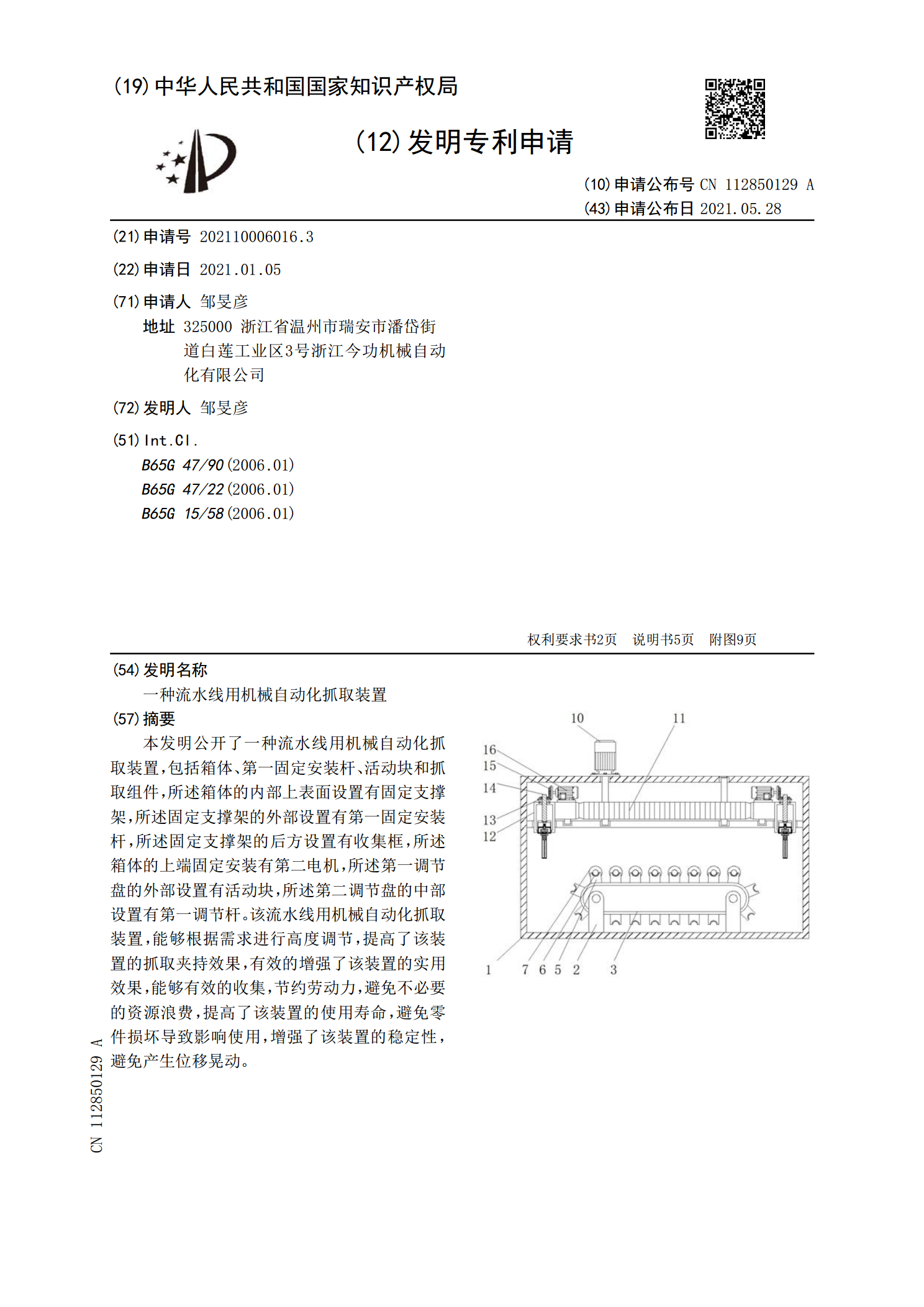
本发明公开了一种流水线用机械自动化抓取装置,包括箱体、第一固定安装杆、活动块和抓取组件,所述箱体的内部上表面设置有固定支撑架,所述固定支撑架的外部设置有第一固定安装杆,所述固定支撑架的后方设置有收集框,所述箱体的上端固定安装有第二电机,所述第一调节盘的外部设置有活动块,所述第二调节盘的中部设置有第一调节杆。该流水线用机械自动化抓取装置,能够根据需求进行高度调节,提高了该装置的抓取夹持效果,有效的增强了该装置的实用效果,能够有效的收集,节约劳动力,避免不必要的资源浪费,提高了该装置的使用寿命,避免零件损坏导

一种工业用流水线式自动化热处理方法及设备.pdf
本发明公开了一种工业用流水线式自动化热处理方法及设备,通过进料机构、进料过渡室、第一热处理炉体、中转过渡室、第二热处理炉体、出料过渡室及出料机构的相互配合,流水线式依次设置,然后由转辊输送机构相连接,进行工件输送,从而实现工件的流线线式自动化热处理;整个过程,由转辊输送机构配合升降密封门来进行无缝衔接,由温度发生控制系统及气压发生控制系统来进行智能控温控压,实现热处理炉体的最大化利用,效率高,品质好,安全性高。