
一种机械生产车间内用工业机器人及使用方法.pdf

是丹****ni


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种机械生产车间内用工业机器人及使用方法.pdf
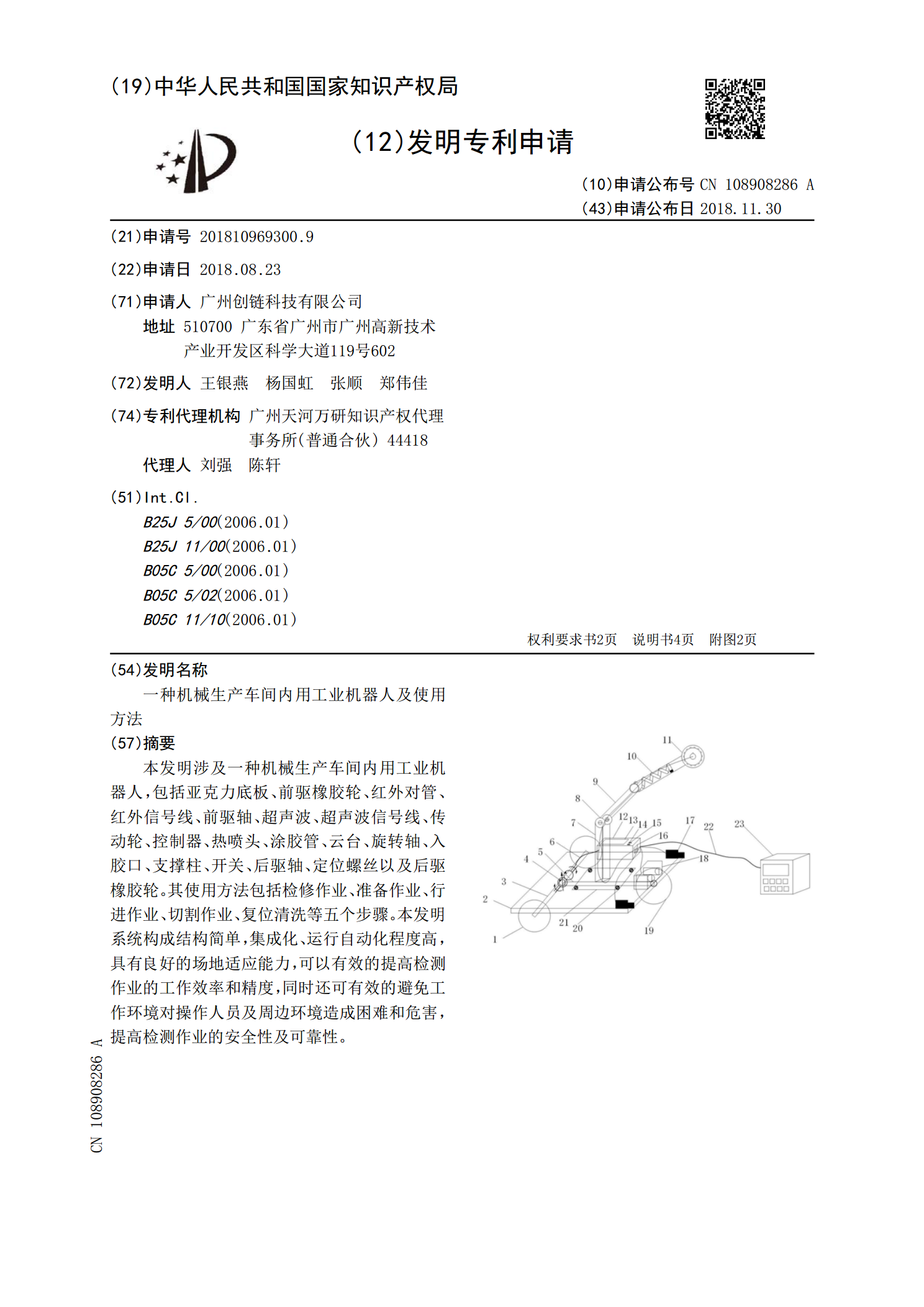
本发明涉及一种机械生产车间内用工业机器人,包括亚克力底板、前驱橡胶轮、红外对管、红外信号线、前驱轴、超声波、超声波信号线、传动轮、控制器、热喷头、涂胶管、云台、旋转轴、入胶口、支撑柱、开关、后驱轴、定位螺丝以及后驱橡胶轮。其使用方法包括检修作业、准备作业、行进作业、切割作业、复位清洗等五个步骤。本发明系统构成结构简单,集成化、运行自动化程度高,具有良好的场地适应能力,可以有效的提高检测作业的工作效率和精度,同时还可有效的避免工作环境对操作人员及周边环境造成困难和危害,提高检测作业的安全性及可靠性。

一种适用于机械生产车间内使用的工业机器人.pdf
本发明公开了一种适用于机械生产车间内使用的工业机器人,包括第一外壳和第二外壳,所述第一外壳的内部上方设有移动装置,所述螺杆的外壁与厚板的上方内壁螺纹相连,所述厚板的顶部固接有第一滑块,所述第一滑块的外壁与第一外壳的内壁顶部凹槽滑动卡接,所述厚板的底部凹槽间隙配合有竖板,所述竖板的底部固接有磨轮,所述竖板的两侧均设有第一螺栓,两个所述第一螺栓的外壁与厚板的左右两侧下方螺纹相连,并与竖板的左右两侧相抵紧。该装置通过第一螺栓、第一滑块和螺杆之间的配合,转动第一螺栓可改变磨轮的高度,解决了无法改变磨轮高度的问题,

一种适用于机械生产车间内使用的工业机器人.pdf
本发明公开了一种适用于机械生产车间内使用的工业机器人,包括壳体,所述壳体的底部设置有驱动轮,所述壳体的内壁顶部固定连接有第一推杆,所述第一推杆的底部固定连接有第一铰接座,所述第一铰接座的底部铰接有检测盘,所述检测盘的底部设置有活动柱,所述壳体的内壁顶部固定连接有第二推杆,所述第二推杆的底部活动连接有标记刷板,所述第二推杆的正面设置有速度传感器,所述壳体的顶部开设有滑动槽,所述滑动槽的内壁滑动连接有滑动块,所述滑动块的一侧固定连接有丝杆。本发明解决了现有的钢板或钢材的平整度检测方式大多是人工使用测量工具进行

一种适用于机械生产车间内使用的快速检测工业机器人.pdf
本发明公开了一种适用于机械生产车间内使用的快速检测工业机器人,包括壳体,所述壳体的底部设置有驱动轮,所述壳体的内壁顶部固定连接有第一推杆,所述第一推杆的底部固定连接有第一铰接座,所述第一铰接座的底部铰接有检测盘,所述检测盘的底部设置有活动柱,所述壳体的内壁顶部固定连接有第二推杆,所述第二推杆的底部活动连接有标记刷板,所述第二推杆的正面设置有速度传感器,所述壳体的顶部开设有滑动槽,所述滑动槽的内壁滑动连接有滑动块,所述滑动块的一侧固定连接有丝杆。本发明解决了现有的钢板或钢材的平整度检测方式大多是人工使用测量

一种新型工业机器人用液压车.pdf
本发明公开了一一种新型工业机器人用液压车,包括用于安装工业机器人的承重板和主体结构,所述主体结构为液压车的所有组成结构,主要包括:主轴箱内结构件、装卡结构、差速传动机构、转轮机构;所述工业机器人下端设置有所述装卡机构,所述装卡机构将所述工业机器人、承重板固定连接,所述承重板下端固定设置有主轴箱,所述主轴箱内设置有油泵容腔,本发明装置结构简单,使用方便,将液压系统运用到工业机器人用的液压小车上,且具备自适应的功能,自我调节位置,提高了装置的稳定性,最重要的是作为一个载体,提高了工业机器人的工作范围,及节省了