
一种智能叉取背负式无人搬运车控制方法.pdf

论文****可爱

1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种智能叉取背负式无人搬运车控制方法.pdf
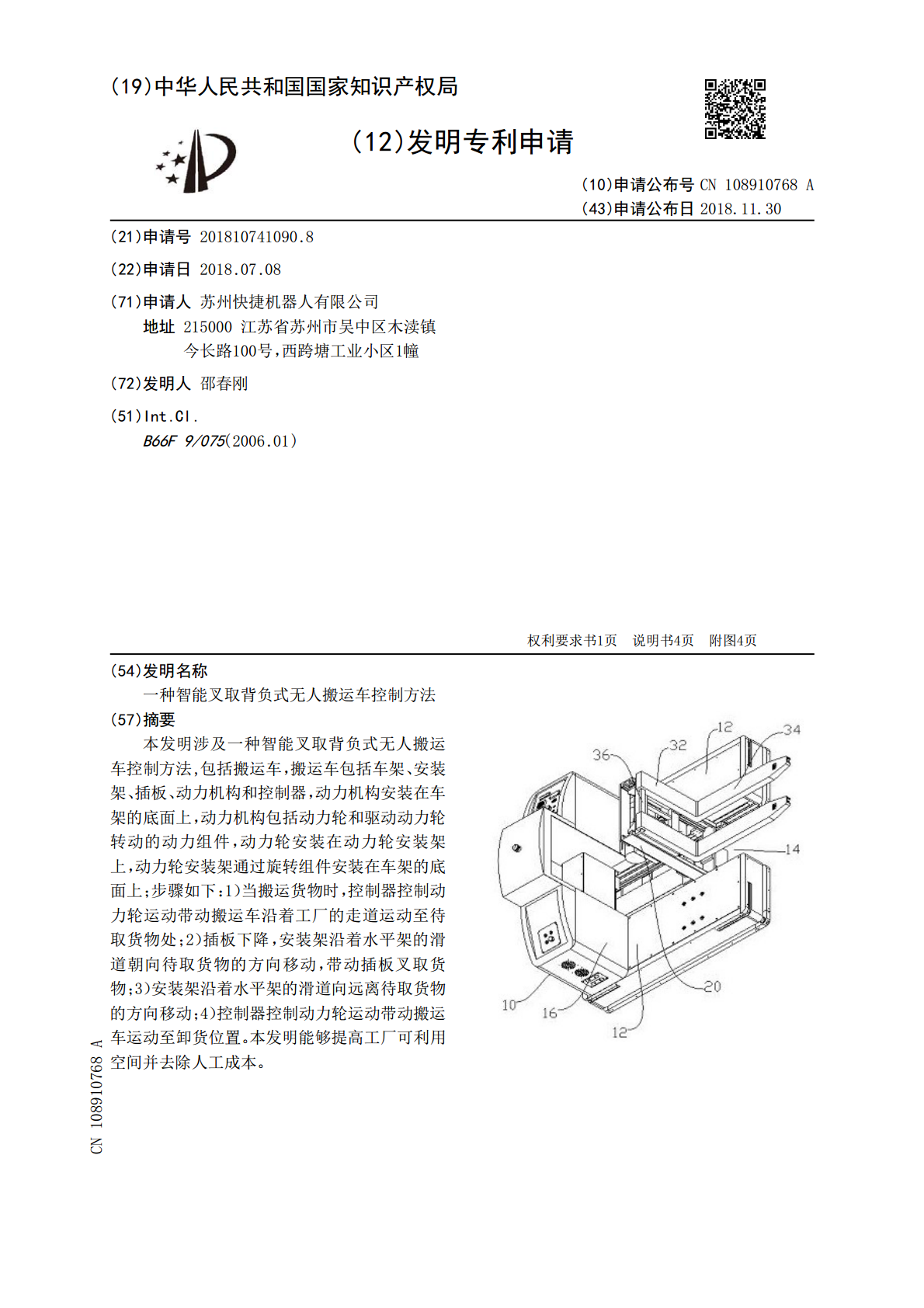
本发明涉及一种智能叉取背负式无人搬运车控制方法,包括搬运车,搬运车包括车架、安装架、插板、动力机构和控制器,动力机构安装在车架的底面上,动力机构包括动力轮和驱动动力轮转动的动力组件,动力轮安装在动力轮安装架上,动力轮安装架通过旋转组件安装在车架的底面上;步骤如下:1)当搬运货物时,控制器控制动力轮运动带动搬运车沿着工厂的走道运动至待取货物处;2)插板下降,安装架沿着水平架的滑道朝向待取货物的方向移动,带动插板叉取货物;3)安装架沿着水平架的滑道向远离待取货物的方向移动;4)控制器控制动力轮运动带动搬运车运

一种智能叉取背负式无人搬运车.pdf
本发明涉及一种智能叉取背负式无人搬运车,包括车架、安装架、插板和动力机构,车架包括设置在工作侧的水平架,水平架上设置有水平的滑道;安装架竖直设置并安装在水平架的滑道上,并可在驱动机构的驱动下沿着水平架水平移动,驱动机构包括链轮轴、安装在链轮轴上的链轮、安装在链轮上的链条以及驱动链轮轴转动的动力组件;插板可竖直滑动地安装在安装架上;动力机构安装在车架的底面上,动力机构包括动力轮和驱动动力轮转动的动力组件,动力轮安装在动力轮安装架上,动力轮安装架通过旋转组件安装在车架的底面上。本发明能够提高工厂可利用空间并去

一种无人叉车的自动叉取方法.pdf
本发明公开了一种无人叉车的自动叉取方法,具体涉及无人叉车技术领域,包括步骤:基于目标坐标系和叉车坐标系,通过视觉传感器获取目标托盘相对于叉车的叉取位姿;根据叉取位姿,基于位姿镇定算法控制叉车移动至目标托盘正前方的调校点;根据叉车实时的速度信息构建叉车的运动学模型;根据运动学模型构建叉车行进并叉取过程中,当前时刻叉车位姿与叉取位姿的误差方程;获取误差方程微分后的微分方程并带入轨迹跟踪控制律公式,获取下一时刻的速度信息;根据下一时刻的速度信息控制叉车进行速度状态调整直至叉车位姿到达叉取位姿。本发明将叉车的托盘

一种智能升降式无人搬运车.pdf
本发明涉及智能物流的技术领域,具体为一种智能升降式无人搬运车,包括搬运车主体、两个电动推杆、微调装置和支撑板,所述搬运车主体的顶部与内部连通设置有升降口,两个电动推杆分别安装搬运车主体内部的左侧和右侧,两个电动推杆的升降端均伸出升降口,所述微调装置安装在两个电动推杆升降端的顶部,微调装置包括微调箱、两个微调蜗轮、微调蜗杆和两个微调螺纹杆,所述微调箱的内部设置有微调腔,两个微调蜗轮分别与微调箱内部的左侧和右侧转动连接,微调箱的左侧和右侧分别连通设置有两个微调孔;其能够根据不同高度的搬运情况对货物进行智能升降
一种背负式的AGV搬运车.pdf
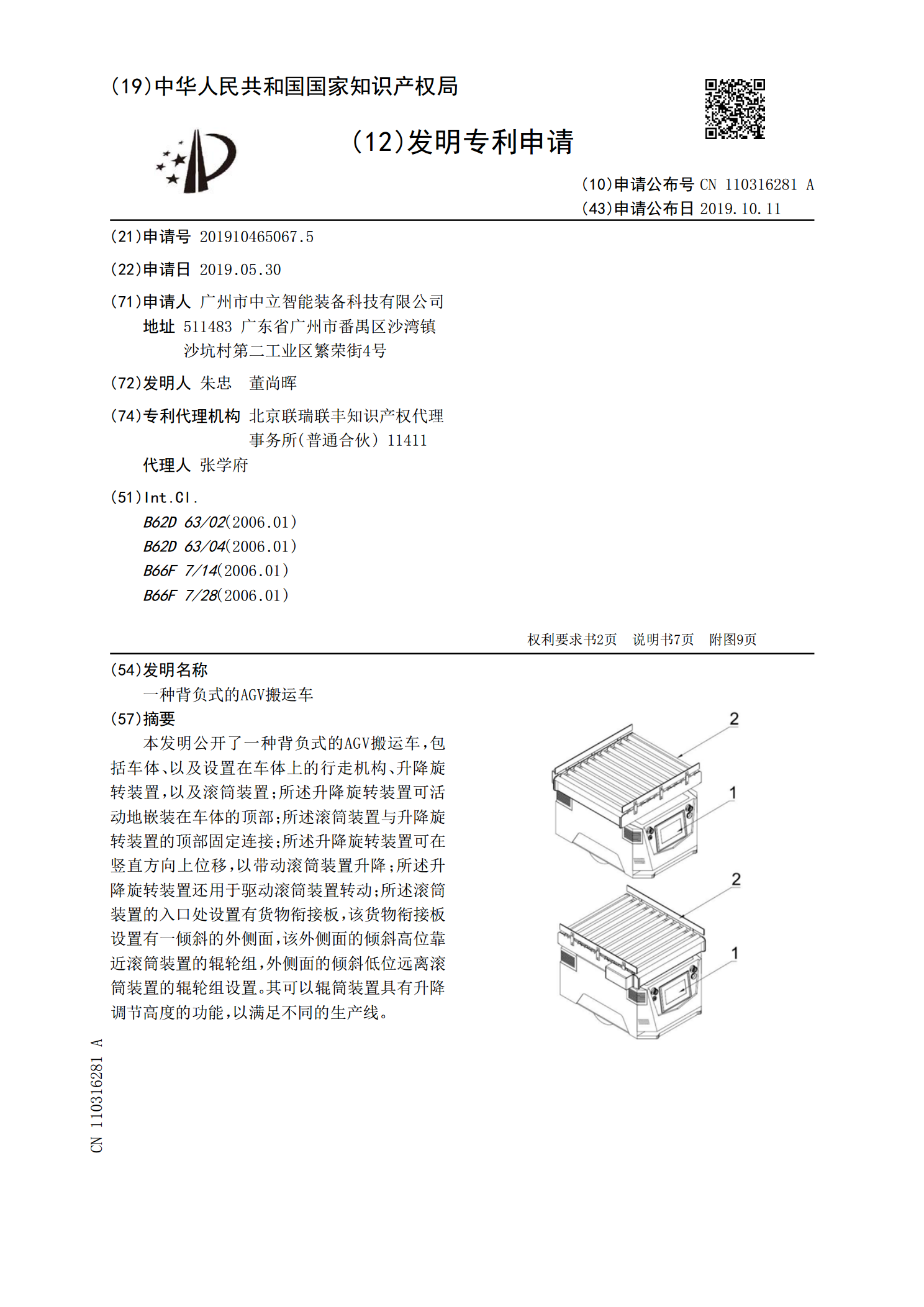
本发明公开了一种背负式的AGV搬运车,包括车体、以及设置在车体上的行走机构、升降旋转装置,以及滚筒装置;所述升降旋转装置可活动地嵌装在车体的顶部;所述滚筒装置与升降旋转装置的顶部固定连接;所述升降旋转装置可在竖直方向上位移,以带动滚筒装置升降;所述升降旋转装置还用于驱动滚筒装置转动;所述滚筒装置的入口处设置有货物衔接板,该货物衔接板设置有一倾斜的外侧面,该外侧面的倾斜高位靠近滚筒装置的辊轮组,外侧面的倾斜低位远离滚筒装置的辊轮组设置。其可以辊筒装置具有升降调节高度的功能,以满足不同的生产线。