
一种楼梯扶手清理机器人.pdf

明轩****la

1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种楼梯扶手清理机器人.pdf
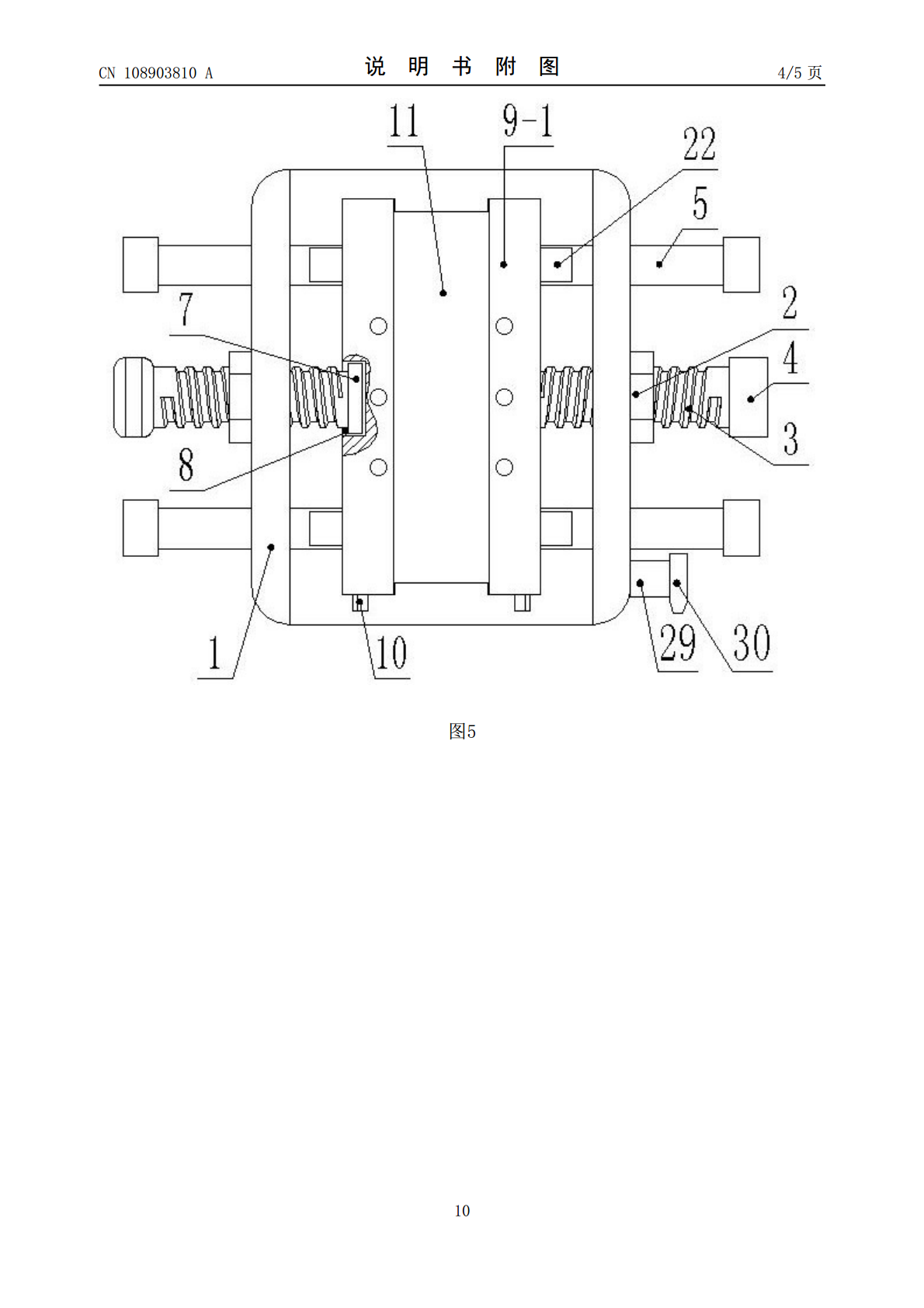
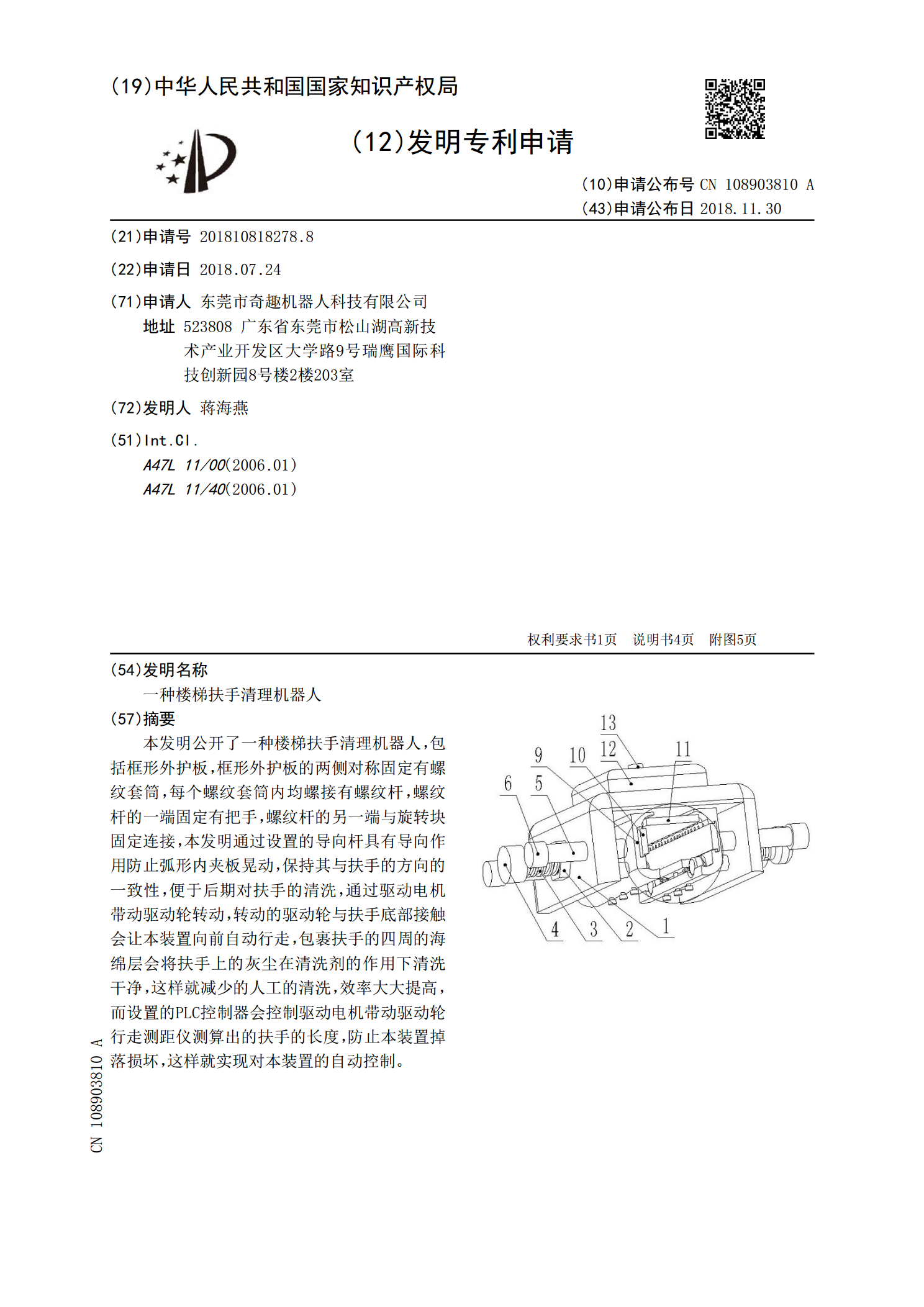
本发明公开了一种楼梯扶手清理机器人,包括框形外护板,框形外护板的两侧对称固定有螺纹套筒,每个螺纹套筒内均螺接有螺纹杆,螺纹杆的一端固定有把手,螺纹杆的另一端与旋转块固定连接,本发明通过设置的导向杆具有导向作用防止弧形内夹板晃动,保持其与扶手的方向的一致性,便于后期对扶手的清洗,通过驱动电机带动驱动轮转动,转动的驱动轮与扶手底部接触会让本装置向前自动行走,包裹扶手的四周的海绵层会将扶手上的灰尘在清洗剂的作用下清洗干净,这样就减少的人工的清洗,效率大大提高,而设置的PLC控制器会控制驱动电机带动驱动轮行走测距
一种楼梯扶手清理装置.pdf
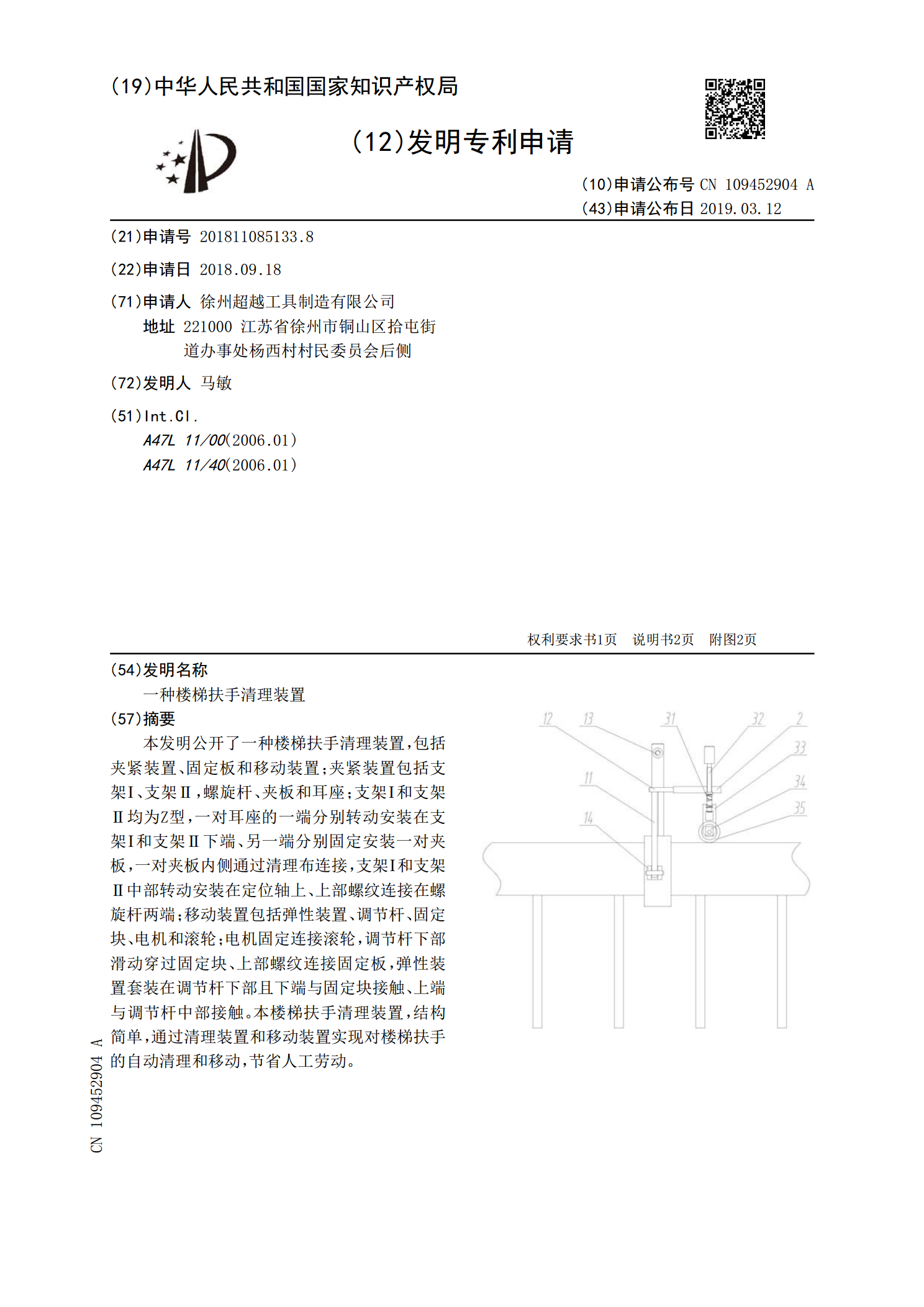
本发明公开了一种楼梯扶手清理装置,包括夹紧装置、固定板和移动装置;夹紧装置包括支架Ⅰ、支架Ⅱ,螺旋杆、夹板和耳座;支架Ⅰ和支架Ⅱ均为Z型,一对耳座的一端分别转动安装在支架Ⅰ和支架Ⅱ下端、另一端分别固定安装一对夹板,一对夹板内侧通过清理布连接,支架Ⅰ和支架Ⅱ中部转动安装在定位轴上、上部螺纹连接在螺旋杆两端;移动装置包括弹性装置、调节杆、固定块、电机和滚轮;电机固定连接滚轮,调节杆下部滑动穿过固定块、上部螺纹连接固定板,弹性装置套装在调节杆下部且下端与固定块接触、上端与调节杆中部接触。本楼梯扶手清理装置,结构
一种用于楼梯扶手清洁的机器人.pdf
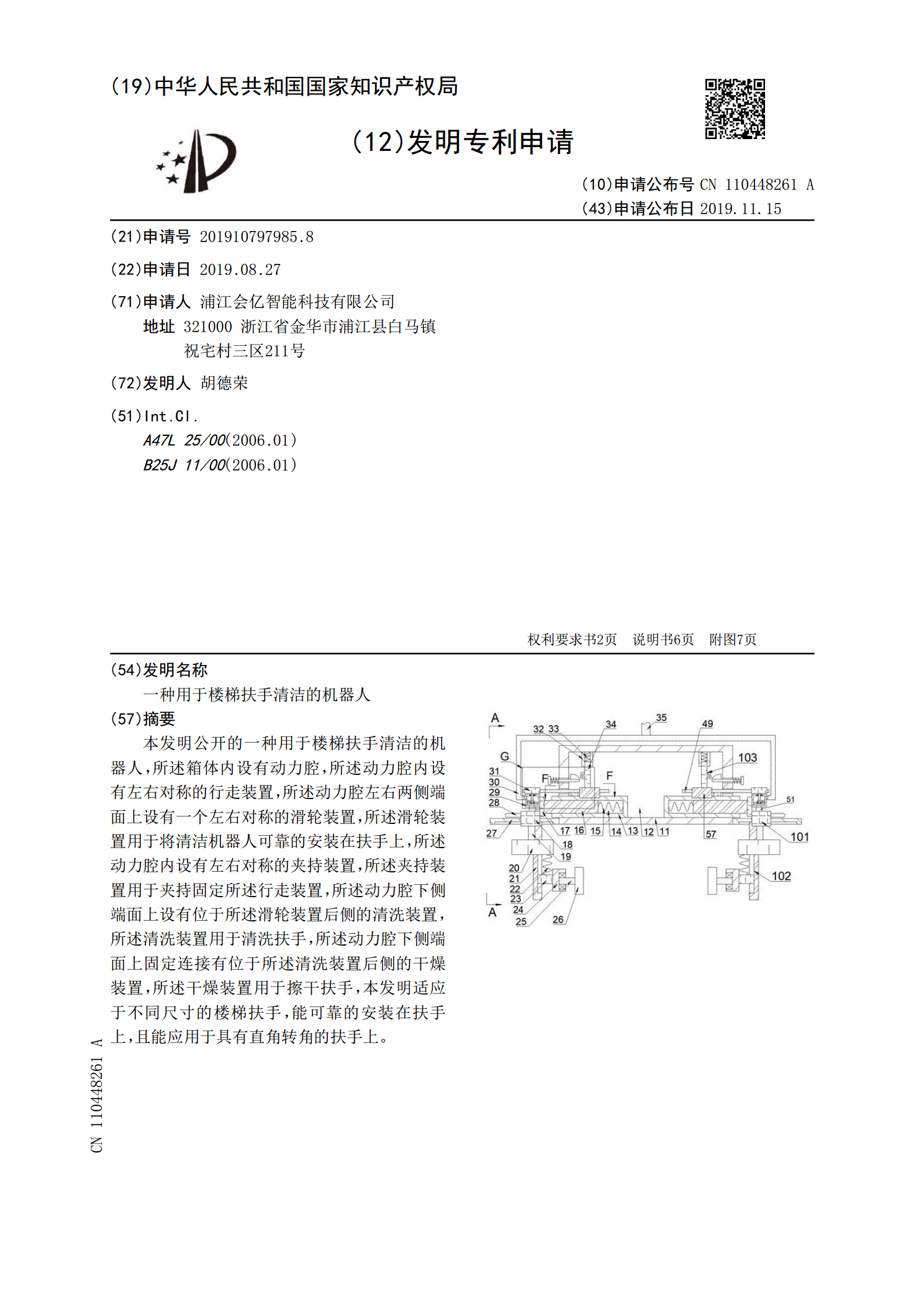
本发明公开的一种用于楼梯扶手清洁的机器人,所述箱体内设有动力腔,所述动力腔内设有左右对称的行走装置,所述动力腔左右两侧端面上设有一个左右对称的滑轮装置,所述滑轮装置用于将清洁机器人可靠的安装在扶手上,所述动力腔内设有左右对称的夹持装置,所述夹持装置用于夹持固定所述行走装置,所述动力腔下侧端面上设有位于所述滑轮装置后侧的清洗装置,所述清洗装置用于清洗扶手,所述动力腔下侧端面上固定连接有位于所述清洗装置后侧的干燥装置,所述干燥装置用于擦干扶手,本发明适应于不同尺寸的楼梯扶手,能可靠的安装在扶手上,且能应用于具
楼梯扶手清洁机器人.pdf
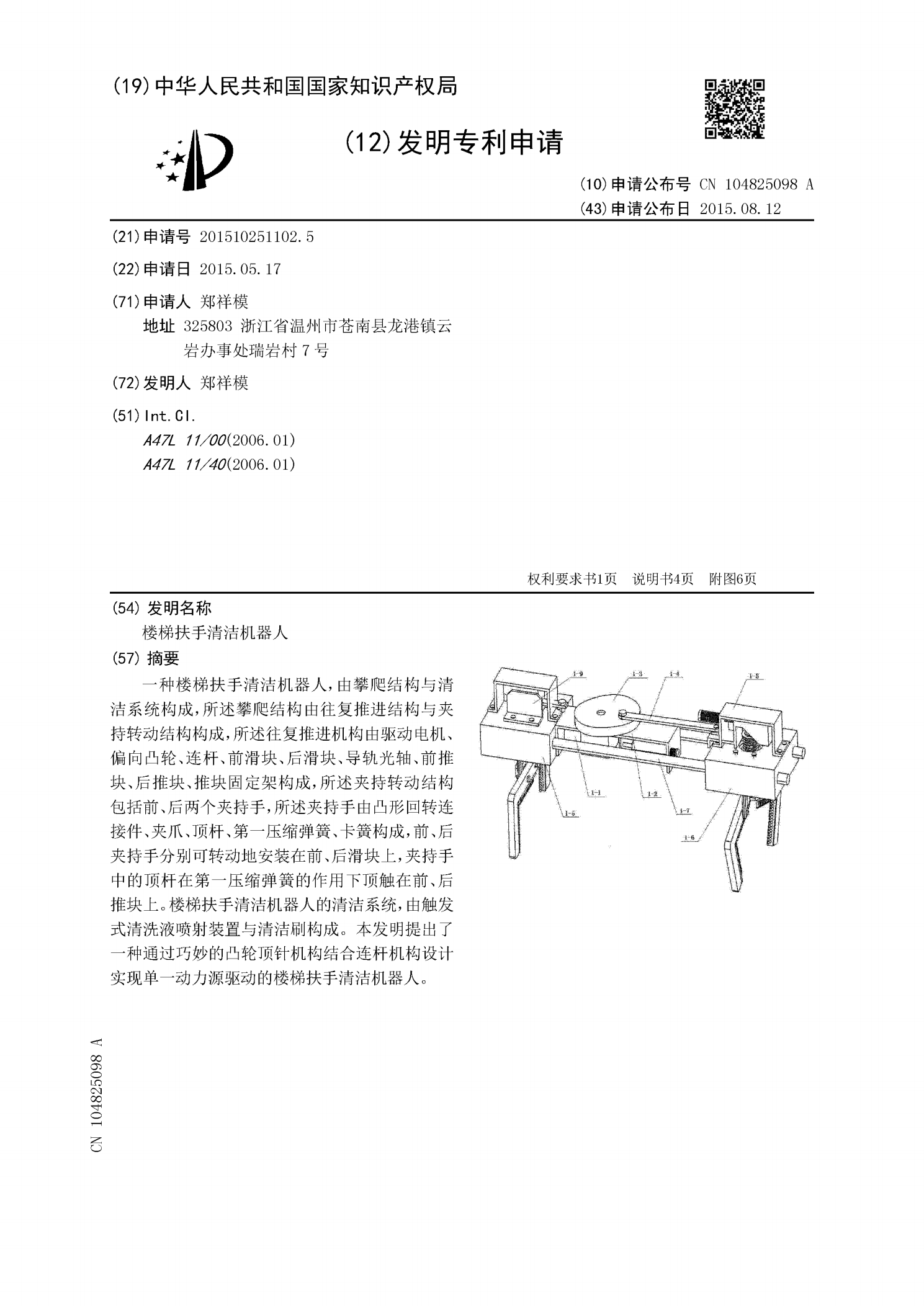
一种楼梯扶手清洁机器人,由攀爬结构与清洁系统构成,所述攀爬结构由往复推进结构与夹持转动结构构成,所述往复推进机构由驱动电机、偏向凸轮、连杆、前滑块、后滑块、导轨光轴、前推块、后推块、推块固定架构成,所述夹持转动结构包括前、后两个夹持手,所述夹持手由凸形回转连接件、夹爪、顶杆、第一压缩弹簧、卡簧构成,前、后夹持手分别可转动地安装在前、后滑块上,夹持手中的顶杆在第一压缩弹簧的作用下顶触在前、后推块上。楼梯扶手清洁机器人的清洁系统,由触发式清洗液喷射装置与清洁刷构成。本发明提出了一种通过巧妙的凸轮顶针机构结合连
一种新型猪舍清理机器人及其清理方法.pdf
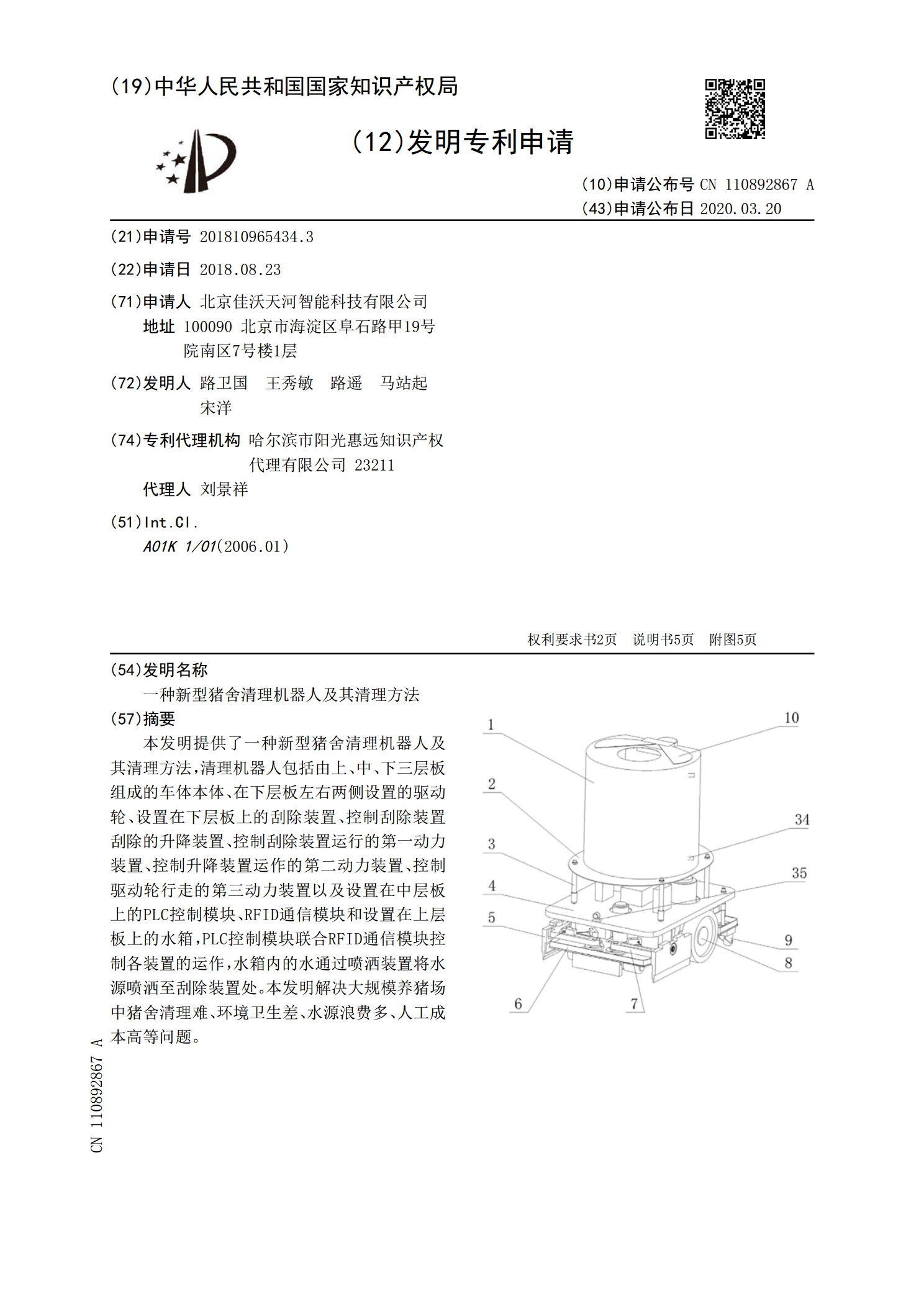
本发明提供了一种新型猪舍清理机器人及其清理方法,清理机器人包括由上、中、下三层板组成的车体本体、在下层板左右两侧设置的驱动轮、设置在下层板上的刮除装置、控制刮除装置刮除的升降装置、控制刮除装置运行的第一动力装置、控制升降装置运作的第二动力装置、控制驱动轮行走的第三动力装置以及设置在中层板上的PLC控制模块、RFID通信模块和设置在上层板上的水箱,PLC控制模块联合RFID通信模块控制各装置的运作,水箱内的水通过喷洒装置将水源喷洒至刮除装置处。本发明解决大规模养猪场中猪舍清理难、环境卫生差、水源浪费多、人工