
一种新型猪舍清理机器人及其清理方法.pdf

是你****韵呀


1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种新型猪舍清理机器人及其清理方法.pdf
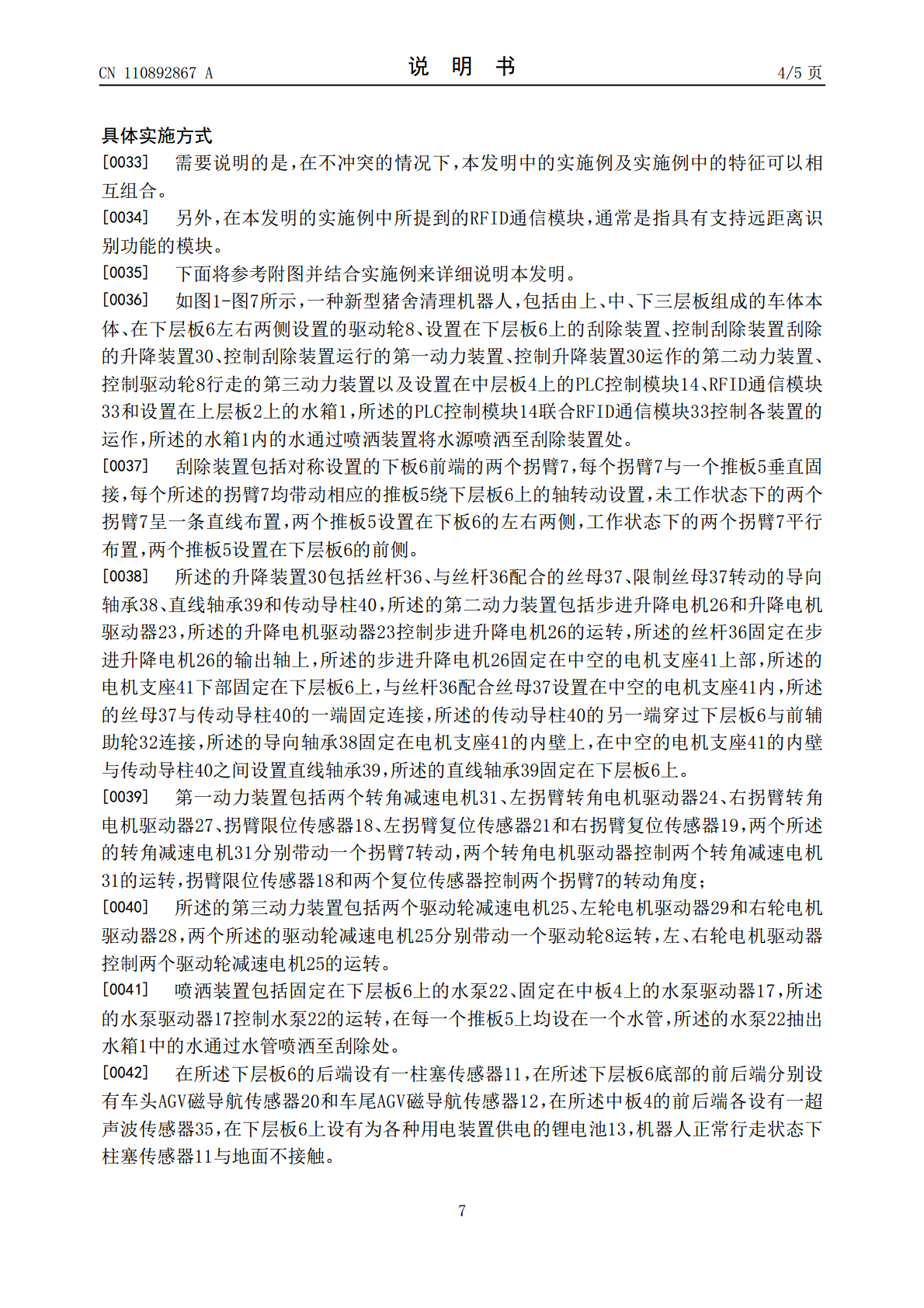
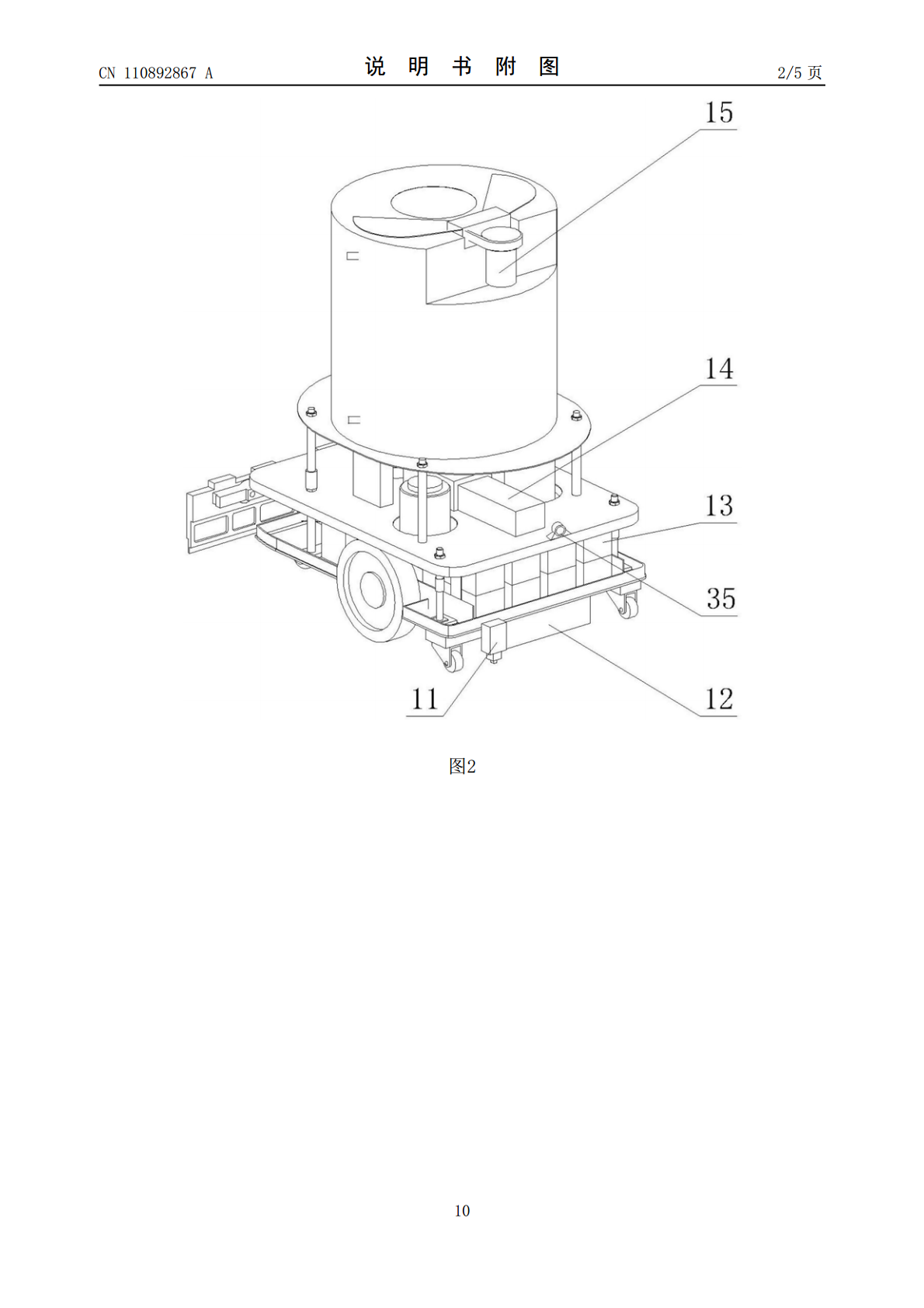
本发明提供了一种新型猪舍清理机器人及其清理方法,清理机器人包括由上、中、下三层板组成的车体本体、在下层板左右两侧设置的驱动轮、设置在下层板上的刮除装置、控制刮除装置刮除的升降装置、控制刮除装置运行的第一动力装置、控制升降装置运作的第二动力装置、控制驱动轮行走的第三动力装置以及设置在中层板上的PLC控制模块、RFID通信模块和设置在上层板上的水箱,PLC控制模块联合RFID通信模块控制各装置的运作,水箱内的水通过喷洒装置将水源喷洒至刮除装置处。本发明解决大规模养猪场中猪舍清理难、环境卫生差、水源浪费多、人工

猪舍用自动化智能清理机及其清理方法.pdf
本发明提供了一种猪舍用自动化智能清理机及其清理方法,清理机包括支撑行走系统、清扫系统、升降系统、储能系统和控制系统,支撑行走系统包括设置在车体底座左右两侧的行走轮、设置在车体底座底部前部的前辅助轮、设置在车体底座后端的两个后辅助轮和设置在车体底座上的直流减速电机,直流减速电机设置两个,均通过一个驱动轴带动各自侧的行走轮运动,前辅助轮和两个行走轮构成三点支撑车体底座,在清理机正常工作下的两个所述的后辅助轮与地面不接触,清扫系统包括对称设置在车体底座前部两个拐臂,每个拐臂通过一挂轴与一个推板垂直转动连接。本发
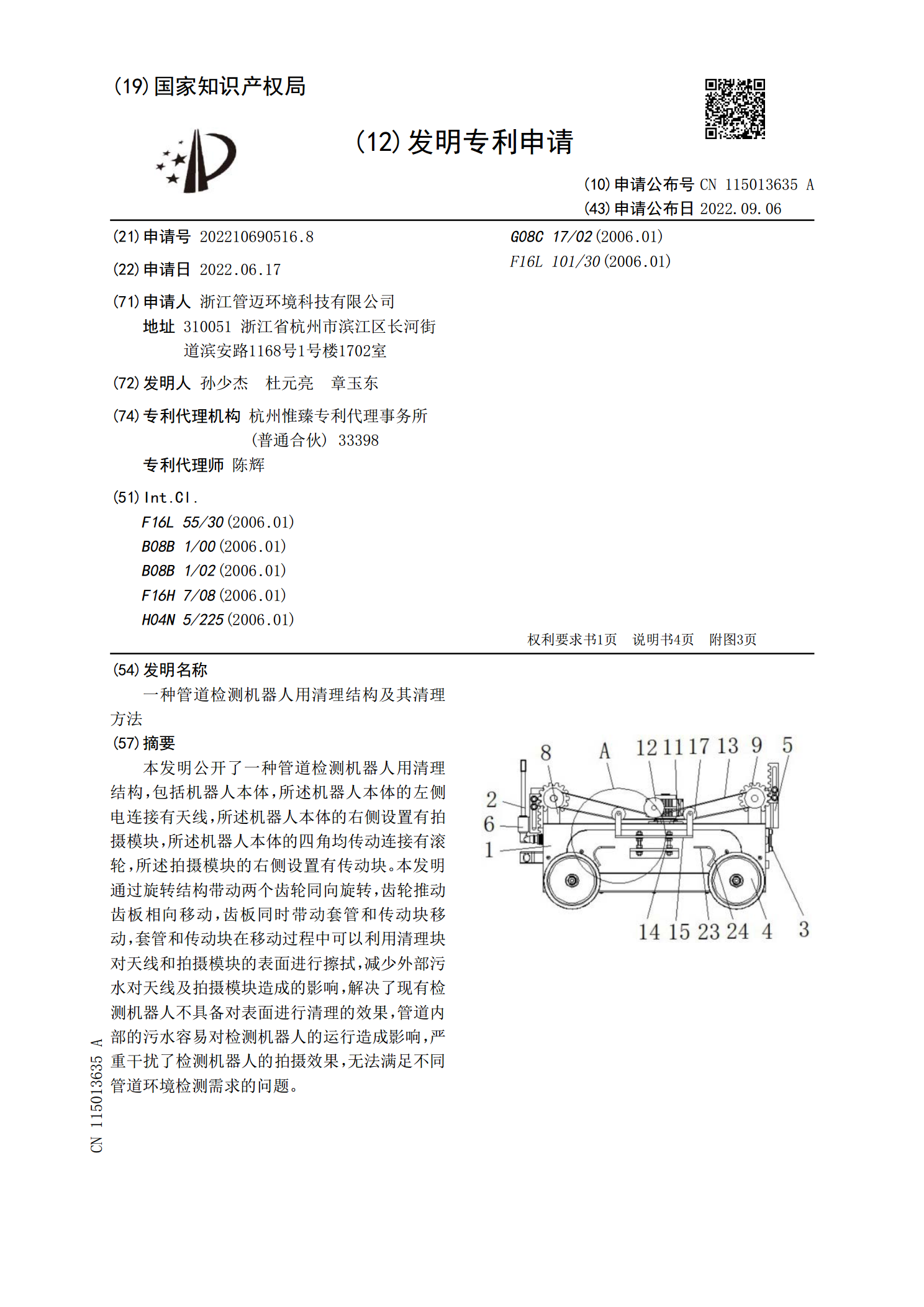
一种管道检测机器人用清理结构及其清理方法.pdf
本发明公开了一种管道检测机器人用清理结构,包括机器人本体,所述机器人本体的左侧电连接有天线,所述机器人本体的右侧设置有拍摄模块,所述机器人本体的四角均传动连接有滚轮,所述拍摄模块的右侧设置有传动块。本发明通过旋转结构带动两个齿轮同向旋转,齿轮推动齿板相向移动,齿板同时带动套管和传动块移动,套管和传动块在移动过程中可以利用清理块对天线和拍摄模块的表面进行擦拭,减少外部污水对天线及拍摄模块造成的影响,解决了现有检测机器人不具备对表面进行清理的效果,管道内部的污水容易对检测机器人的运行造成影响,严重干扰了检测机

一种封闭环境内清理机器人及其清理方法.pdf
本发明公开了一种封闭环境内清理机器人及其清理方法,属于输送管道清理设备技术领域。本发明包括主箱体及其底面的行走机构,还包括清理机构和遥控信号接收器;所述行走机构包括主箱体的底箱壁上固定设置的行走动力机构和主箱体两底侧面对称设置的车轮;所述行走动力机构和车轮传动式连接;所述清理机构包括在主箱体端面设置的刮板、和刮板固定连接的升降机构以及在主箱体内固定安装的升降动力机构;所述升降动力机构通过动力输出轴和升降机构传动式连接;所述遥控信号接收器固定于主箱体的顶部,通过无线和遥控器连接,接收遥控信号并通过控制器控制
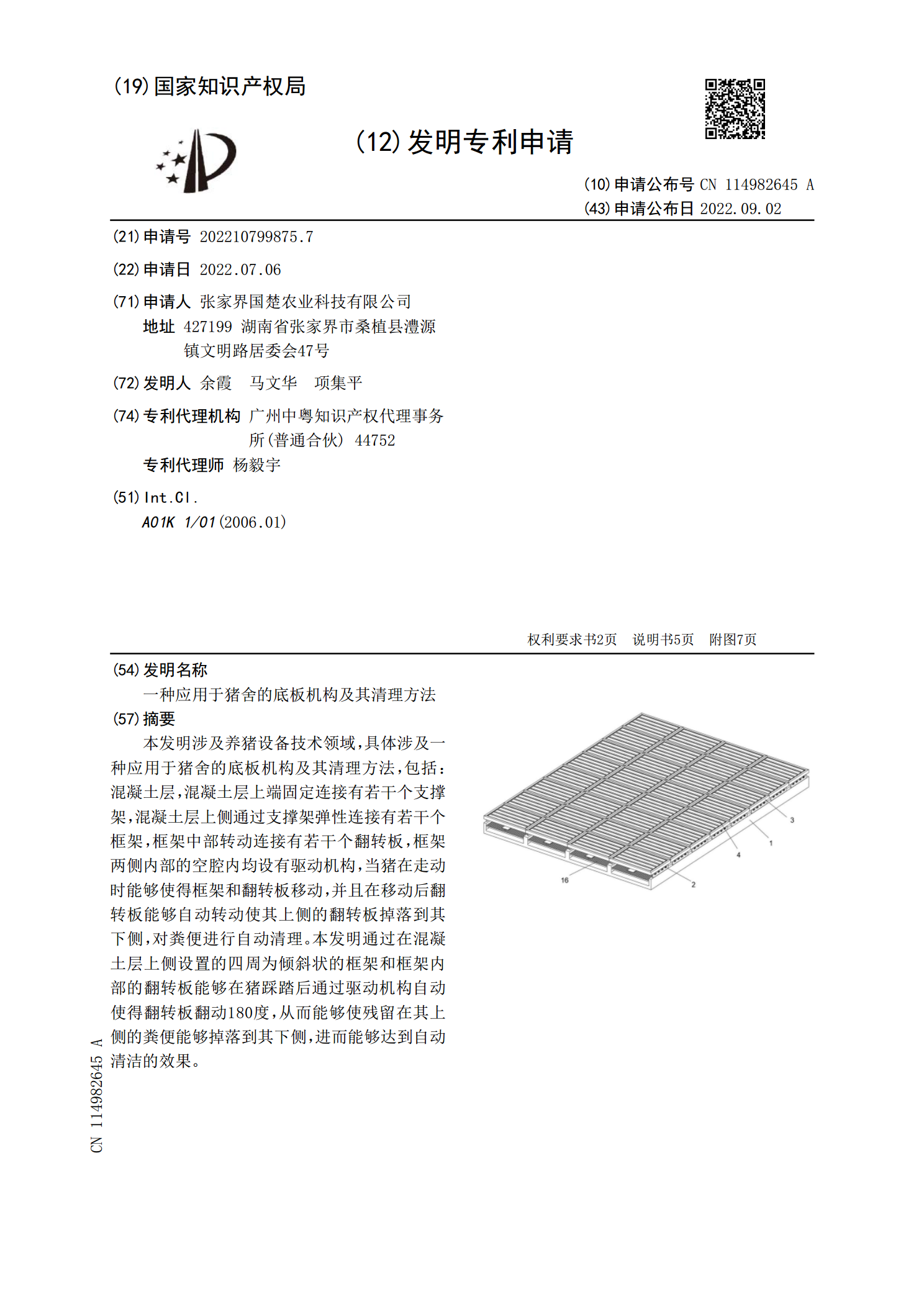
一种应用于猪舍的底板机构及其清理方法.pdf
本发明涉及养猪设备技术领域,具体涉及一种应用于猪舍的底板机构及其清理方法,包括:混凝土层,混凝土层上端固定连接有若干个支撑架,混凝土层上侧通过支撑架弹性连接有若干个框架,框架中部转动连接有若干个翻转板,框架两侧内部的空腔内均设有驱动机构,当猪在走动时能够使得框架和翻转板移动,并且在移动后翻转板能够自动转动使其上侧的翻转板掉落到其下侧,对粪便进行自动清理。本发明通过在混凝土层上侧设置的四周为倾斜状的框架和框架内部的翻转板能够在猪踩踏后通过驱动机构自动使得翻转板翻动180度,从而能够使残留在其上侧的粪便能够掉