
海冰区域轮廓线检测方法及装置.pdf

Th****84

1/10
2/10
3/10
4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

海冰区域轮廓线检测方法及装置.pdf
本发明实施例提供一种海冰区域轮廓线检测方法及装置,该方法包括:在海面上沿目标方向发射脉冲后,接收与脉冲对应的脉冲回波序列;脉冲回波序列包括一系列采样点及每个采样点的回波幅度;选取采样点中回波幅度的空间均匀性剧烈变化的目标采样点,并将目标采样点作为海冰区域的对应于目标方向的轮廓点;通过连接对应于不同的目标方向的轮廓点,获得海冰区域的轮廓线。本发明实施例提供通过选取采样点中的目标采样点,利用位于海水区域与海冰区域之间交界区域的采样点对应的回波幅度会出现明显的空间均匀性剧烈变化的特点,获得海冰区域的轮廓线,能够
蜂窝的轮廓线夹角顶点提取方法、检测方法及装置.pdf
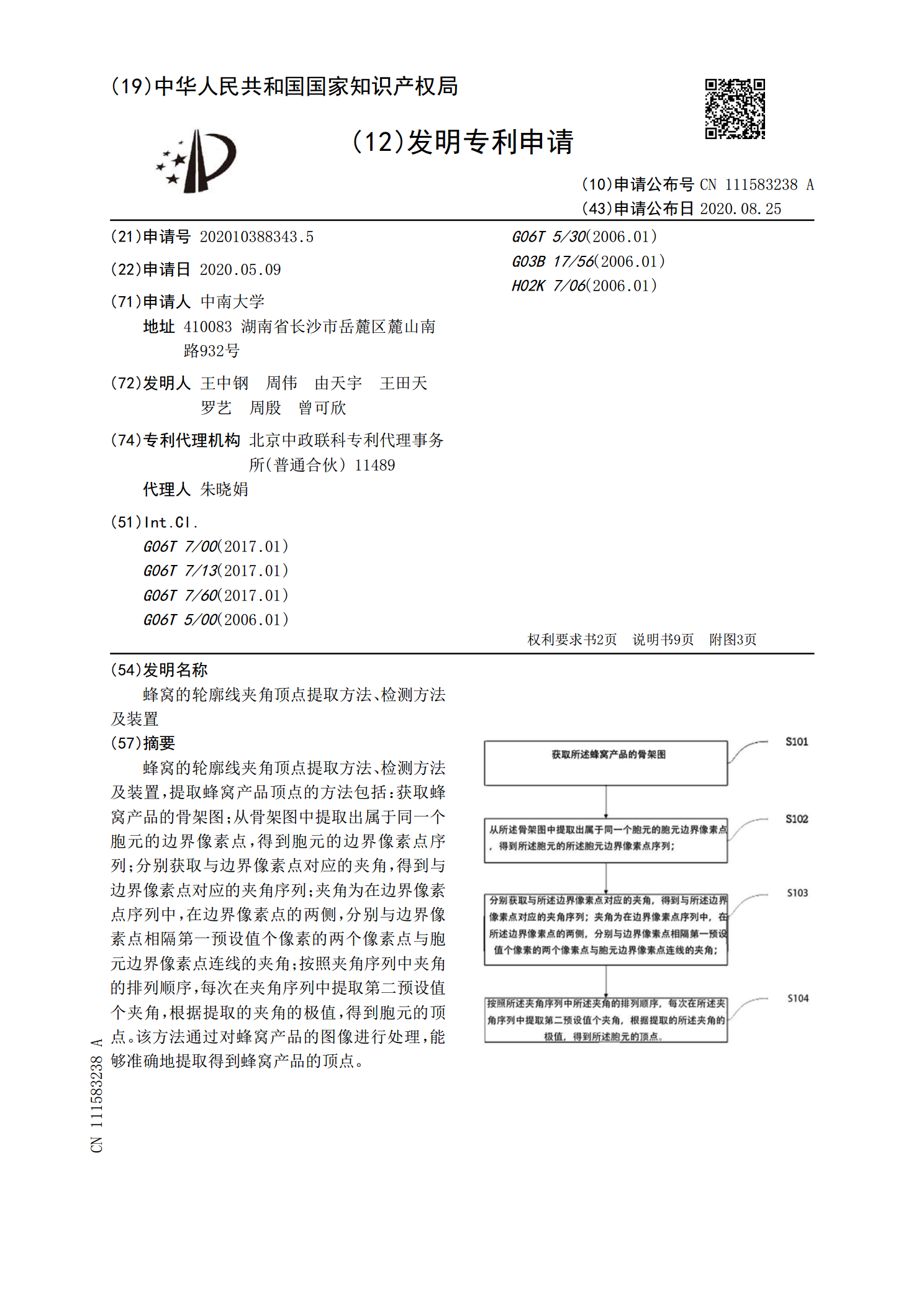
蜂窝的轮廓线夹角顶点提取方法、检测方法及装置,提取蜂窝产品顶点的方法包括:获取蜂窝产品的骨架图;从骨架图中提取出属于同一个胞元的边界像素点,得到胞元的边界像素点序列;分别获取与边界像素点对应的夹角,得到与边界像素点对应的夹角序列;夹角为在边界像素点序列中,在边界像素点的两侧,分别与边界像素点相隔第一预设值个像素的两个像素点与胞元边界像素点连线的夹角;按照夹角序列中夹角的排列顺序,每次在夹角序列中提取第二预设值个夹角,根据提取的夹角的极值,得到胞元的顶点。该方法通过对蜂窝产品的图像进行处理,能够准确地提取得

工件表面轮廓线获取方法、干涉检测方法和相关装置.pdf
本发明公开了一种工件表面轮廓线获取方法和一种机器人干涉检测方法,通过驱动机器人本体沿着已编辑好的示教轨迹运行,计算机器人末端执行器在工件表面形成的运行轨迹,作为工件的表面轨迹,对表面轨迹进行数据处理,将其近似为工件表面轮廓线,然后根据获得的工件表面轮廓线进行机器人干涉检测,通过在仿真环境中,驱动机器人本体沿着示教轨迹逐点运行,检测机器人与工件表面轮廓线之间是否相交,将相交的轨迹点作为干涉点进行记录并保存。在无需工件三维模型的前提下,即可自动检测出机器人是否与工件发生干涉或碰撞,以及在何处发生干涉,能够降低

获取图像轮廓线的方法及装置.pdf
一种获取图像轮廓线的方法,包括:获取图像,计算所述图像的梯度信息;根据所述梯度信息计算所述图像的结构特征;计算所述结构特征的特征向量;提取所述特征向量的垂直分量,并根据所述特征向量的垂直分量提取所述图像的边缘像素点;根据所述边缘像素点生成轮廓线。此外,还提供了一种获取图像轮廓线的装置。上述获取图像轮廓线的方法和装置可以提高准确度。

凸轮廓线检测与模拟加工实验装置.pdf
本发明属于机械领域的实验装置,具体是一种凸轮廓线检测与模拟加工实验装置,其可以对凸轮的运动廓线进行检测,同时也可以模拟加工凸轮。凸轮廓线检测与模拟加工实验装置,包括机柜、测轮廓机构、被测凸轮安装机构以及模拟加工实验机构,测轮廓机构包括直线位移传感器、圆柱凸轮测廓杆以及盘形凸轮测廓杆,被测凸轮安装机构包括安装于机柜上并与转动动力相连接的用来安装被测凸轮的凸轮轴;模拟加工机构包括立式铣形式的铣刀部件和工作台部件,所述的工作台部件包括可产生三轴移动和一轴转动的驱动机构以及其上安装的工作台。本发明的有