
一种可升降的夹具机器人.pdf

努力****星驰


1/7
2/7
3/7
4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可升降的夹具机器人.pdf
本发明公开了一种可升降的夹具机器人,包括夹具机器人、齿轮箱、第一夹块和第二夹块,所述夹具机器人的底部设有液压杆,且所述液压杆与夹具机器人固定连接,所述液压杆的顶部设有力臂,且所述力臂与液压杆通过连接轴固定连接,所述力臂的一侧设有横臂,且所述横臂与力臂固定连接,所述横臂的顶部设有电机箱,且所述电机箱嵌入设置在横臂中,并与横杆固定连接,所述电机箱的一侧设有数据传输接口,且所述数据传输接口嵌入设置在电机箱中;该种可升降的夹具机器人,利用液压杆进行夹具机器人的升降运动,能够对高低不同的物品进行夹起运动,非常实用。
一种可升降的机器人焊装夹具.pdf
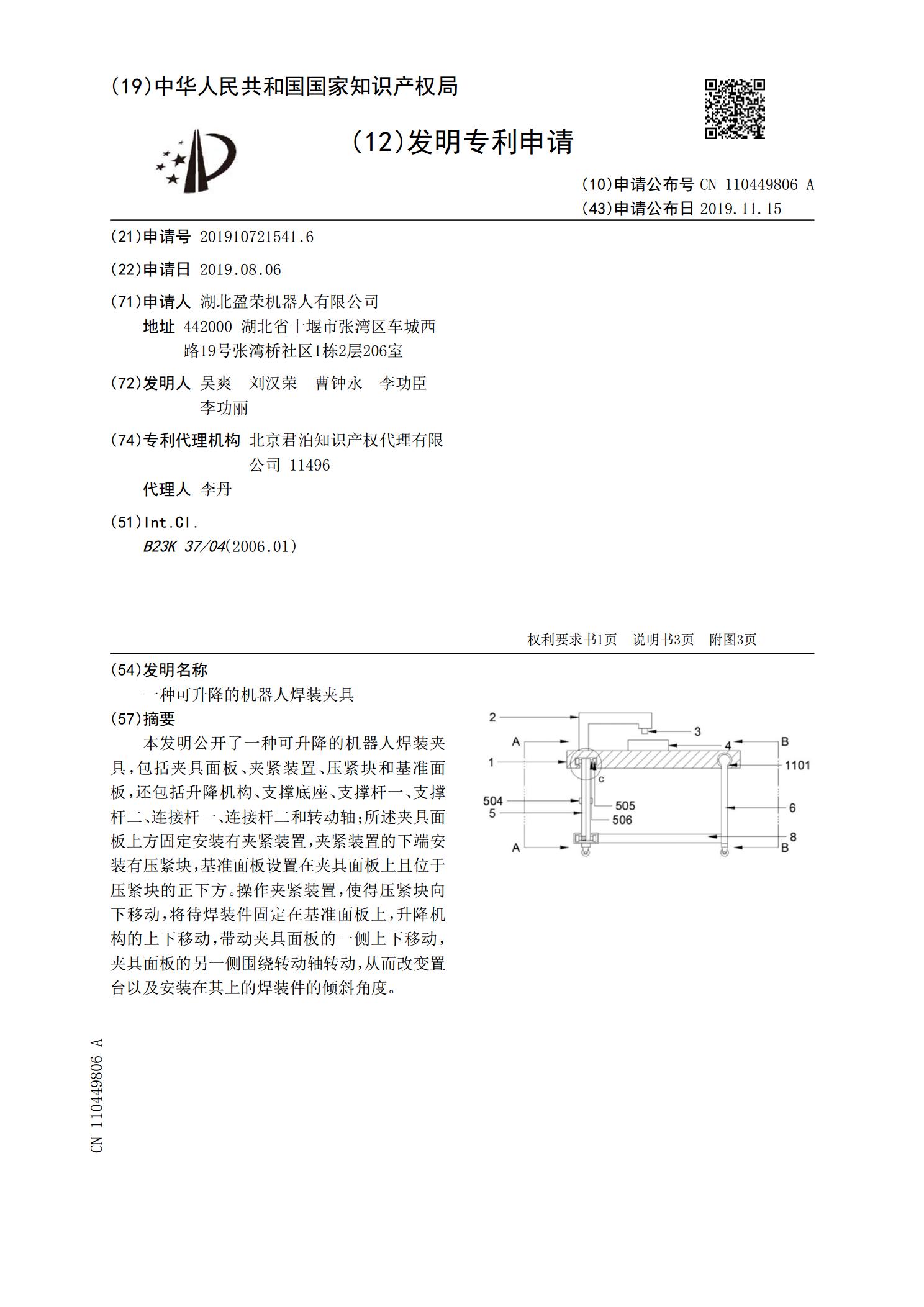
本发明公开了一种可升降的机器人焊装夹具,包括夹具面板、夹紧装置、压紧块和基准面板,还包括升降机构、支撑底座、支撑杆一、支撑杆二、连接杆一、连接杆二和转动轴;所述夹具面板上方固定安装有夹紧装置,夹紧装置的下端安装有压紧块,基准面板设置在夹具面板上且位于压紧块的正下方。操作夹紧装置,使得压紧块向下移动,将待焊装件固定在基准面板上,升降机构的上下移动,带动夹具面板的一侧上下移动,夹具面板的另一侧围绕转动轴转动,从而改变置台以及安装在其上的焊装件的倾斜角度。
一种可升降旋转夹具.pdf
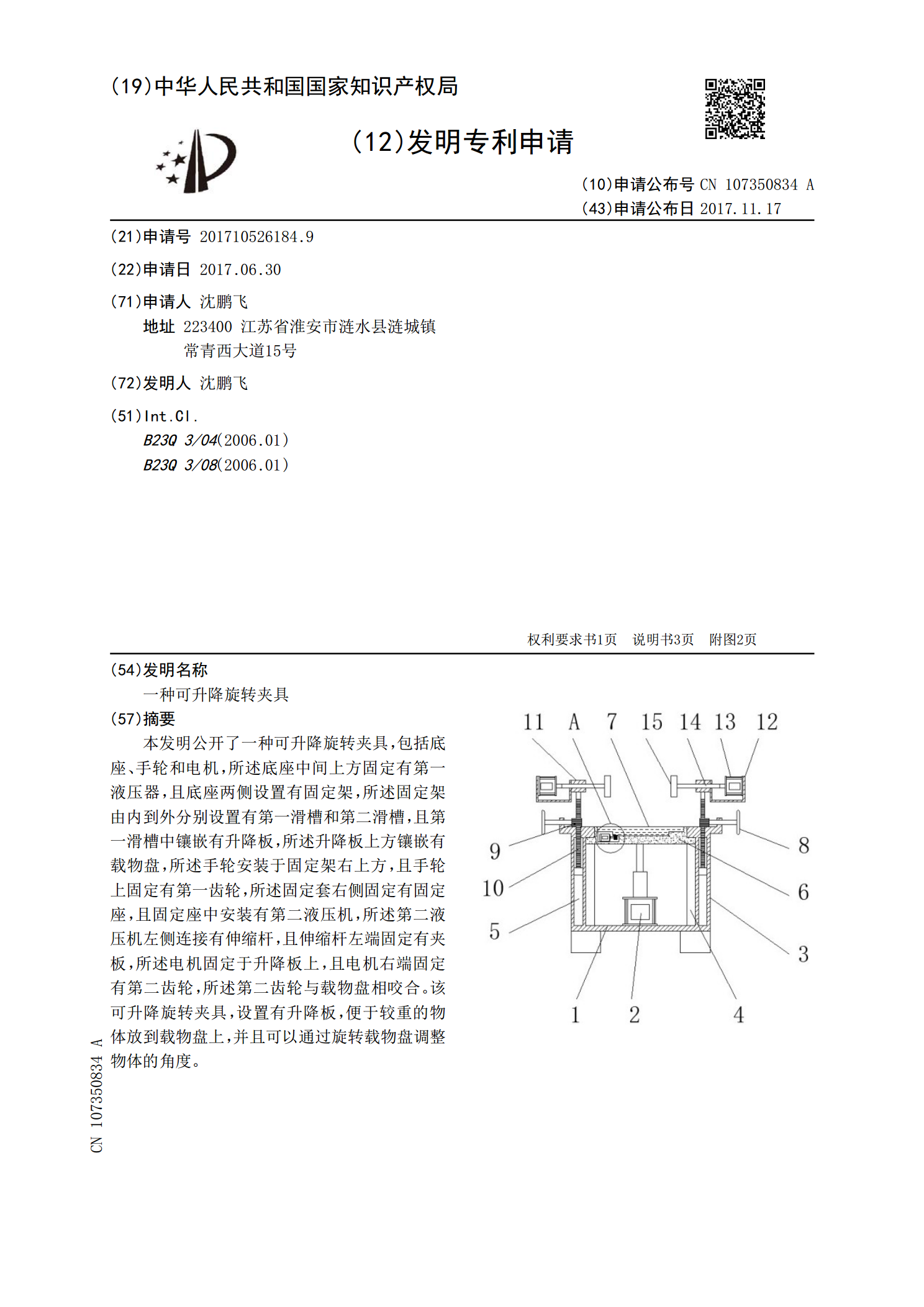
本发明公开了一种可升降旋转夹具,包括底座、手轮和电机,所述底座中间上方固定有第一液压器,且底座两侧设置有固定架,所述固定架由内到外分别设置有第一滑槽和第二滑槽,且第一滑槽中镶嵌有升降板,所述升降板上方镶嵌有载物盘,所述手轮安装于固定架右上方,且手轮上固定有第一齿轮,所述固定套右侧固定有固定座,且固定座中安装有第二液压机,所述第二液压机左侧连接有伸缩杆,且伸缩杆左端固定有夹板,所述电机固定于升降板上,且电机右端固定有第二齿轮,所述第二齿轮与载物盘相咬合。该可升降旋转夹具,设置有升降板,便于较重的物体放到载物

一种夹紧机构可升降的夹具.pdf
一种夹紧机构可升降的夹具,包括夹具体1、钻套架3、定位钻套4和升降装置5。退料杆(26)位于夹管(23)中;夹管(23)位于升降体(9)中,并使夹管(23)的外锥面与升降体(9)的内锥孔相配合;在夹管(23)的一端套装有夹管弹簧(34);提升导柱(29)的一段套装在升降体(9)上;升降体(9)和提升导柱(29)一并装入夹具体(1)中;装有偏心凸轮(14)的凸轮轴(10)位于夹具体(1)一端的内孔中;钻套架(3)安装在夹具体(1)上;夹管螺母(24)套装在升降体(9)一端。本发明使加工前工艺系统的调整简单化
一种带夹具的可升降机床.pdf
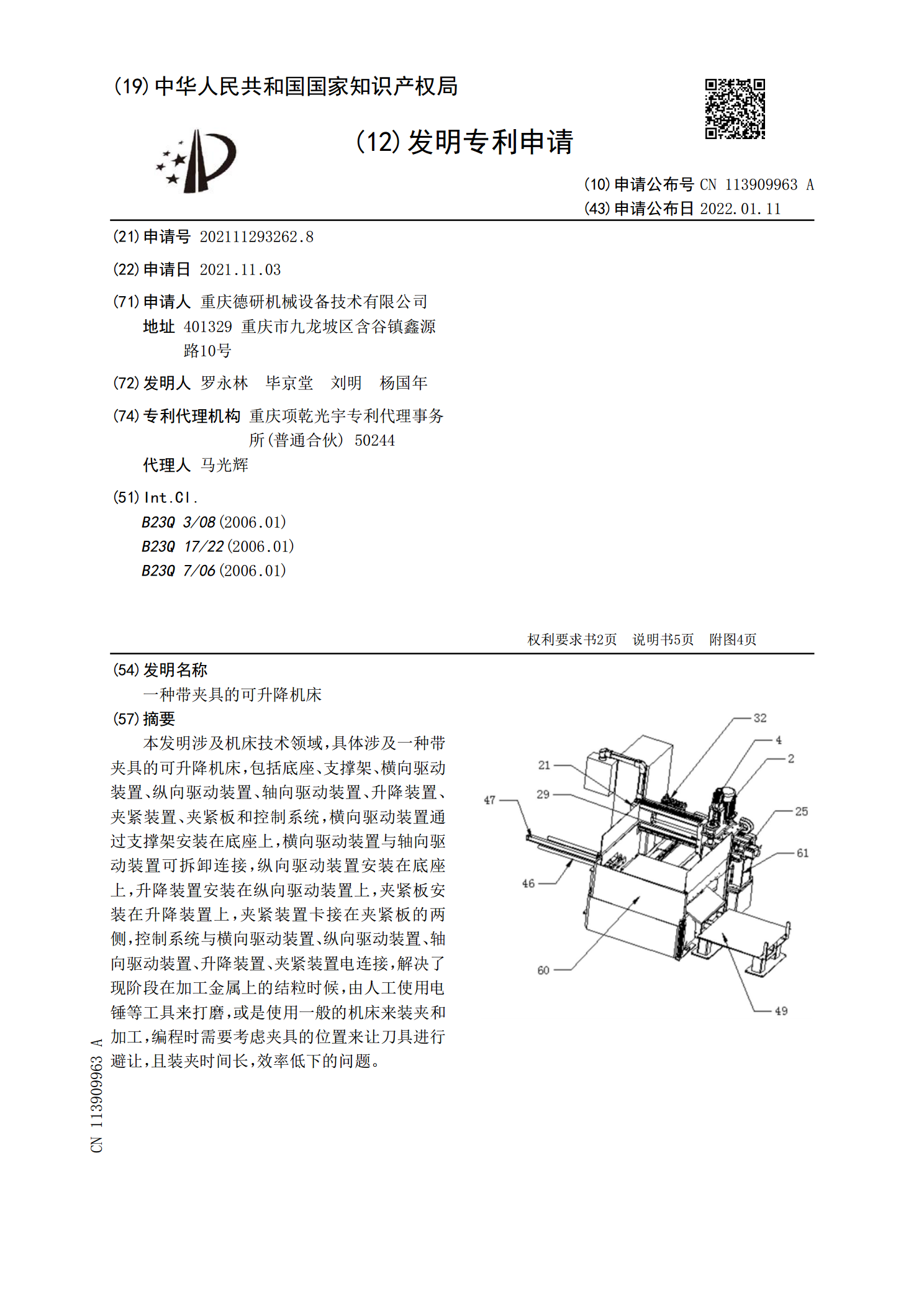
本发明涉及机床技术领域,具体涉及一种带夹具的可升降机床,包括底座、支撑架、横向驱动装置、纵向驱动装置、轴向驱动装置、升降装置、夹紧装置、夹紧板和控制系统,横向驱动装置通过支撑架安装在底座上,横向驱动装置与轴向驱动装置可拆卸连接,纵向驱动装置安装在底座上,升降装置安装在纵向驱动装置上,夹紧板安装在升降装置上,夹紧装置卡接在夹紧板的两侧,控制系统与横向驱动装置、纵向驱动装置、轴向驱动装置、升降装置、夹紧装置电连接,解决了现阶段在加工金属上的结粒时候,由人工使用电锤等工具来打磨,或是使用一般的机床来装夹和加工,