
一种基于LabVIEW的电动直线舵机控制系统及方法.pdf

长春****主a


1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于LabVIEW的电动直线舵机控制系统及方法.pdf
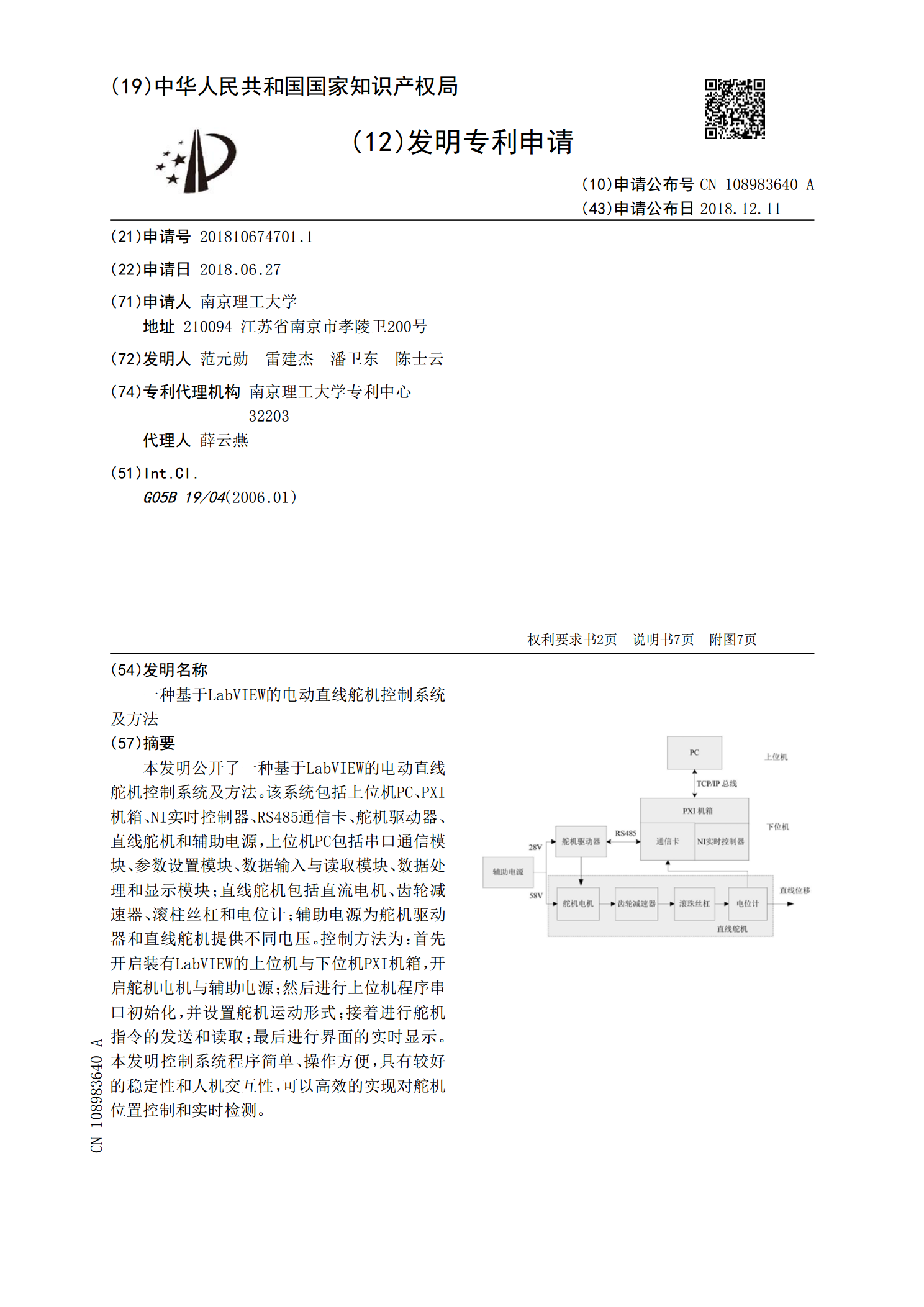
本发明公开了一种基于LabVIEW的电动直线舵机控制系统及方法。该系统包括上位机PC、PXI机箱、NI实时控制器、RS485通信卡、舵机驱动器、直线舵机和辅助电源,上位机PC包括串口通信模块、参数设置模块、数据输入与读取模块、数据处理和显示模块;直线舵机包括直流电机、齿轮减速器、滚柱丝杠和电位计;辅助电源为舵机驱动器和直线舵机提供不同电压。控制方法为:首先开启装有LabVIEW的上位机与下位机PXI机箱,开启舵机电机与辅助电源;然后进行上位机程序串口初始化,并设置舵机运动形式;接着进行舵机指令的发送和读取

基于ARDC控制方法的电动舵机控制系统.docx
基于ARDC控制方法的电动舵机控制系统电动舵机控制系统能够实现航空、水上交通工具、火车等各种交通运输工具的自动化控制。在航空领域中,电动舵机控制系统更是扮演着关键的角色。随着科技的不断进步,航空工业对于电动舵机控制系统的要求也越来越高,ARDC控制方法已经成为目前主要应用于电动舵机控制系统的一种方法。ARDC控制方法是一种基于现代控制理论的自适应鲁棒动态控制方法。该方法不仅具有较高的控制精度和鲁棒性,而且能够对机械故障等不确定性因素进行快速修正,提升电动舵机的控制性能。电动舵机控制系统由电动舵机、控制器、

基于DSP的电动舵机控制系统的设计.docx
基于DSP的电动舵机控制系统的设计随着现代技术的发展,越来越多的船舶采用电动舵机来取代传统的液压舵机,因为电动舵机具有体积小、重量轻、维护成本低等优点。然而,电动舵机的控制系统对于船舶的安全运行至关重要。因此,本文将基于DSP技术,对电动舵机控制系统进行设计与分析。一、DSP技术介绍DSP技术是数字信号处理技术的一种,它结合了数字信号处理与模拟信号处理的优点。DSP芯片具有高速、高效、低功耗、集成度高等优点,在现代控制系统中得到了广泛应用。二、电动舵机控制系统的设计电动舵机控制系统主要由控制器、驱动器和执

一种双冗余电动舵机控制系统及方法.pdf
本发明一种双冗余电动舵机控制系统,包括用于分别对控制舵机的差动周转轮系减速机进行动力输入的第一、二电机,用于采集舵机运动状态的第一位置传感器和第二位置传感器;用于分别接受第一、二位置传感器信号的第一、二数字控制单元;第一、二电机上分别设置第一、二制动器,第一、二制动器分别与第一、二数字控制单元的输出端连接;第一、二数字控制单元分别通过第一、二逆变器向第一、二电机发送控制信号;第一、二逆变器上分别设置第一、二桥路电流传感器,用于向第一、二数字控制单元传输桥路电流采样信号;第一、二数字控制单元分别通过引出CA
一种微型电动直线驱动伺服舵机.pdf
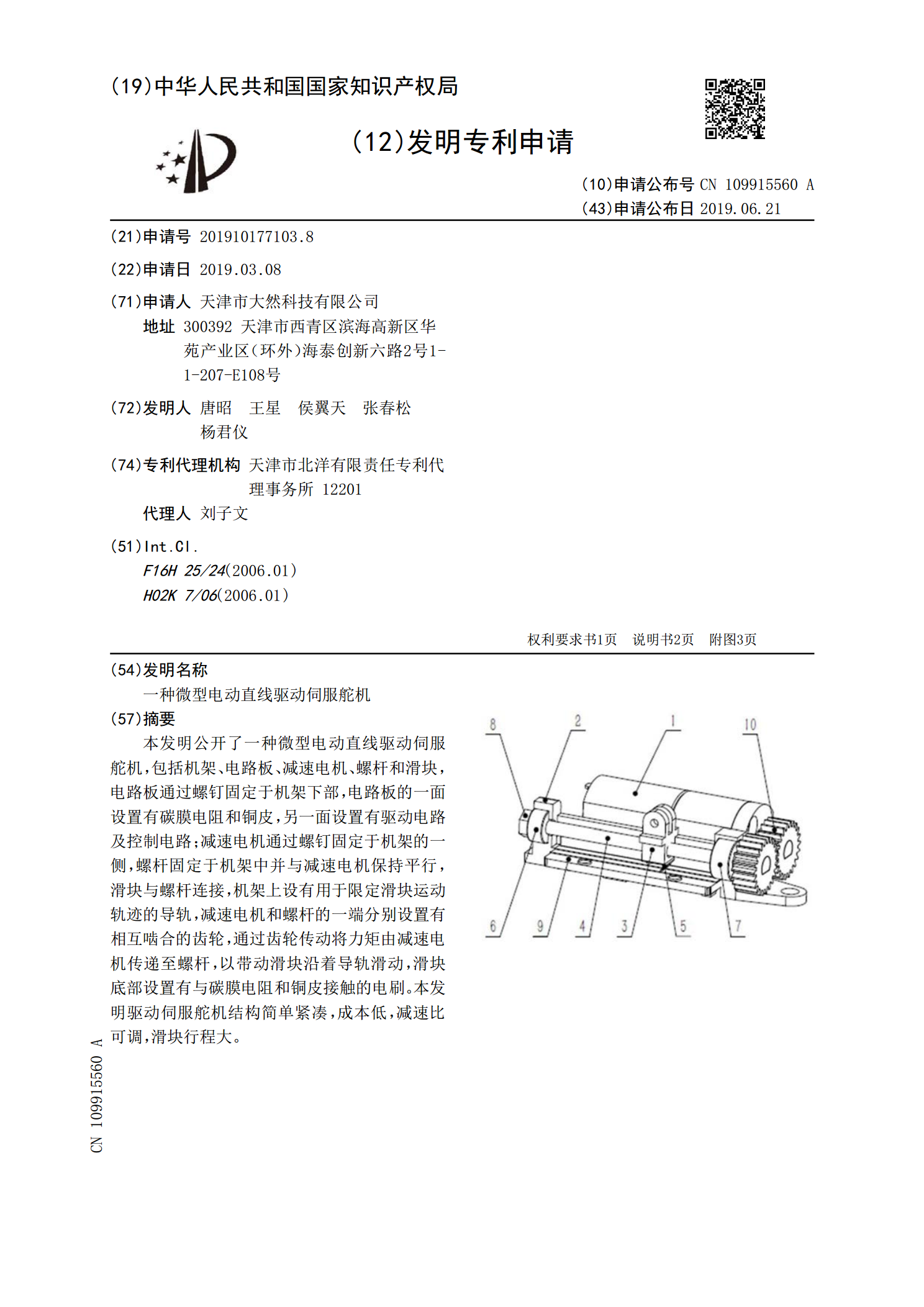
本发明公开了一种微型电动直线驱动伺服舵机,包括机架、电路板、减速电机、螺杆和滑块,电路板通过螺钉固定于机架下部,电路板的一面设置有碳膜电阻和铜皮,另一面设置有驱动电路及控制电路;减速电机通过螺钉固定于机架的一侧,螺杆固定于机架中并与减速电机保持平行,滑块与螺杆连接,机架上设有用于限定滑块运动轨迹的导轨,减速电机和螺杆的一端分别设置有相互啮合的齿轮,通过齿轮传动将力矩由减速电机传递至螺杆,以带动滑块沿着导轨滑动,滑块底部设置有与碳膜电阻和铜皮接触的电刷。本发明驱动伺服舵机结构简单紧凑,成本低,减速比可调,滑