
车辆及其行驶控制系统.pdf

猫巷****熙柔

1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆及其行驶控制系统.pdf
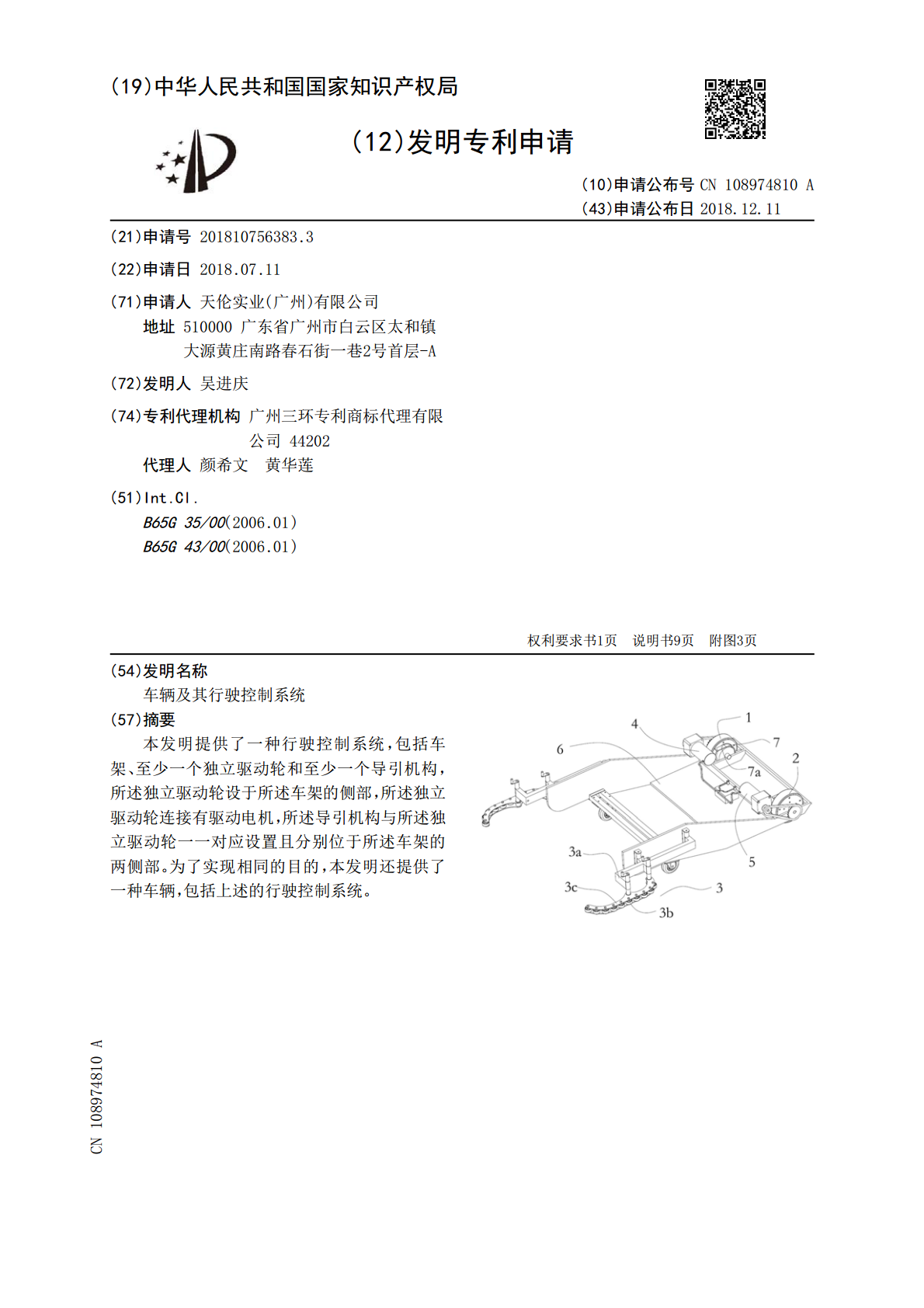
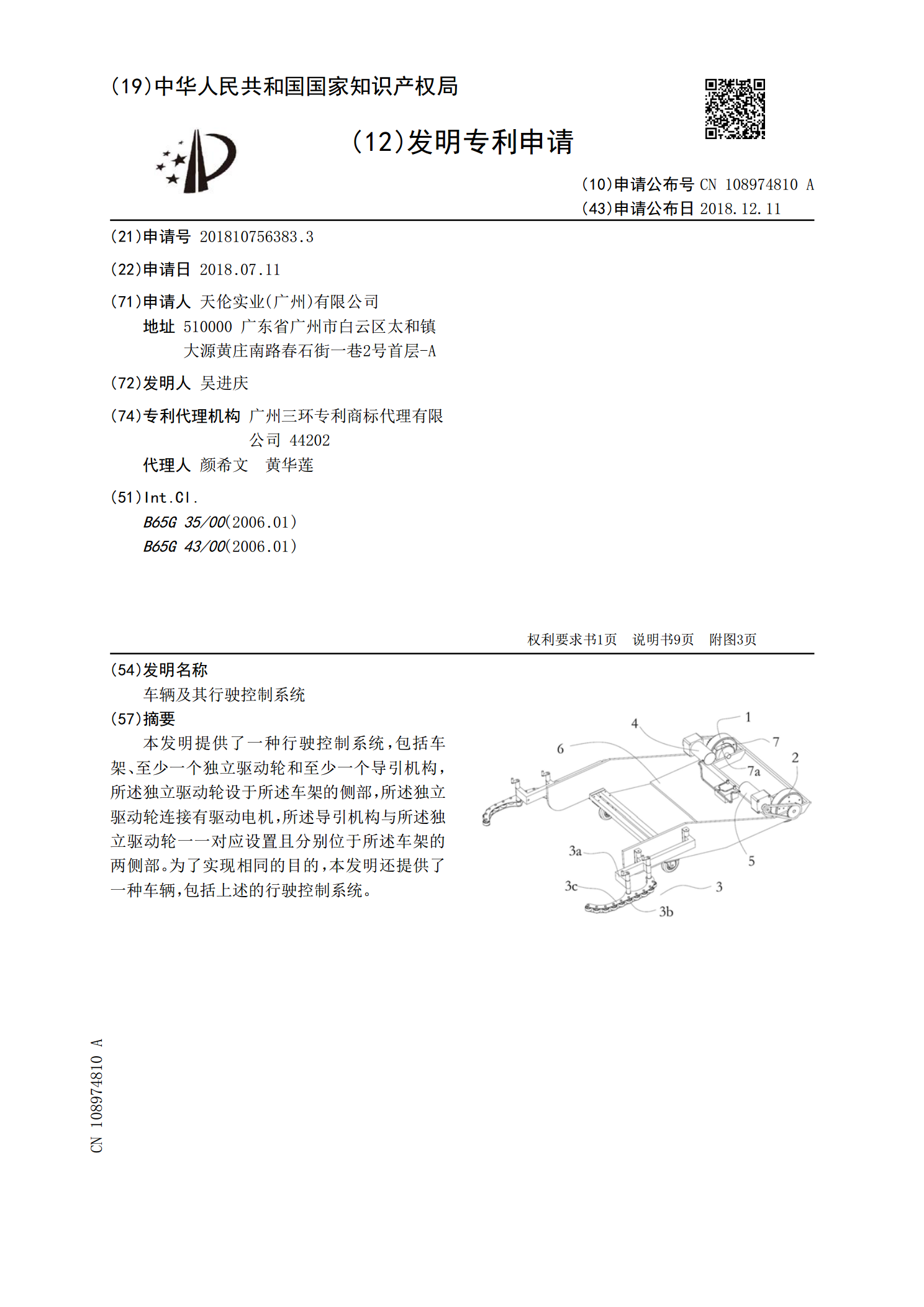
本发明提供了一种行驶控制系统,包括车架、至少一个独立驱动轮和至少一个导引机构,所述独立驱动轮设于所述车架的侧部,所述独立驱动轮连接有驱动电机,所述导引机构与所述独立驱动轮一一对应设置且分别位于所述车架的两侧部。为了实现相同的目的,本发明还提供了一种车辆,包括上述的行驶控制系统。
一种车辆及其行驶控制系统.pdf
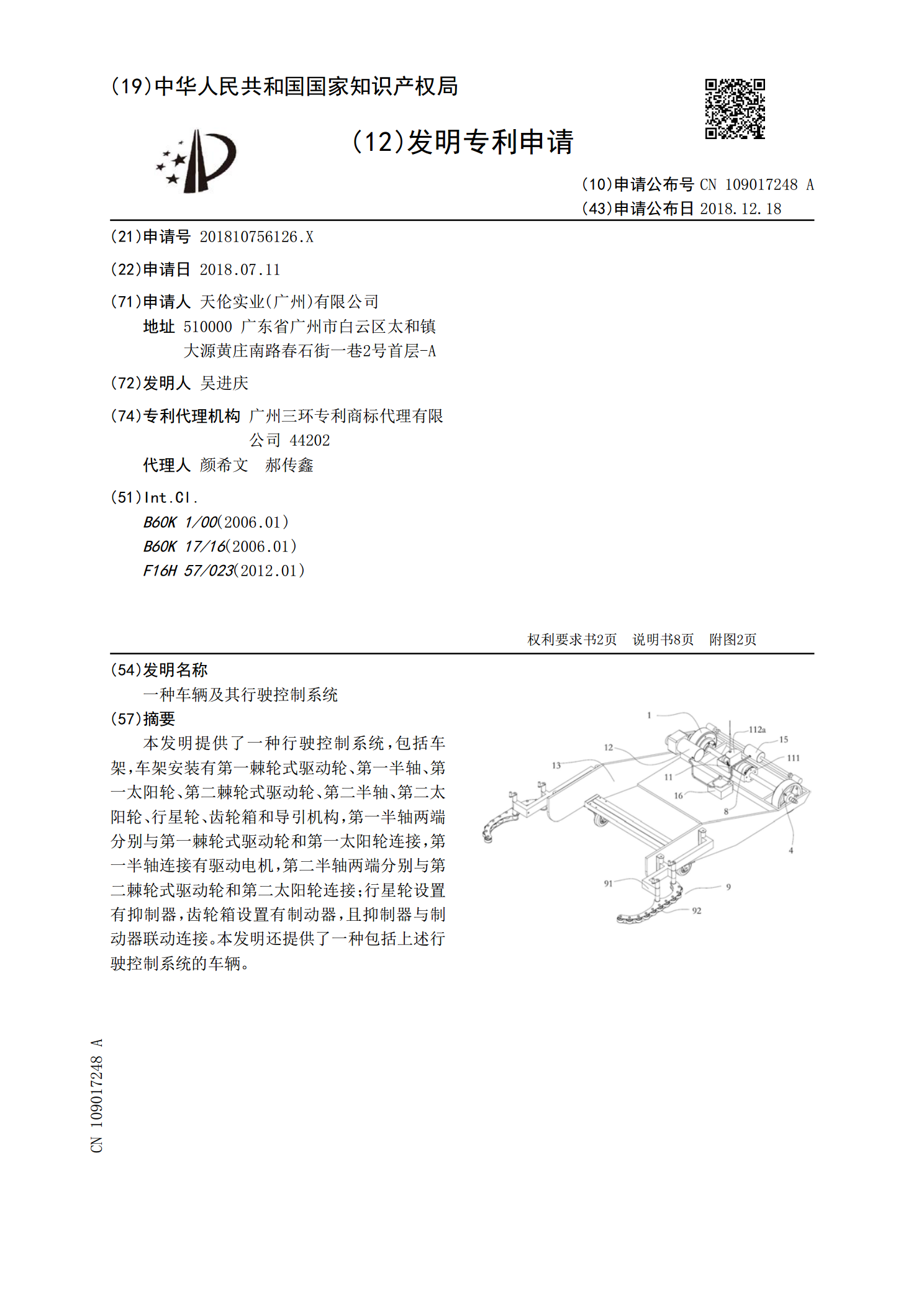
本发明提供了一种行驶控制系统,包括车架,车架安装有第一棘轮式驱动轮、第一半轴、第一太阳轮、第二棘轮式驱动轮、第二半轴、第二太阳轮、行星轮、齿轮箱和导引机构,第一半轴两端分别与第一棘轮式驱动轮和第一太阳轮连接,第一半轴连接有驱动电机,第二半轴两端分别与第二棘轮式驱动轮和第二太阳轮连接;行星轮设置有抑制器,齿轮箱设置有制动器,且抑制器与制动器联动连接。本发明还提供了一种包括上述行驶控制系统的车辆。

车辆行驶的控制系统及方法.pdf
本发明适用于车辆控制技术领域,提供了一种车辆行驶的控制系统及方法,包括:车辆预行驶状态采集单元,用于采集车辆预行驶状态信息和/或驾驶员状态信息;车辆运行工况采集单元,用于采集车辆运行工况信息;控制单元,用于根据接收到的所述车辆预行驶状态信息和/或所述驾驶员状态信息以及所述车辆运行工况信息,确定车辆的驾驶行为;处理单元,用于根据所述车辆的驾驶行为监测对应的盲区信息,从而可以根据车辆的驾驶行为显示车辆对应的盲区图像,降低或避免交通事故的发生,提高车辆行驶安全性。

用于车辆的行驶控制系统.pdf
用于车辆的行驶控制系统包括第一簧上结构加速度传感器、第二簧上结构加速度传感器、第三簧上结构加速度传感器、第四簧上结构加速度传感器以及电子控制单元。电子控制单元被配置成:计算重心位置处的垂直加速度、侧倾加速度和俯仰加速度;计算在右前轮、左前轮、右后轮和左后轮的位置处的簧上结构的垂直加速度;以及基于在右前轮、左前轮、右后轮和左后轮的位置处的簧上结构的垂直加速度来控制车辆的行驶。

车辆及其行驶装置.pdf
本发明提供一种车辆及其行驶装置,所述行驶装置具有:转向架(11),其支承安装了行驶轮(3)的车轴(5);悬架框(15),其以转向架(11)为基准配置在车体(1)的中央侧,并具有自车体(1)向下方延伸的垂下部(16);上连杆(14a)及下连杆(14b),其将垂下部(16)和转向架(11)这两者连结为,使转向架(11)能够相对于垂下部(16)向上下方向位移。下连杆(14b)中,下连杆(14b)与转向架(11)通过销结合连结的位置(11b)比下连杆(14b)与垂下部(16)通过销结合连结的位置(15b)更靠下方