
巡线机器人越障装置.pdf

一条****淑淑

1/10

2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

巡线机器人越障装置.pdf
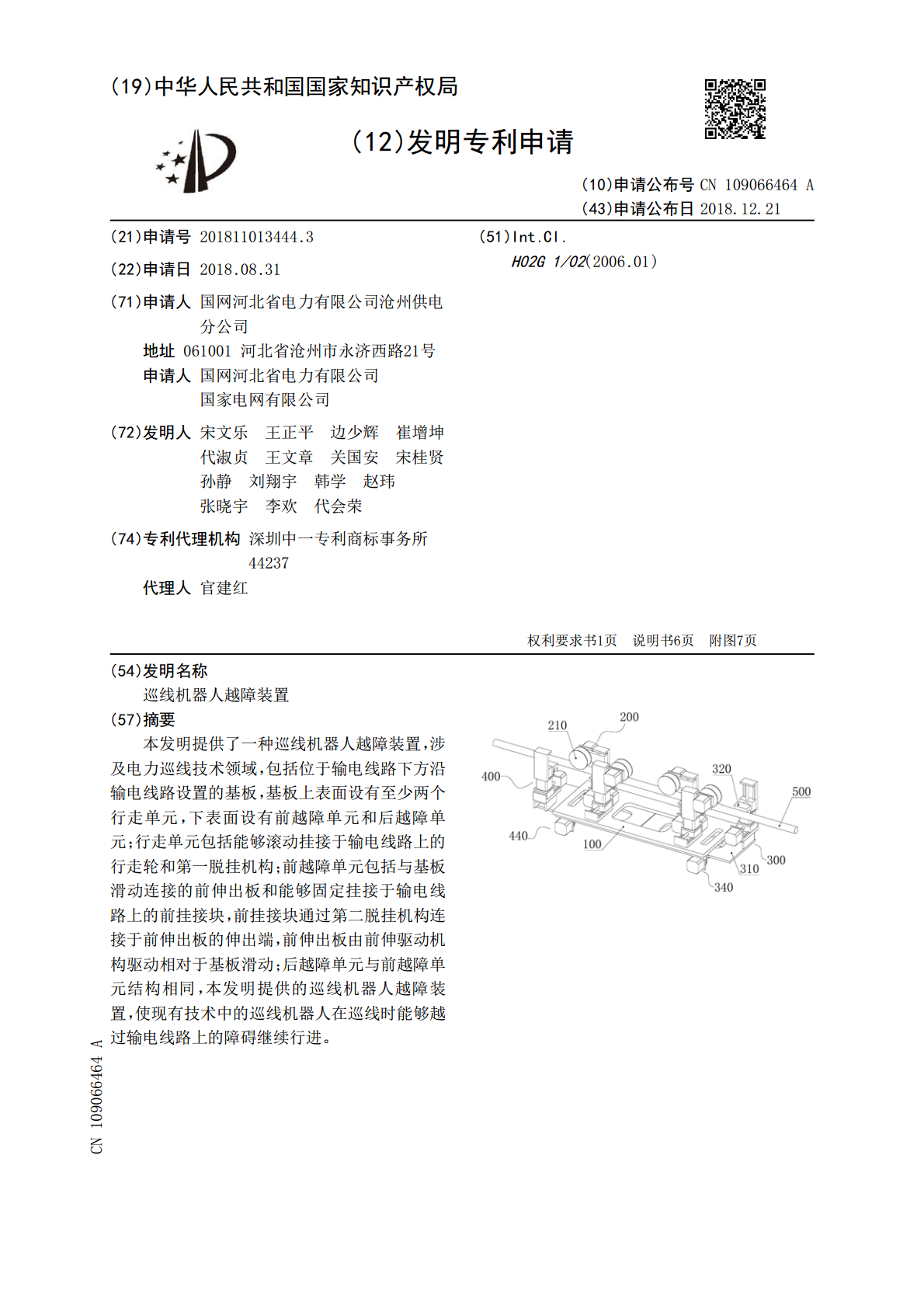
本发明提供了一种巡线机器人越障装置,涉及电力巡线技术领域,包括位于输电线路下方沿输电线路设置的基板,基板上表面设有至少两个行走单元,下表面设有前越障单元和后越障单元;行走单元包括能够滚动挂接于输电线路上的行走轮和第一脱挂机构;前越障单元包括与基板滑动连接的前伸出板和能够固定挂接于输电线路上的前挂接块,前挂接块通过第二脱挂机构连接于前伸出板的伸出端,前伸出板由前伸驱动机构驱动相对于基板滑动;后越障单元与前越障单元结构相同,本发明提供的巡线机器人越障装置,使现有技术中的巡线机器人在巡线时能够越过输电线路上的障
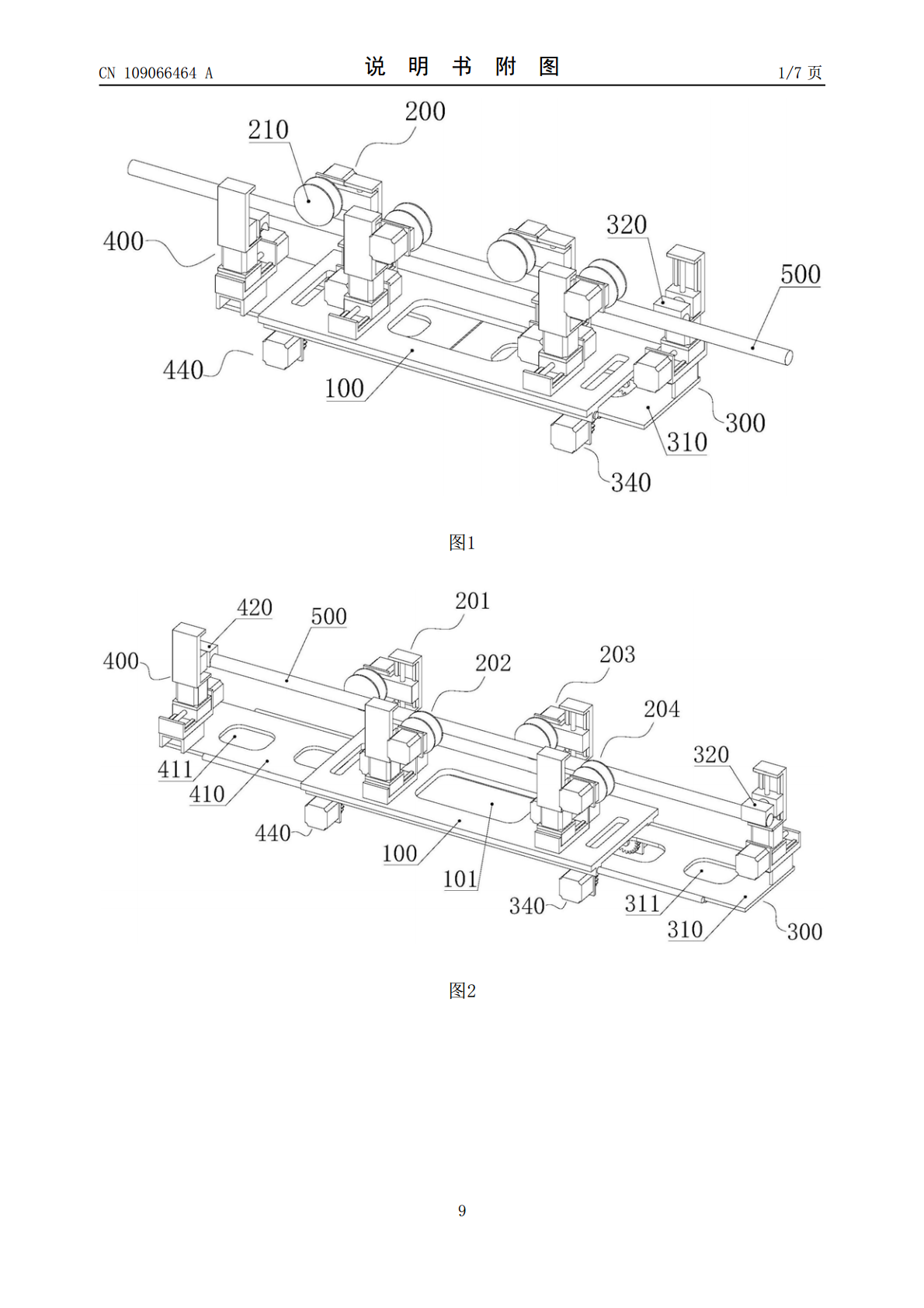
水平双分裂导线巡线机器人行走越障装置.pdf
本发明公开了一种水平双分裂导线巡线机器人行走越障装置,包括两个驱动槽轮、两个随动槽轮、四个保护槽轮和机架。两个驱动槽轮通过驱动轴连接并安装在机架前部下方,轮间距与导线的间距相等,两个随动槽轮分别安装在两个驱动槽轮正后方的机架上,形成四个上层槽轮;四个保护槽轮由四个弹性升降轮轴机构分别定位于四个上层槽轮的后下方位置并形成两两一组的下层槽轮;四个弹性升降轮轴机构两两一组,分别固定在机架两侧。使用时,上层槽轮骑在水平双分裂导线上,下层槽轮勾住导线,越障装置在水平双分裂导线上前行,当同一轴线的槽轮通过间隔棒的连接

巡线机器人越障行为的模糊控制研究.docx
巡线机器人越障行为的模糊控制研究巡线机器人是一种能够自主行驶的机器人,可以用于巡视地下管线、工厂、学校等公共设施,可以有效减轻人工巡视的压力,提高巡视的效率。然而,巡线机器人在行驶过程中会遇到各种困难,如道路障碍物等,这就需要其具备避障能力。本文将探讨巡线机器人的越障行为模糊控制研究。一、越障行为的研究背景目前,巡线机器人通常采用红外线传感器进行越线,但是在越过障碍物的场景中,仅仅使用红外线传感器会缺乏对高度、宽度等越障难度的判断,导致机器人难以顺利通过障碍。因此,越障行为的研究成为解决该问题的重要途径。

实现越障巡线机器人的行走机构.pdf
实现越障巡线机器人的行走机构,涉及一种机器人。提供可使巡线机器人在缆线上行走时能平稳、快速、全自动翻越架空线上的障碍物的一种实现越障巡线机器人的行走机构。设有吊仓、吊臂、齿轮、上下直流减速电机、上下皮带、行走轮臂、压紧弹簧、U形支架、上下行走轮;吊仓内设有检测装置和U型支架转动伺服系统,U型支架转动伺服系统通过吊臂与设于吊臂中间的齿轮连接,通过驱动齿轮转动实现U形支架的±90度旋转;U形支架通过压紧弹簧与行走轮臂连接;行走轮臂上设有铰链弹簧压紧机构;上直流减速电机通过上皮带与上行走轮连接,下直流减速电机通

一种巡线机器人跨越障碍滑移机构及巡线机器人设备.pdf
本发明涉及一种巡线机器人跨越障碍滑移机构,包括:沿输电线缆方向顺次安装在设备机架内的至少三组滑移组件,每组滑移组件均具有用于悬挂在输电线缆上随设备机架的带动而滑移的滑移挂轮;且所述滑移机构还包括:设置在位于前侧的滑移组件上用于检测线路障碍的检测反馈单元;以及信号控制单元,用于根据线路障碍检测结果发送控制信号给所述至少三组滑移组件,以沿输电线缆方向依次控制每组滑移组件的滑移挂轮脱离所述输电线缆以跨越所述线路障碍。本发明的巡线机器人跨越障碍滑移机构及巡线机器人设备通过悬挂于输电线缆上的滑移挂轮支撑设备整体重量