
实现越障巡线机器人的行走机构.pdf

书生****aa


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

实现越障巡线机器人的行走机构.pdf
实现越障巡线机器人的行走机构,涉及一种机器人。提供可使巡线机器人在缆线上行走时能平稳、快速、全自动翻越架空线上的障碍物的一种实现越障巡线机器人的行走机构。设有吊仓、吊臂、齿轮、上下直流减速电机、上下皮带、行走轮臂、压紧弹簧、U形支架、上下行走轮;吊仓内设有检测装置和U型支架转动伺服系统,U型支架转动伺服系统通过吊臂与设于吊臂中间的齿轮连接,通过驱动齿轮转动实现U形支架的±90度旋转;U形支架通过压紧弹簧与行走轮臂连接;行走轮臂上设有铰链弹簧压紧机构;上直流减速电机通过上皮带与上行走轮连接,下直流减速电机通
一种巡线机器人跨越障碍行走机构及巡线机器人设备.pdf
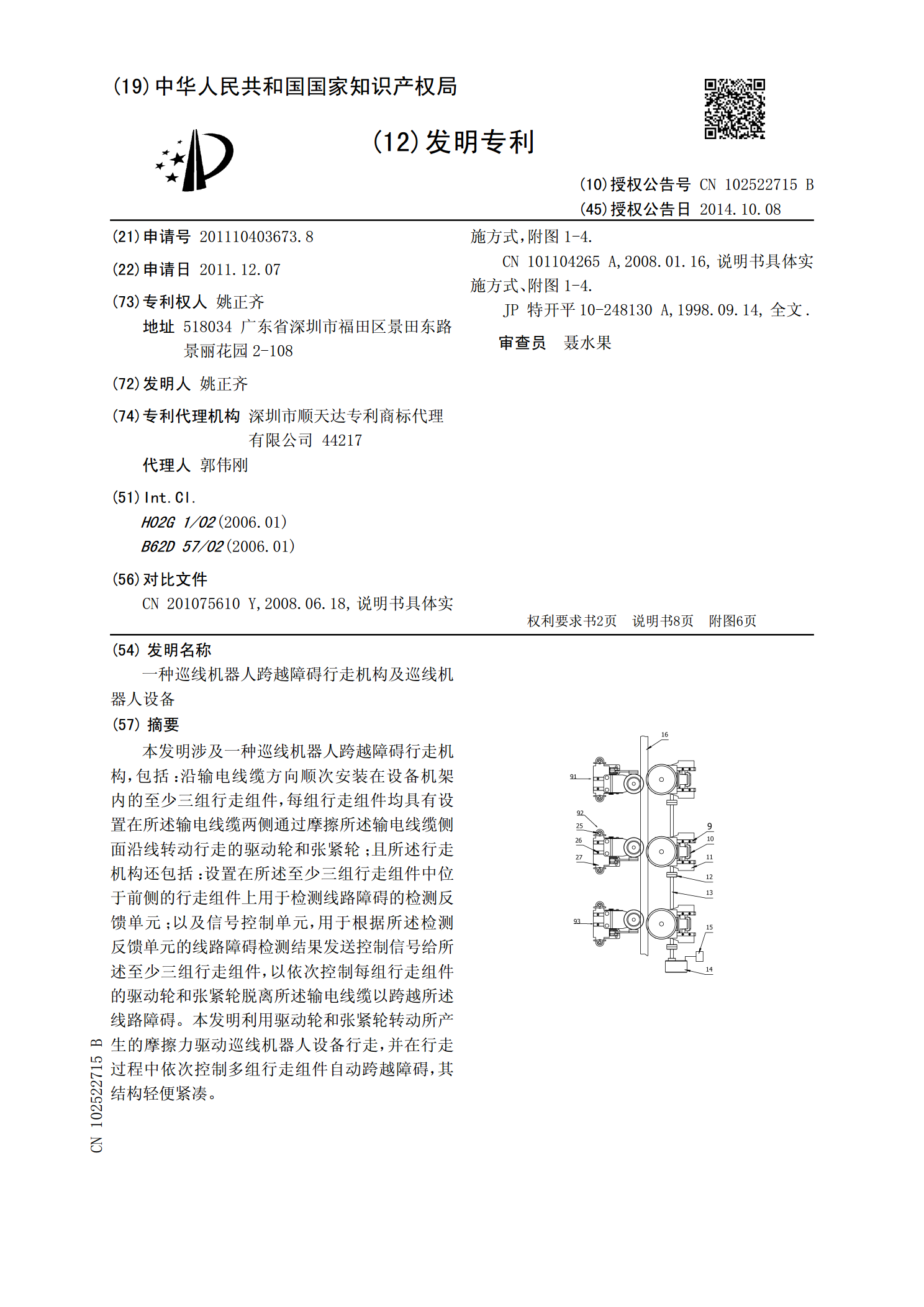
本发明涉及一种巡线机器人跨越障碍行走机构,包括:沿输电线缆方向顺次安装在设备机架内的至少三组行走组件,每组行走组件均具有设置在所述输电线缆两侧通过摩擦所述输电线缆侧面沿线转动行走的驱动轮和张紧轮;且所述行走机构还包括:设置在所述至少三组行走组件中位于前侧的行走组件上用于检测线路障碍的检测反馈单元;以及信号控制单元,用于根据所述检测反馈单元的线路障碍检测结果发送控制信号给所述至少三组行走组件,以依次控制每组行走组件的驱动轮和张紧轮脱离所述输电线缆以跨越所述线路障碍。本发明利用驱动轮和张紧轮转动所产生的摩擦力

行走机构、巡线机器人机械结构及其越障方法.pdf
本发明公开了一种行走机构、巡线机器人机械结构及其越障方法,属于机器人技术领域。所述巡线机器人机械结构包括机架,所述机架上设置有行走轮和夹紧轮组合式行走机构,所述行走轮和夹紧轮组合式行走机构包括至少一个行走单元,所述行走单元包括一对行走剖分轮,所述行走剖分轮包括主动行走剖分轮和被动行走剖分轮,所述主动行走剖分轮和被动行走剖分轮的下方分别设置有第一行走轮臂和第二行走轮臂;所述行走剖分轮下方设置有与之配合夹紧线路的一对夹紧剖分轮,所述夹紧剖分轮包括第一夹紧剖分轮和第二夹紧剖分轮。与现有技术相比,本发明具有减轻劳
行走机构、巡线机器人机械结构及其越障方法.pdf
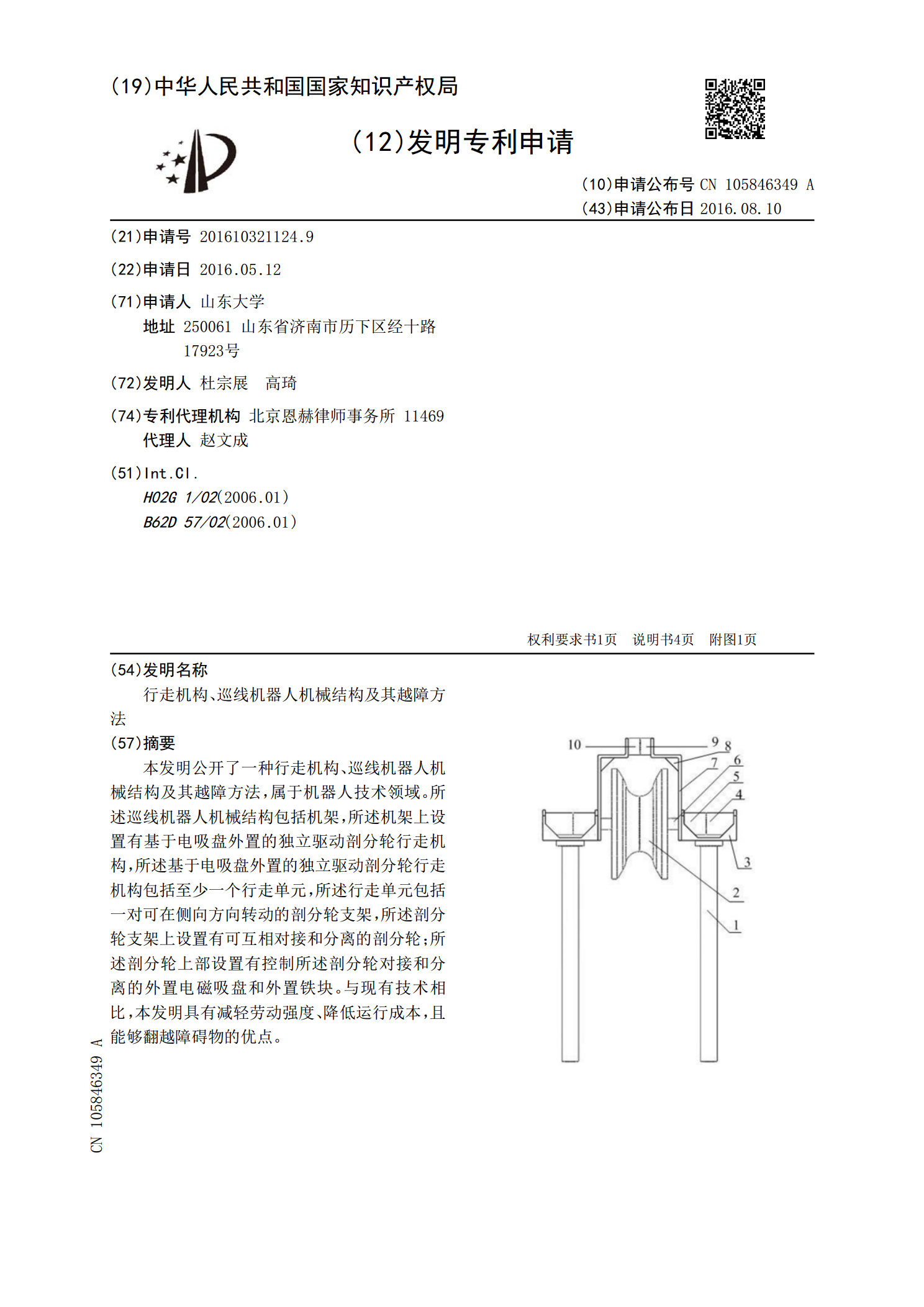
本发明公开了一种行走机构、巡线机器人机械结构及其越障方法,属于机器人技术领域。所述巡线机器人机械结构包括机架,所述机架上设置有基于电吸盘外置的独立驱动剖分轮行走机构,所述基于电吸盘外置的独立驱动剖分轮行走机构包括至少一个行走单元,所述行走单元包括一对可在侧向方向转动的剖分轮支架,所述剖分轮支架上设置有可互相对接和分离的剖分轮;所述剖分轮上部设置有控制所述剖分轮对接和分离的外置电磁吸盘和外置铁块。与现有技术相比,本发明具有减轻劳动强度、降低运行成本,且能够翻越障碍物的优点。

行走机构、巡线机器人机械结构及其越障方法.pdf
本发明公开了一种行走机构、巡线机器人机械结构及其越障方法,属于机器人技术领域。所述巡线机器人机械结构包括机架,所述机架上设置有行走轮和夹紧轮组合式行走机构,所述行走轮和夹紧轮组合式行走机构包括至少一个行走单元,所述行走单元包括一对行走剖分轮,所述行走剖分轮包括主动行走剖分轮和被动行走剖分轮,所述主动行走剖分轮和被动行走剖分轮的下方分别设置有第一行走轮臂和第二行走轮臂;所述行走剖分轮下方设置有夹紧剖分轮,所述夹紧剖分轮包括第一夹紧剖分轮和第二夹紧剖分轮,所述各夹紧剖分轮的下端均设置有丝杠电机和丝杠。与现有技