
机器人行走结构及具有其的机器人.pdf

斌斌****公主


1/9

2/9

3/9

4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人行走结构及具有其的机器人.pdf
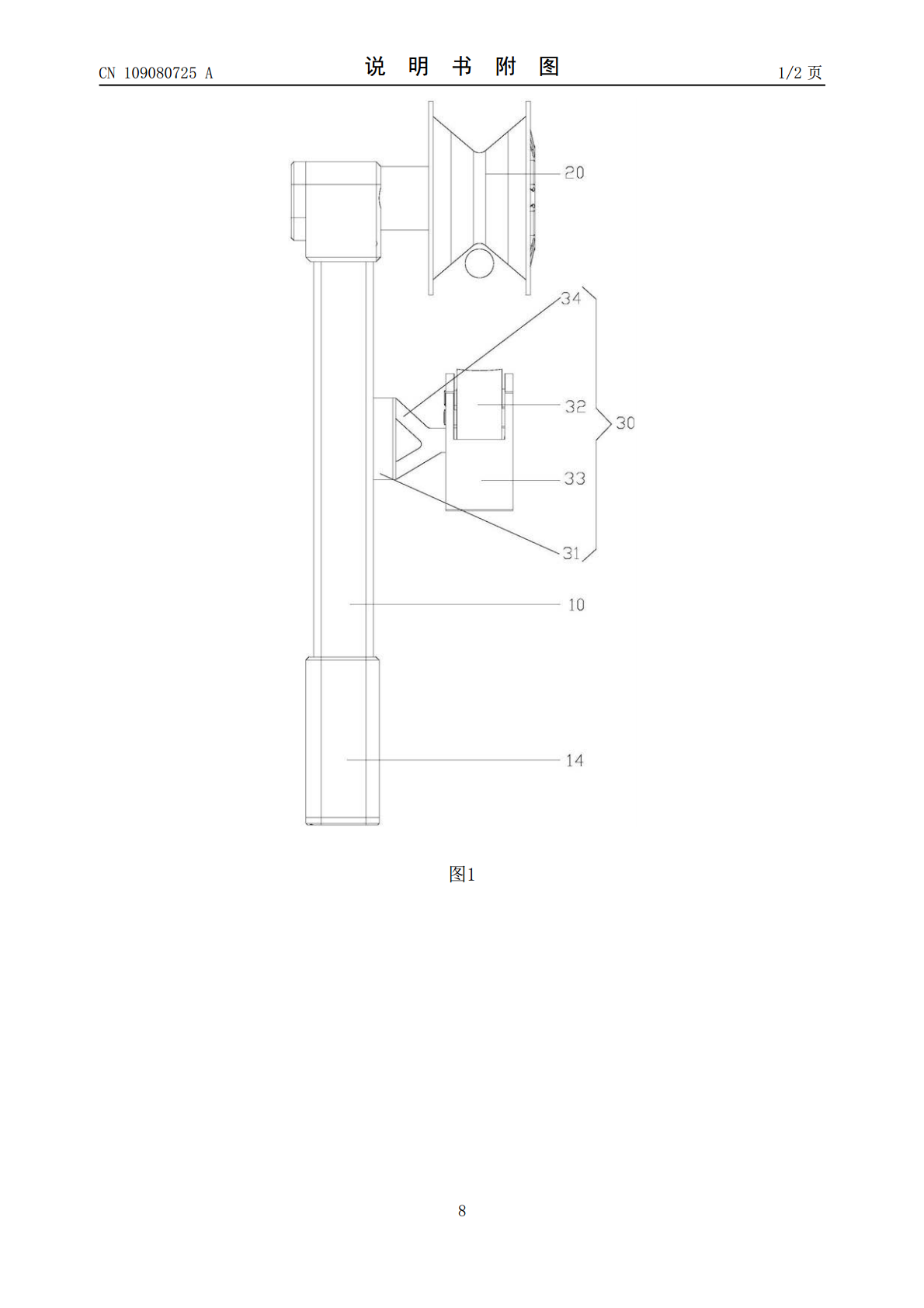
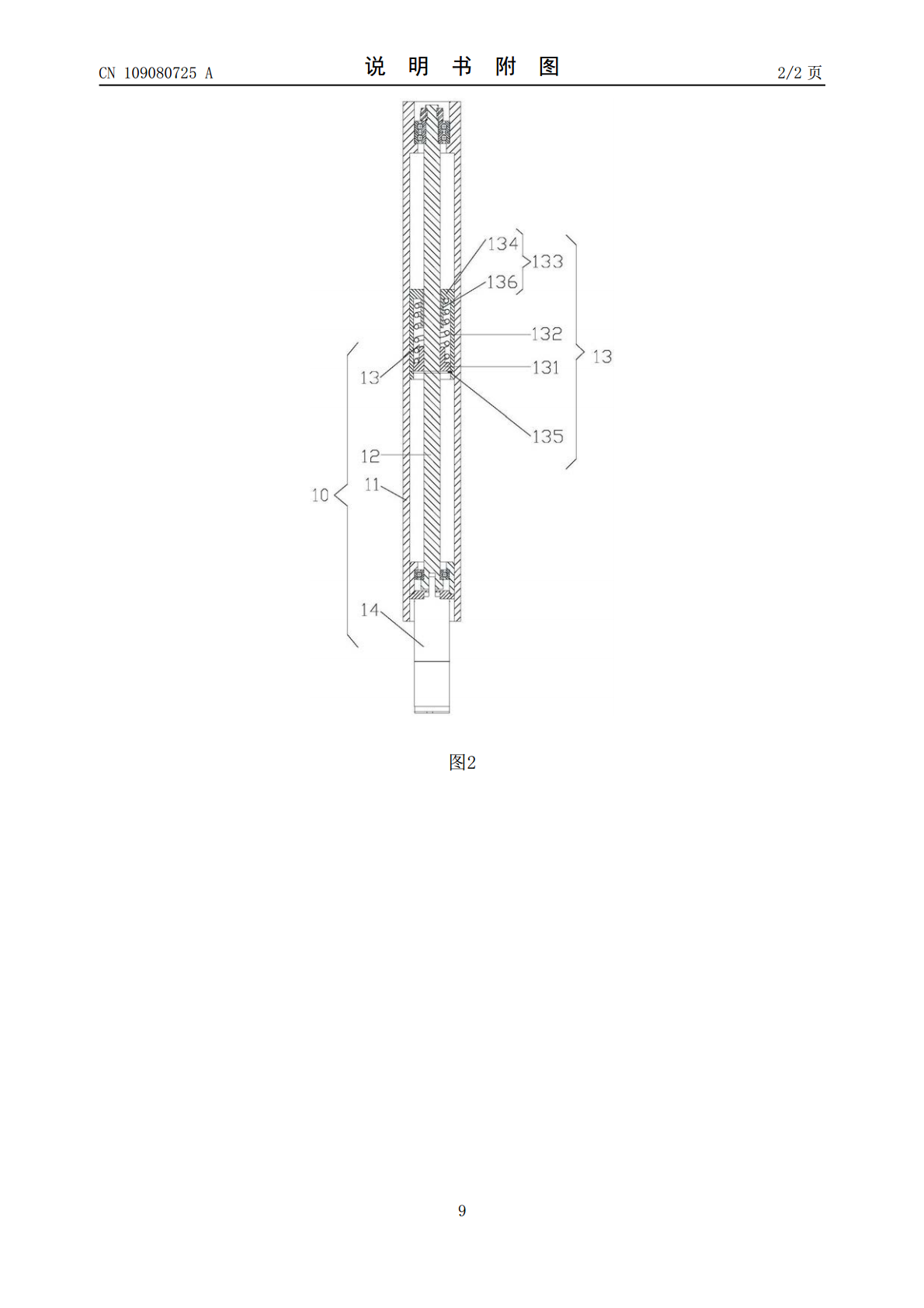
本发明提供了一种机器人行走结构及具有其的机器人,包括:连接柱组件,连接柱组件包括连接柱、丝杠、滑块机构和第一驱动电机,连接柱为中空结构,丝杠设置在连接柱内,第一驱动电机与丝杠相连以驱动丝杠转动,滑块机构设置在丝杠上,滑块机构包括移动座、弹性件和连接块,移动座具有与丝杠相适配的螺纹,弹性件设置在连接块与移动座之间,移动座和连接块可相对移动,移动座和连接块通过限位件进行限位以避免连接块脱离移动座;行走轮组件,行走轮组件设置在连接柱组件上;压紧组件,压紧组件与连接块相连。本发明的技术方案有效地解决了现有技术中的

躯体结构及具有其的机器人.pdf
本发明提供了一种躯体结构及具有其的机器人,其中,躯体结构包括相连接的支撑梁、躯体骨架和头部连接组件,支撑梁、躯体骨架和头部连接组件共同围成容纳空间,其中,躯体结构还包括:障碍物探测部,障碍物探测部设置在躯体骨架上以探测躯体结构的周围的障碍物。

布线结构及具有其的机器人.pdf
本发明提供了一种布线结构及具有其的机器人,布线结构设置在机器人的连接臂组件内并固定在连接臂组件的底板上,用于安装过线防护套并容纳套设在过线防护套上的从动轮,布线结构包括:布线主体,布线主体具有相对设置的第一端面和第二端面,第二端面上设置有容纳腔体且容纳腔体朝向第一端面延伸,以容纳过线防护套的至少部分和从动轮;其中,容纳腔体具有腔体顶壁和环绕腔体顶壁设置的腔体内壁,腔体顶壁与第一端面之间开设有连通孔,以使过线防护套插设在连通孔内。本发明的布线结构解决了现有技术中的机器人内部线缆的布线问题。
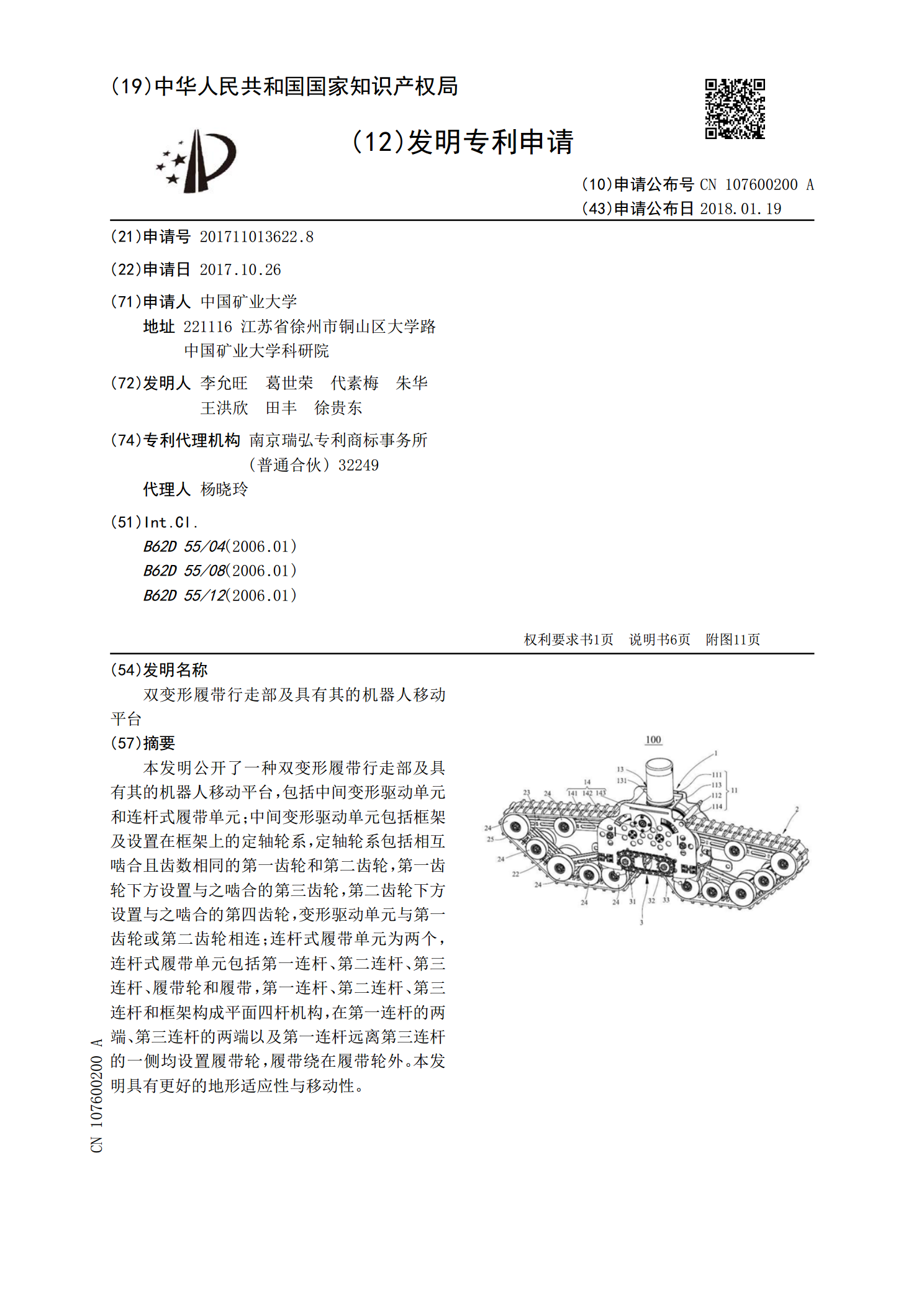
双变形履带行走部及具有其的机器人移动平台.pdf
本发明公开了一种双变形履带行走部及具有其的机器人移动平台,包括中间变形驱动单元和连杆式履带单元;中间变形驱动单元包括框架及设置在框架上的定轴轮系,定轴轮系包括相互啮合且齿数相同的第一齿轮和第二齿轮,第一齿轮下方设置与之啮合的第三齿轮,第二齿轮下方设置与之啮合的第四齿轮,变形驱动单元与第一齿轮或第二齿轮相连;连杆式履带单元为两个,连杆式履带单元包括第一连杆、第二连杆、第三连杆、履带轮和履带,第一连杆、第二连杆、第三连杆和框架构成平面四杆机构,在第一连杆的两端、第三连杆的两端以及第一连杆远离第三连杆的一侧均设

整平机器人的行走装置和具有其的整平机器人.pdf
本发明公开了一种整平机器人的行走装置和具有其的整平机器人,所述整平机器人的行走装置包括底盘、行走转向轮组件、转向轮组件,行走转向轮组件包括行走转向轮、第一驱动装置和第二驱动装置,行走转向轮具有第一转轴和第二转轴,第一转轴垂直于底盘,第二转轴平行于底盘,第一驱动装置用于驱动第一转轴转动,第二驱动装置用于驱动第二转轴转动,转向轮组件包括转向轮和第三驱动装置,转向轮具有第三转轴和第四转轴,第三转轴垂直于底盘,第四转轴平行于底盘,第三驱动装置用于驱动第三转轴转动。根据本发明实施例的整平机器人的行走装置,可以较为灵