
转向系统、车辆及转向助力补偿方法.pdf

是秋****写意


1/10
2/10
3/10

4/10
5/10

6/10
7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
转向系统、车辆及转向助力补偿方法.pdf
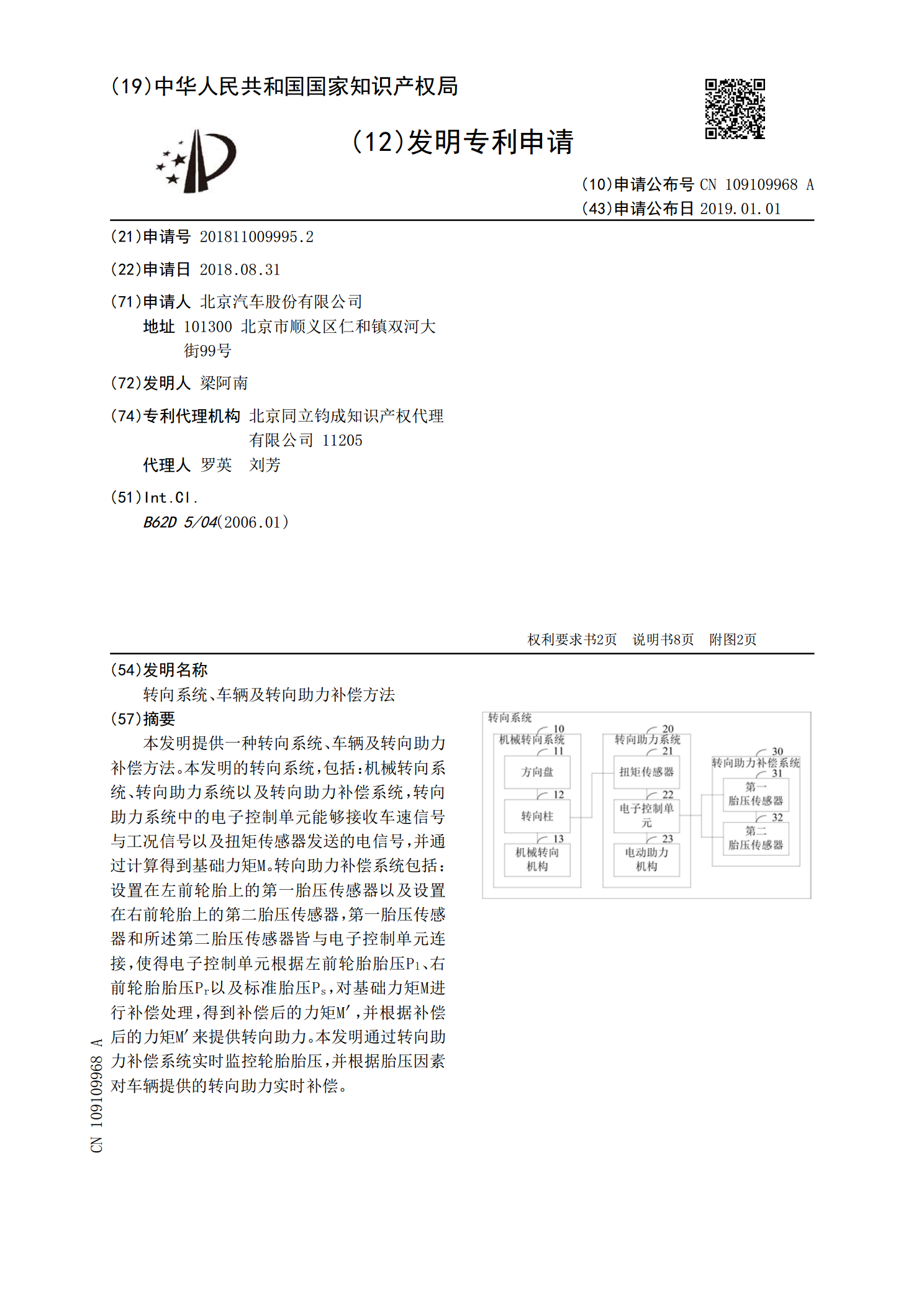
本发明提供一种转向系统、车辆及转向助力补偿方法。本发明的转向系统,包括:机械转向系统、转向助力系统以及转向助力补偿系统,转向助力系统中的电子控制单元能够接收车速信号与工况信号以及扭矩传感器发送的电信号,并通过计算得到基础力矩M。转向助力补偿系统包括:设置在左前轮胎上的第一胎压传感器以及设置在右前轮胎上的第二胎压传感器,第一胎压传感器和所述第二胎压传感器皆与电子控制单元连接,使得电子控制单元根据左前轮胎胎压P
助力转向系统及具有该助力转向系统的车辆.pdf
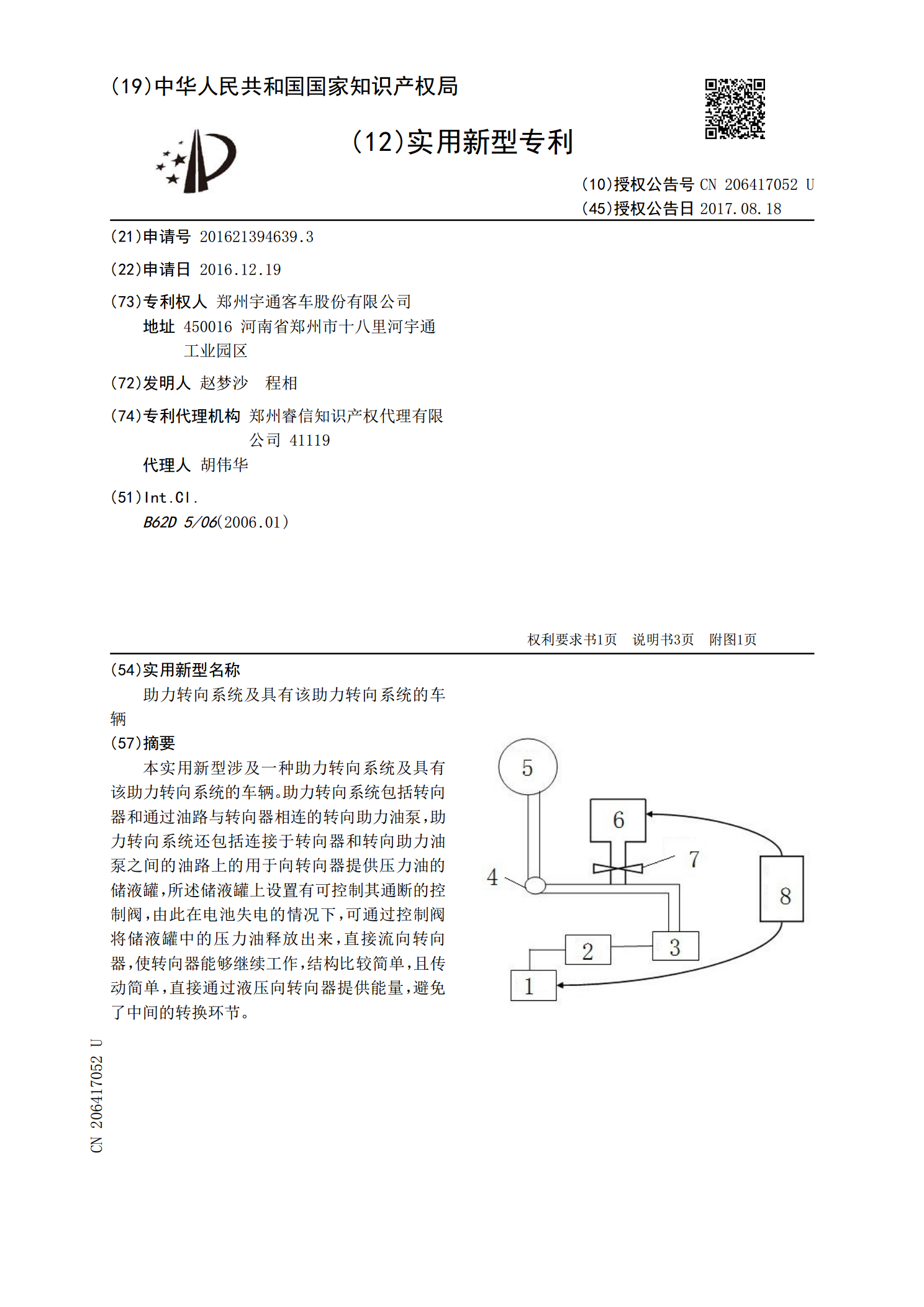
本实用新型涉及一种助力转向系统及具有该助力转向系统的车辆。助力转向系统包括转向器和通过油路与转向器相连的转向助力油泵,助力转向系统还包括连接于转向器和转向助力油泵之间的油路上的用于向转向器提供压力油的储液罐,所述储液罐上设置有可控制其通断的控制阀,由此在电池失电的情况下,可通过控制阀将储液罐中的压力油释放出来,直接流向转向器,使转向器能够继续工作,结构比较简单,且传动简单,直接通过液压向转向器提供能量,避免了中间的转换环节。

力矩补偿方法、助力转向系统及汽车.pdf
本发明公开了一种力矩补偿方法,助力转向系统及汽车;力矩补偿方法:车辆进入直线加速行驶跑偏状态时进入前馈补偿阶段计算获得前馈补偿力矩;满足反馈补偿条件后在最终前馈补偿力矩的基础上进行补偿获得反馈补偿力矩,并将最终前馈补偿力矩叠加反馈补偿力矩后生成补偿力矩;将补偿力矩与助力转向系统的力矩环计算的助力力矩叠加,获得最终助力力矩,并控制助力转向系统的电机输出最终助力力矩。前馈补偿阶段响应快,只要车辆处于直线加速跑偏状态,前馈补偿阶段能立即输出前馈补偿力矩,降低跑偏量;反馈补偿阶段可以将手力降至目标力矩,减小跑偏过
助力转向系统及车辆.pdf
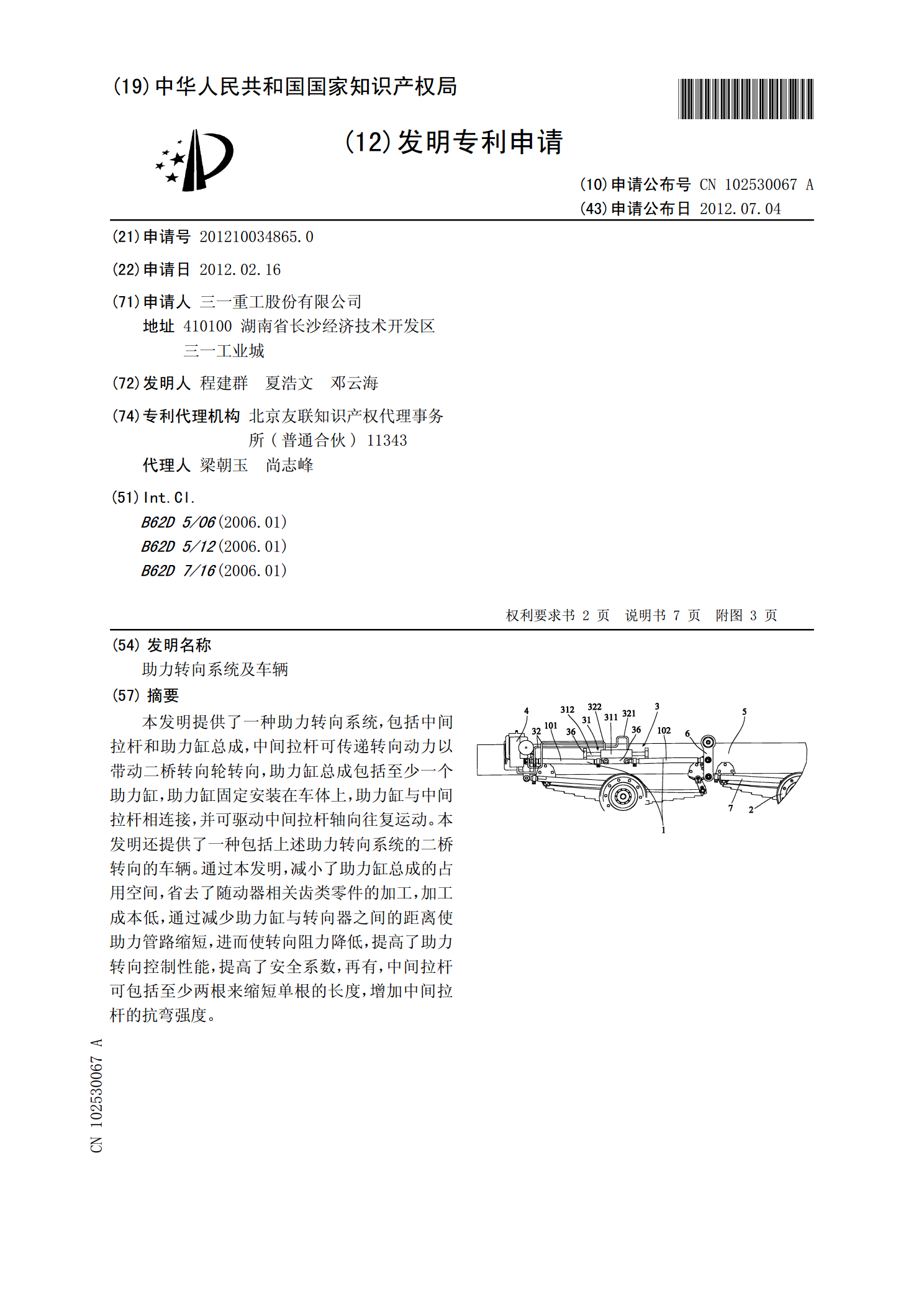
本发明提供了一种助力转向系统,包括中间拉杆和助力缸总成,中间拉杆可传递转向动力以带动二桥转向轮转向,助力缸总成包括至少一个助力缸,助力缸固定安装在车体上,助力缸与中间拉杆相连接,并可驱动中间拉杆轴向往复运动。本发明还提供了一种包括上述助力转向系统的二桥转向的车辆。通过本发明,减小了助力缸总成的占用空间,省去了随动器相关齿类零件的加工,加工成本低,通过减少助力缸与转向器之间的距离使助力管路缩短,进而使转向阻力降低,提高了助力转向控制性能,提高了安全系数,再有,中间拉杆可包括至少两根来缩短单根的长度,增加中间

电动助力转向系统、控制方法及车辆.pdf
本发明公开了一种电动助力转向系统、控制方法及车辆,电动助力转向系统,包括:转向管柱;转向器,转向器与转向管柱相连,转向器包括齿轮和齿条;至少两个助力电机,至少两个助力电机布置在转向管柱、齿轮和齿条中的至少两个上;控制器,用于根据转向所需的助力电流为至少两个助力电机分配相应的助力功率,以及控制至少两个助力电机以对应的助力功率运行。本发明的电动助力转向系统采用了多助力电机,可以根据需求对每一个助力电机分配适当的电流,从而实现电动助力更好的性能,并提升转向助力系统的使用寿命。