
一种轮毂全自动识别装置及轮毂自动识别方法.pdf

小凌****甜蜜


1/10

2/10

3/10

4/10

5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种轮毂全自动识别装置及轮毂自动识别方法.pdf
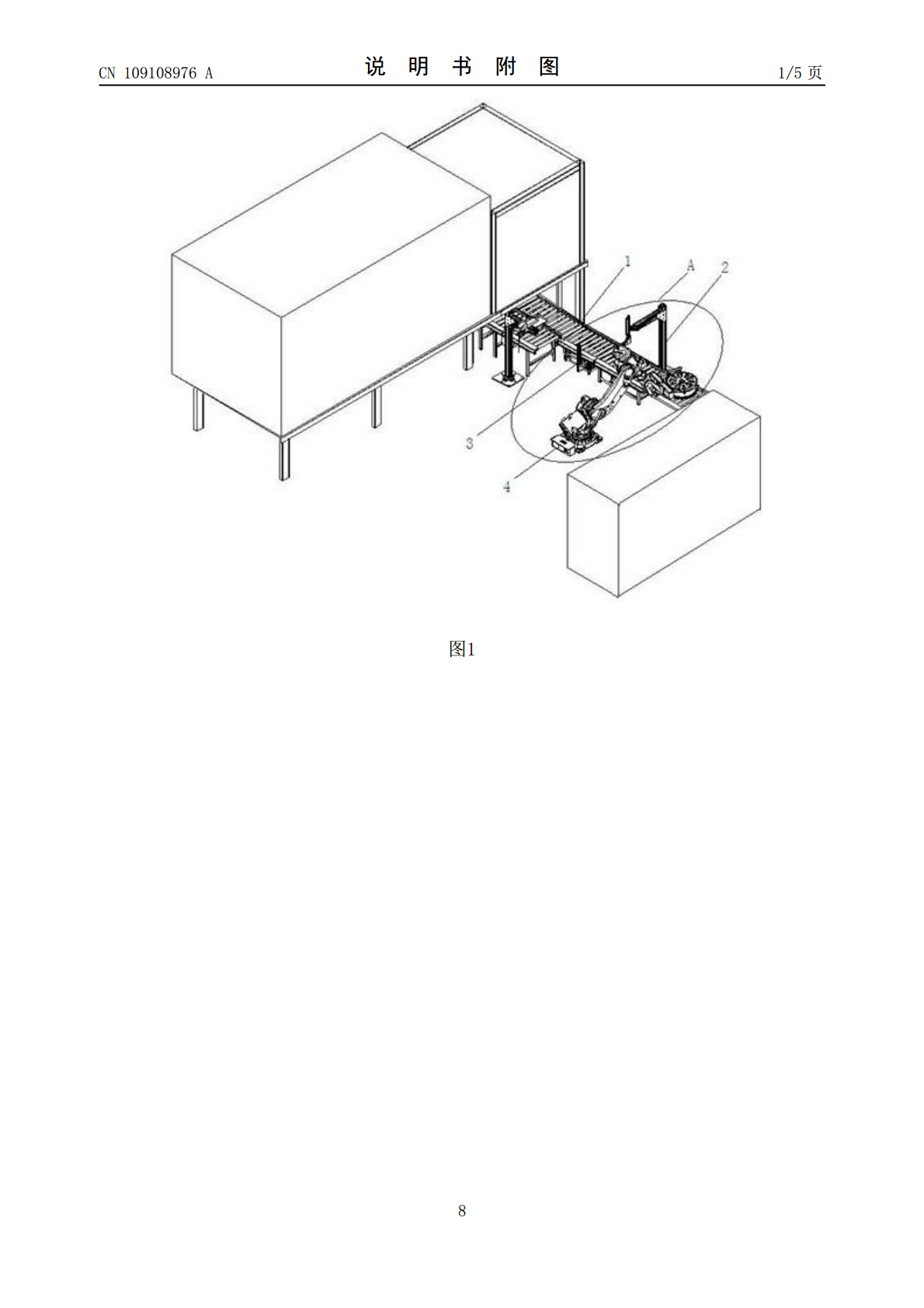
本发明提供了一种轮毂全自动识别装置,包括输送辊道、控制器、初步识别装置和第二识别装置,初步识别装置和第二识别装置沿输送辊道的长度方向间隔设置,初步识别装置包括底板以及与底板的前后两端垂直连接的侧板,侧板上安装有光栅传感器Ⅰ;第二识别装置包括设置在输送辊道一侧的Г形支架,Г形支架上安装有摄像头,光栅传感器Ⅰ、摄像头均分别与控制器电连接。本发明还提供了一种轮毂自动识别方法,能够有效区分不同型号的轮毂,识别准确度高、工作高效,并且能够保证整个工作过程避免发生轮毂之间与轮毂与机械抓手之间的碰撞,操作安全可靠。
一种轮毂全自动标识装置及方法.pdf
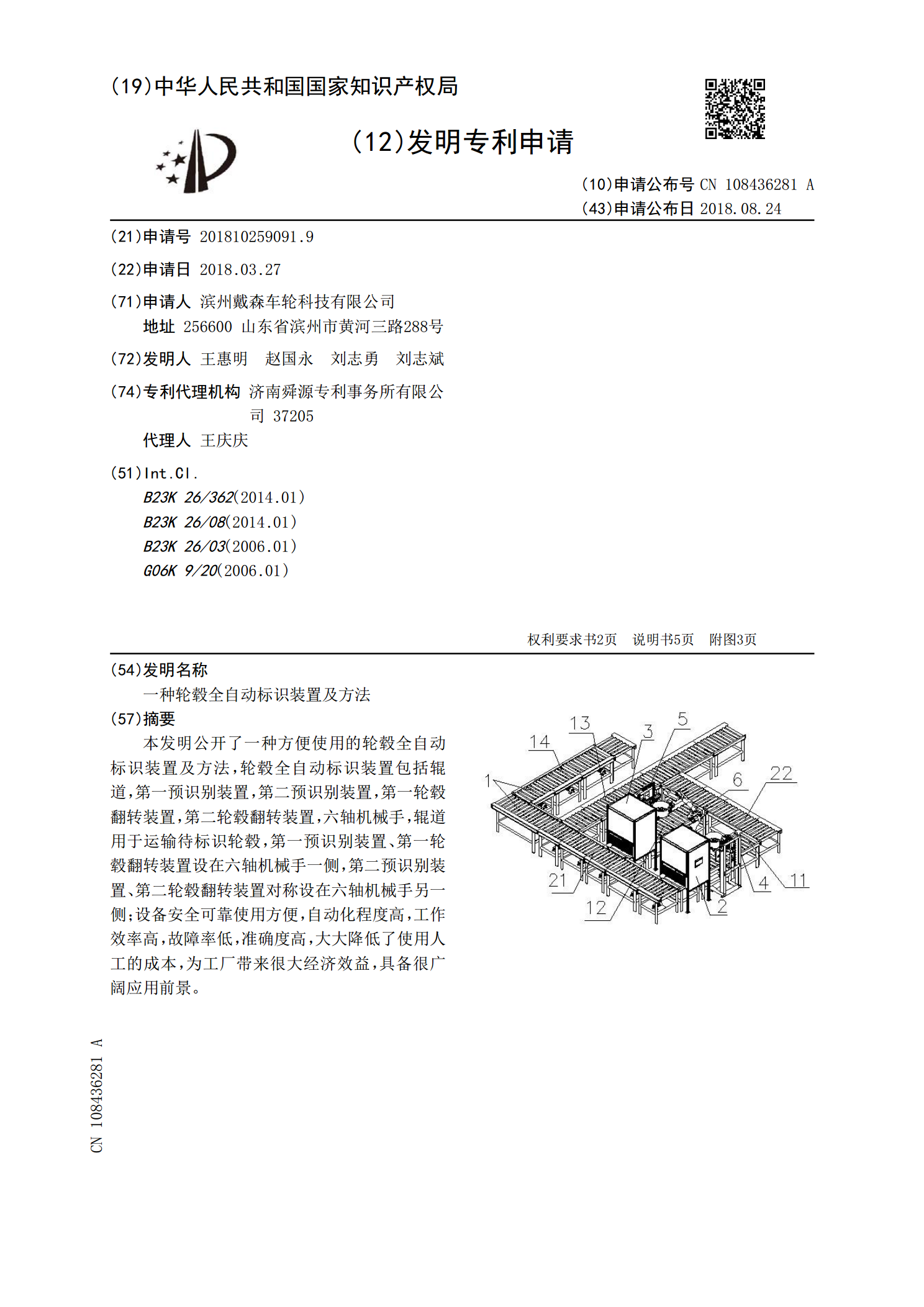
本发明公开了一种方便使用的轮毂全自动标识装置及方法,轮毂全自动标识装置包括辊道,第一预识别装置,第二预识别装置,第一轮毂翻转装置,第二轮毂翻转装置,六轴机械手,辊道用于运输待标识轮毂,第一预识别装置、第一轮毂翻转装置设在六轴机械手一侧,第二预识别装置、第二轮毂翻转装置对称设在六轴机械手另一侧;设备安全可靠使用方便,自动化程度高,工作效率高,故障率低,准确度高,大大降低了使用人工的成本,为工厂带来很大经济效益,具备很广阔应用前景。
一种全自动铝轮毂打标装置.pdf
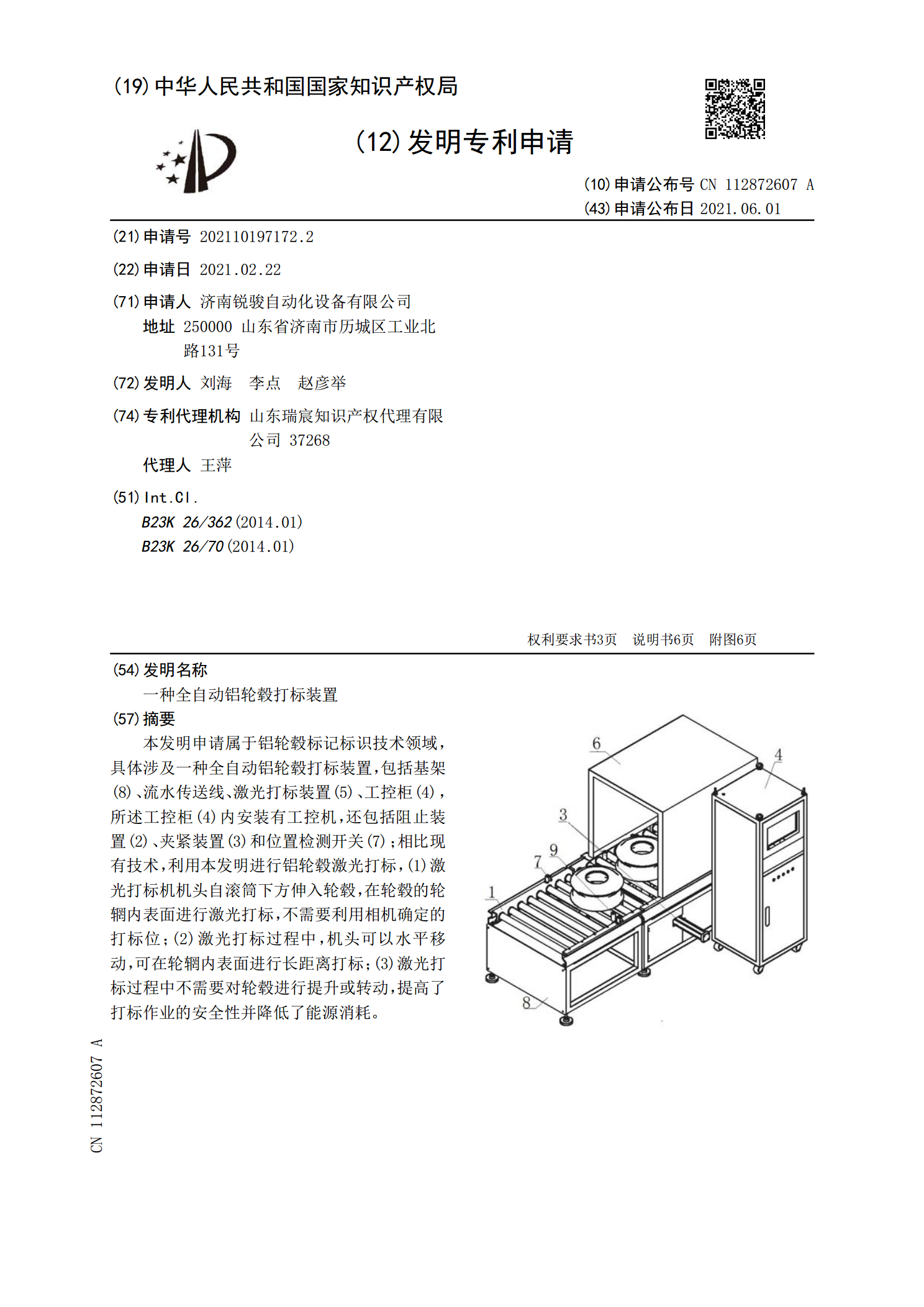
本发明申请属于铝轮毂标记标识技术领域,具体涉及一种全自动铝轮毂打标装置,包括基架(8)、流水传送线、激光打标装置(5)、工控柜(4),所述工控柜(4)内安装有工控机,还包括阻止装置(2)、夹紧装置(3)和位置检测开关(7);相比现有技术,利用本发明进行铝轮毂激光打标,(1)激光打标机机头自滚筒下方伸入轮毂,在轮毂的轮辋内表面进行激光打标,不需要利用相机确定的打标位;(2)激光打标过程中,机头可以水平移动,可在轮辋内表面进行长距离打标;(3)激光打标过程中不需要对轮毂进行提升或转动,提高了打标作业的安全性并

一种轮毂一维码识别装置以及识别方法.pdf
本发明公开了一种轮毂一维码识别装置以及识别方法,属于汽车制造领域,包括轮毂放置架、测距装置、驱动装置、控制器。测距装置根据检测到长度距离判断是一维码的凸起部分还是平面部分。本发明通过测距装置将垂直距离转换为圆周上的一维码凸起的宽度,进而转换为平面的一维码。本发明将位于轮毂上的不便于扫码设备识别的一维码转换为便于扫码设备识别的平面一维码图形,大大提高了轮毂一维码的识别效率和准确度。
一种轮毂型号识别方法.pdf
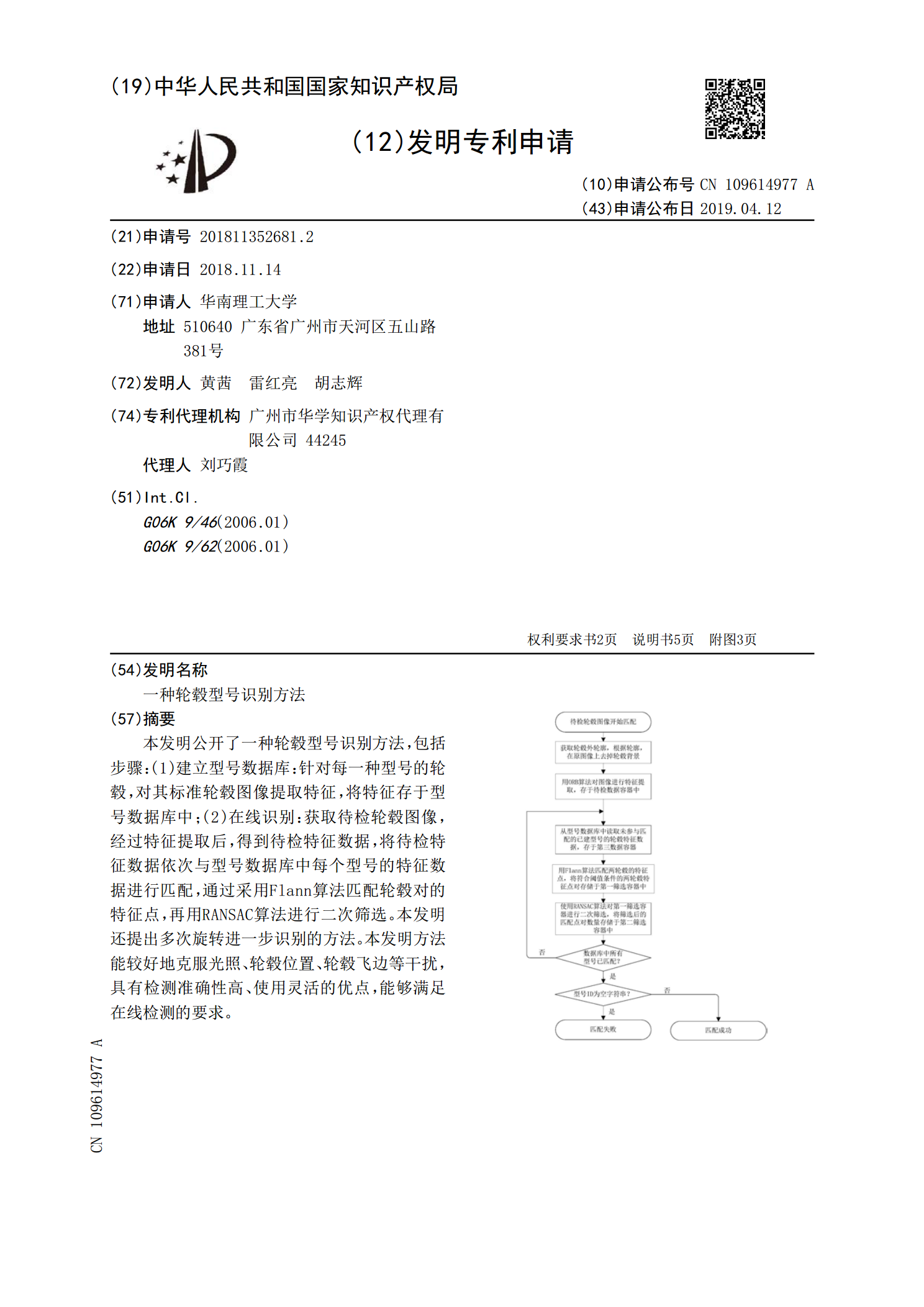
本发明公开了一种轮毂型号识别方法,包括步骤:(1)建立型号数据库:针对每一种型号的轮毂,对其标准轮毂图像提取特征,将特征存于型号数据库中;(2)在线识别:获取待检轮毂图像,经过特征提取后,得到待检特征数据,将待检特征数据依次与型号数据库中每个型号的特征数据进行匹配,通过采用Flann算法匹配轮毂对的特征点,再用RANSAC算法进行二次筛选。本发明还提出多次旋转进一步识别的方法。本发明方法能较好地克服光照、轮毂位置、轮毂飞边等干扰,具有检测准确性高、使用灵活的优点,能够满足在线检测的要求。