
一种仿生蓝点魟水下推进器.pdf

星星****眨眼


1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种仿生蓝点魟水下推进器.pdf
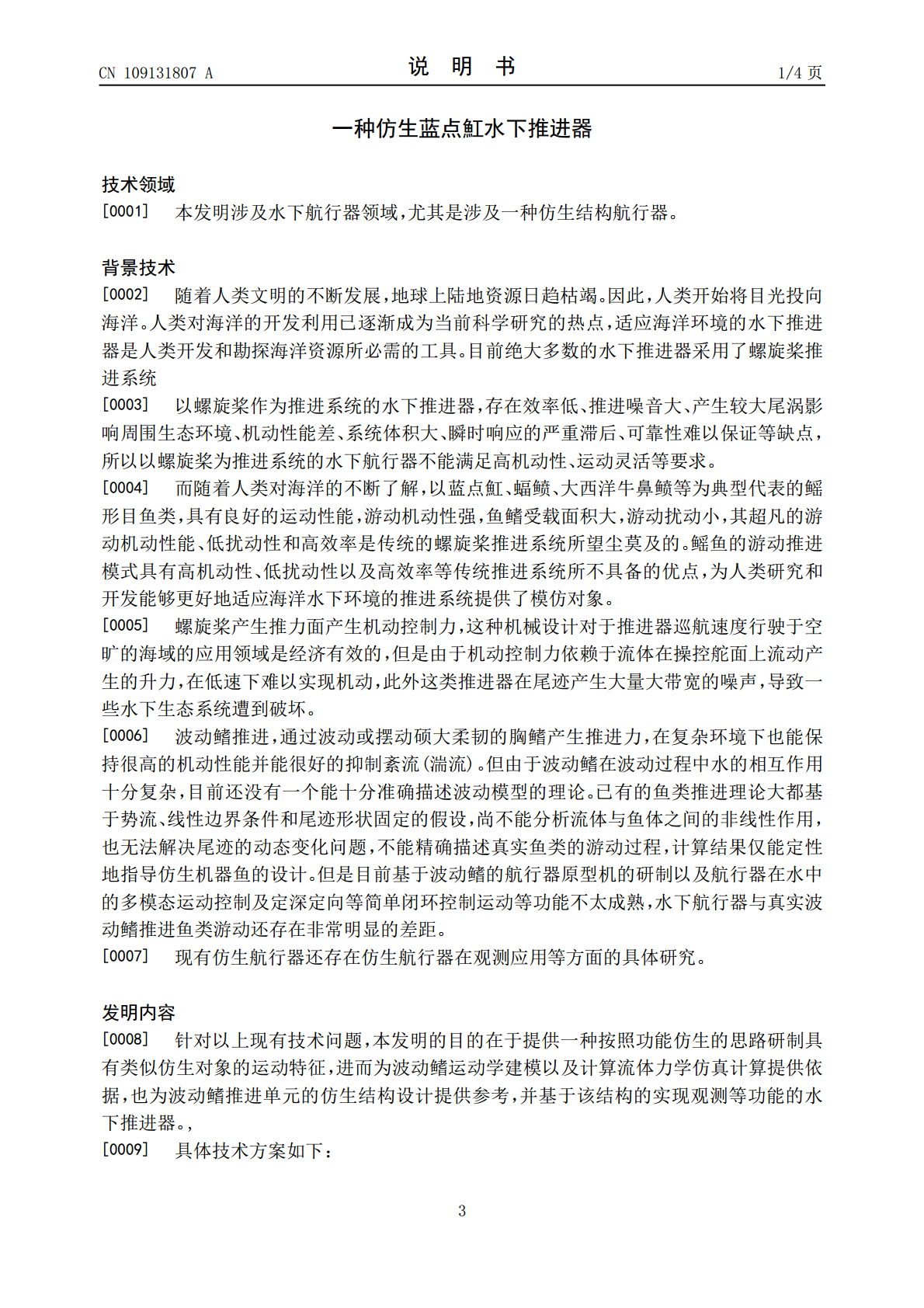
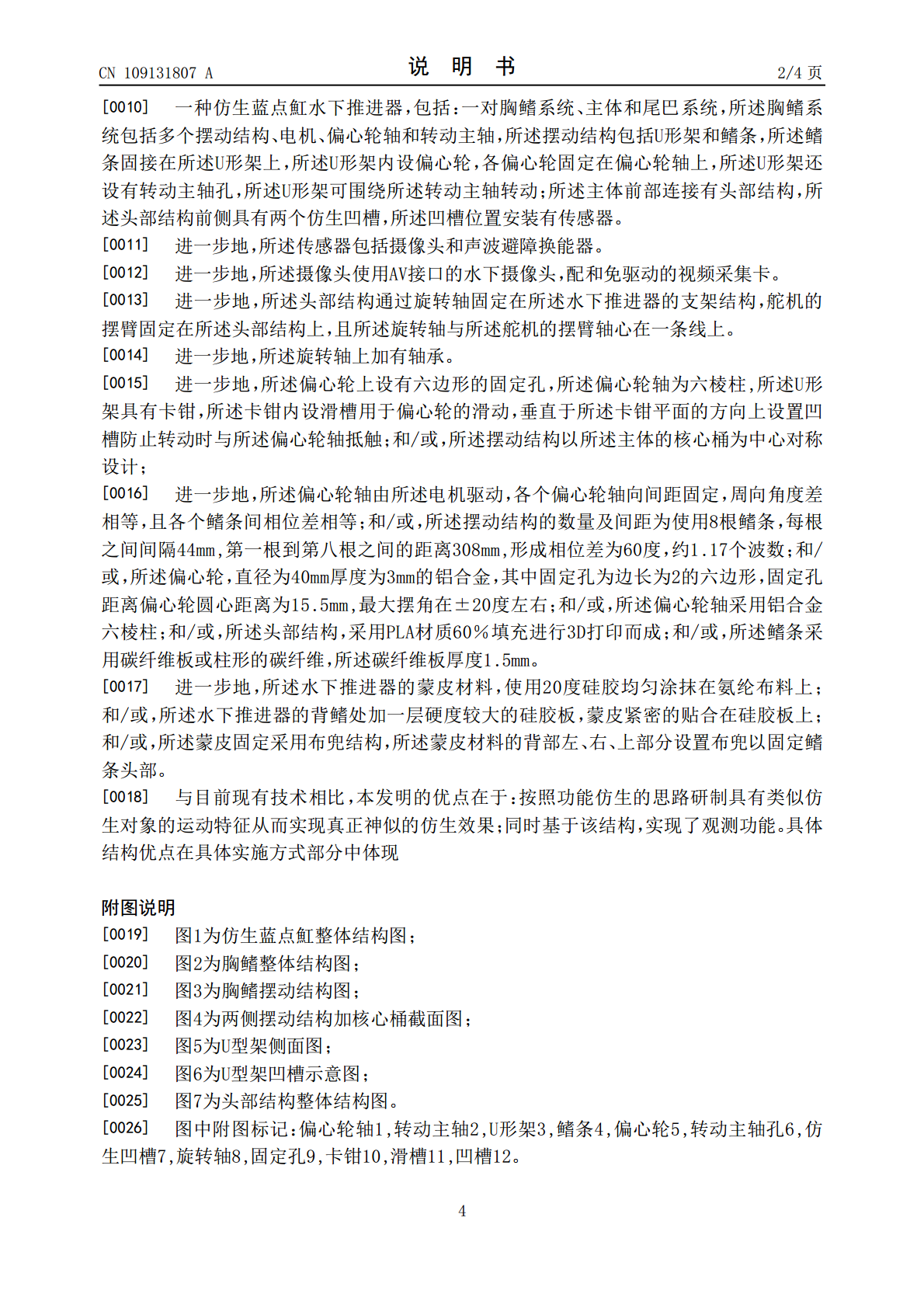
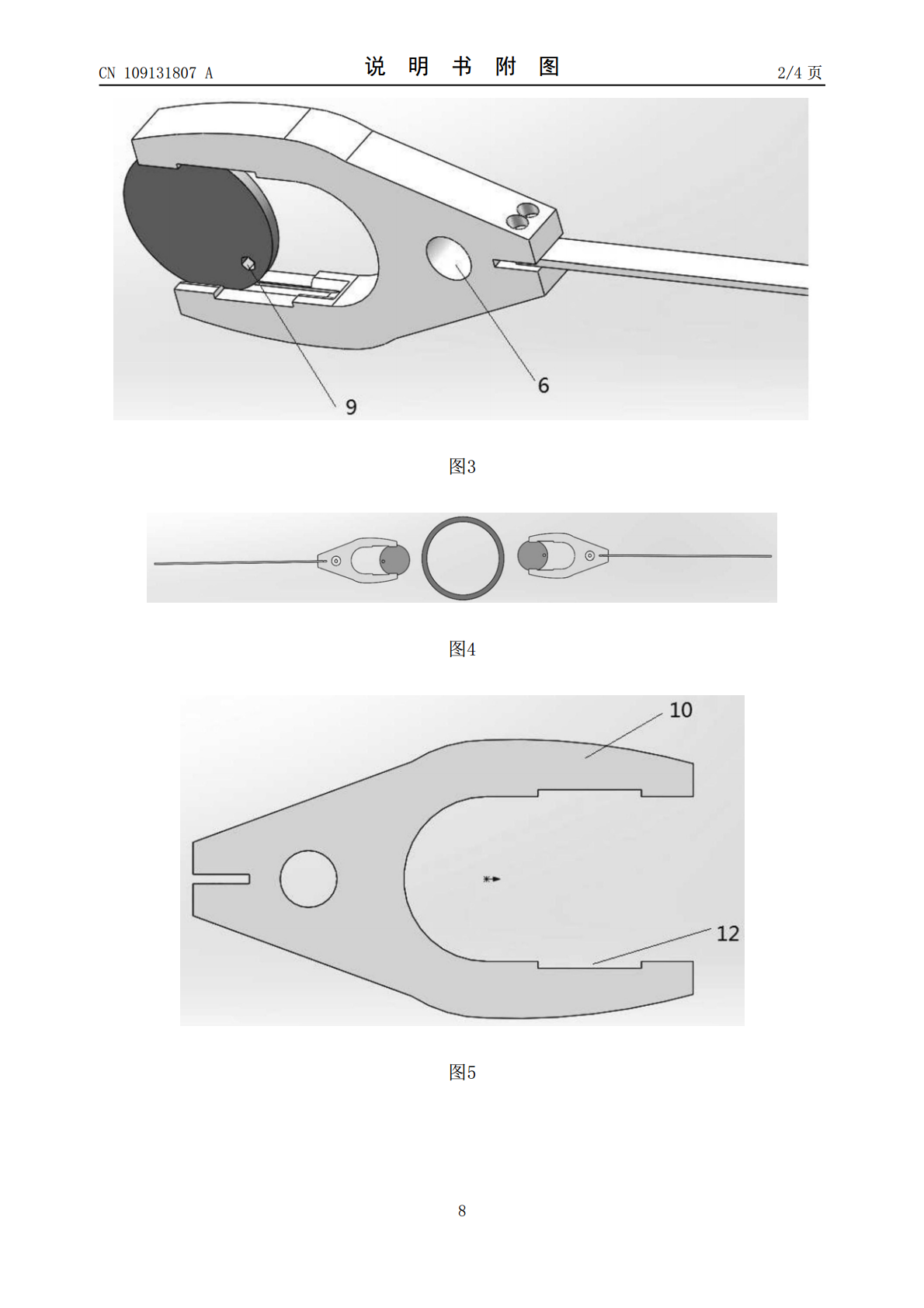
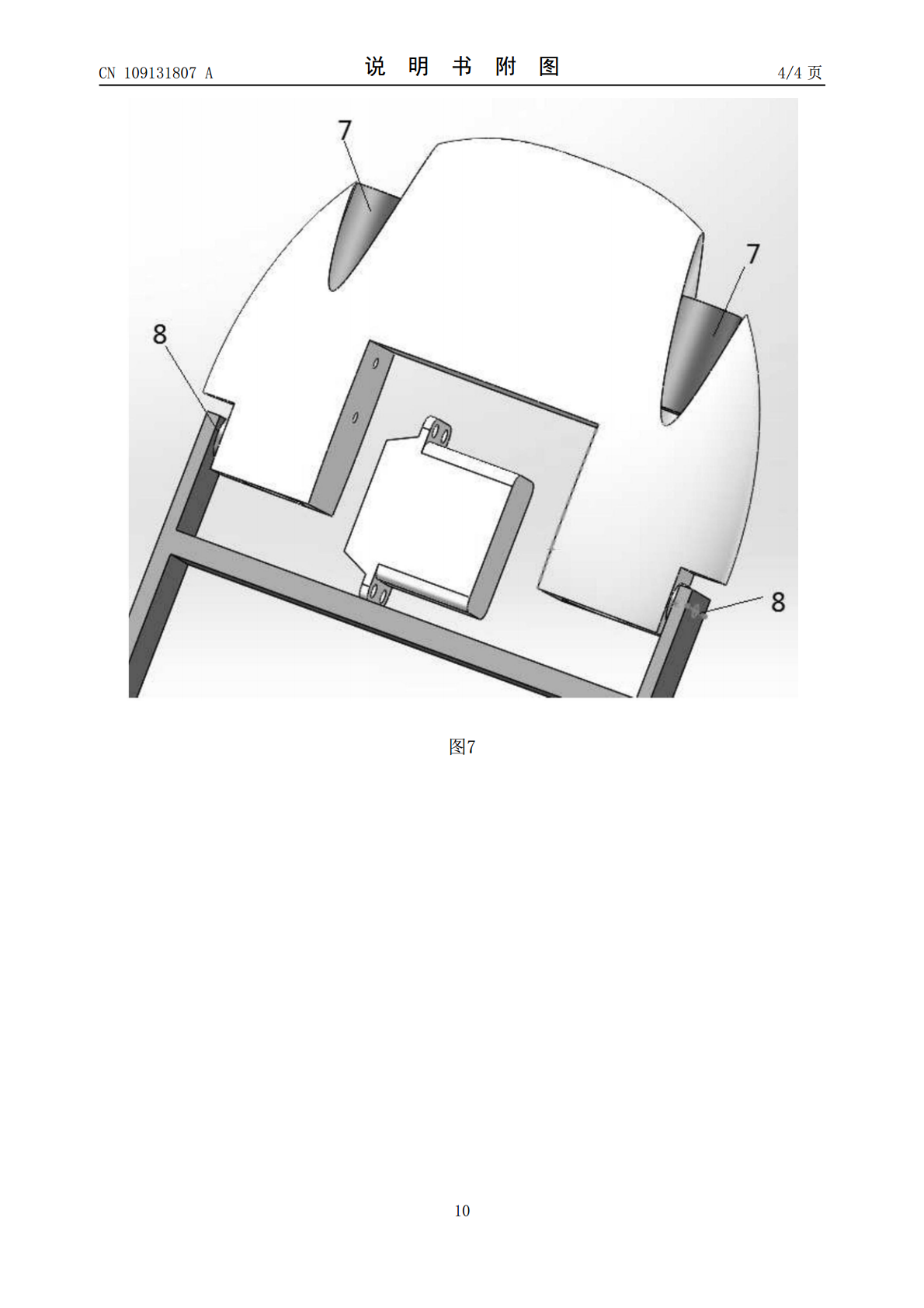
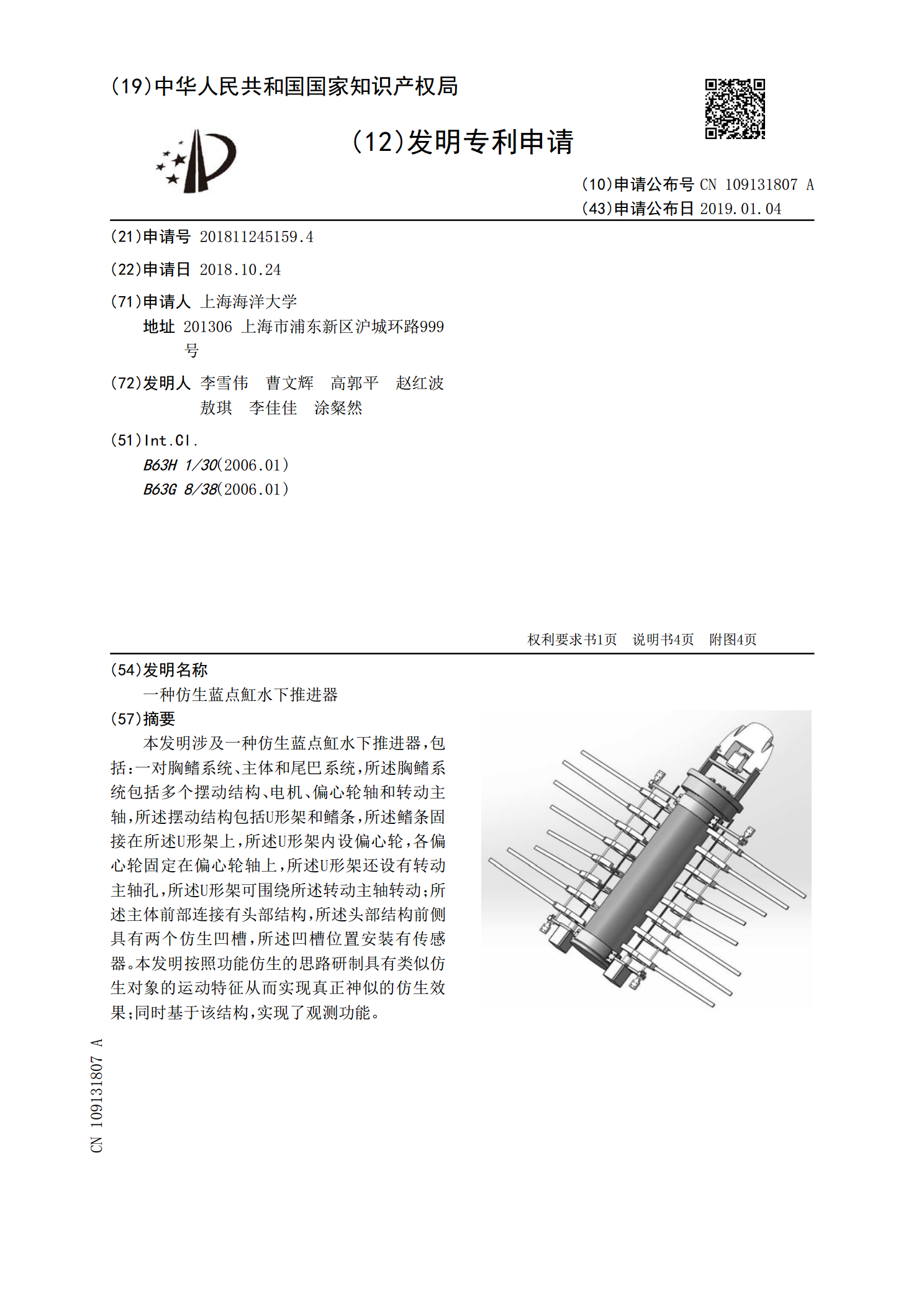
本发明涉及一种仿生蓝点魟水下推进器,包括:一对胸鳍系统、主体和尾巴系统,所述胸鳍系统包括多个摆动结构、电机、偏心轮轴和转动主轴,所述摆动结构包括U形架和鳍条,所述鳍条固接在所述U形架上,所述U形架内设偏心轮,各偏心轮固定在偏心轮轴上,所述U形架还设有转动主轴孔,所述U形架可围绕所述转动主轴转动;所述主体前部连接有头部结构,所述头部结构前侧具有两个仿生凹槽,所述凹槽位置安装有传感器。本发明按照功能仿生的思路研制具有类似仿生对象的运动特征从而实现真正神似的仿生效果;同时基于该结构,实现了观测功能。

一种仿生波动长鳍水下推进器.pdf
本发明涉及一种仿生波动长鳍水下推进器包括:上下半筒、密封圈、螺丝孔、气门嘴芯、防水插头、第一锥齿轮、多个鳍条、长鳍、控制电路板、第一、第二舵机、压条、第一轴承座、配重块、丝杆、螺丝孔、电池组件,以及多路第一舵机动力输出结构由一长轴、鳍条座、第二轴承座、轴套、聚四氟乙烯圈、格来圈、滚珠轴承、第二锥齿轮组成;上半筒、下半筒和密封圈连接并压紧构成一个密封腔体,长鳍设置于圆筒形腔体下部,长鳍上具有多根鳍条,所有鳍条等间距分布在长鳍的鳍面上。每根鳍条通过第一锥齿轮、第二锥齿轮连接一个第一舵机单独驱动,长鳍鳍面是乳胶
一种摆动装置、水下仿生推进器及其应用.pdf
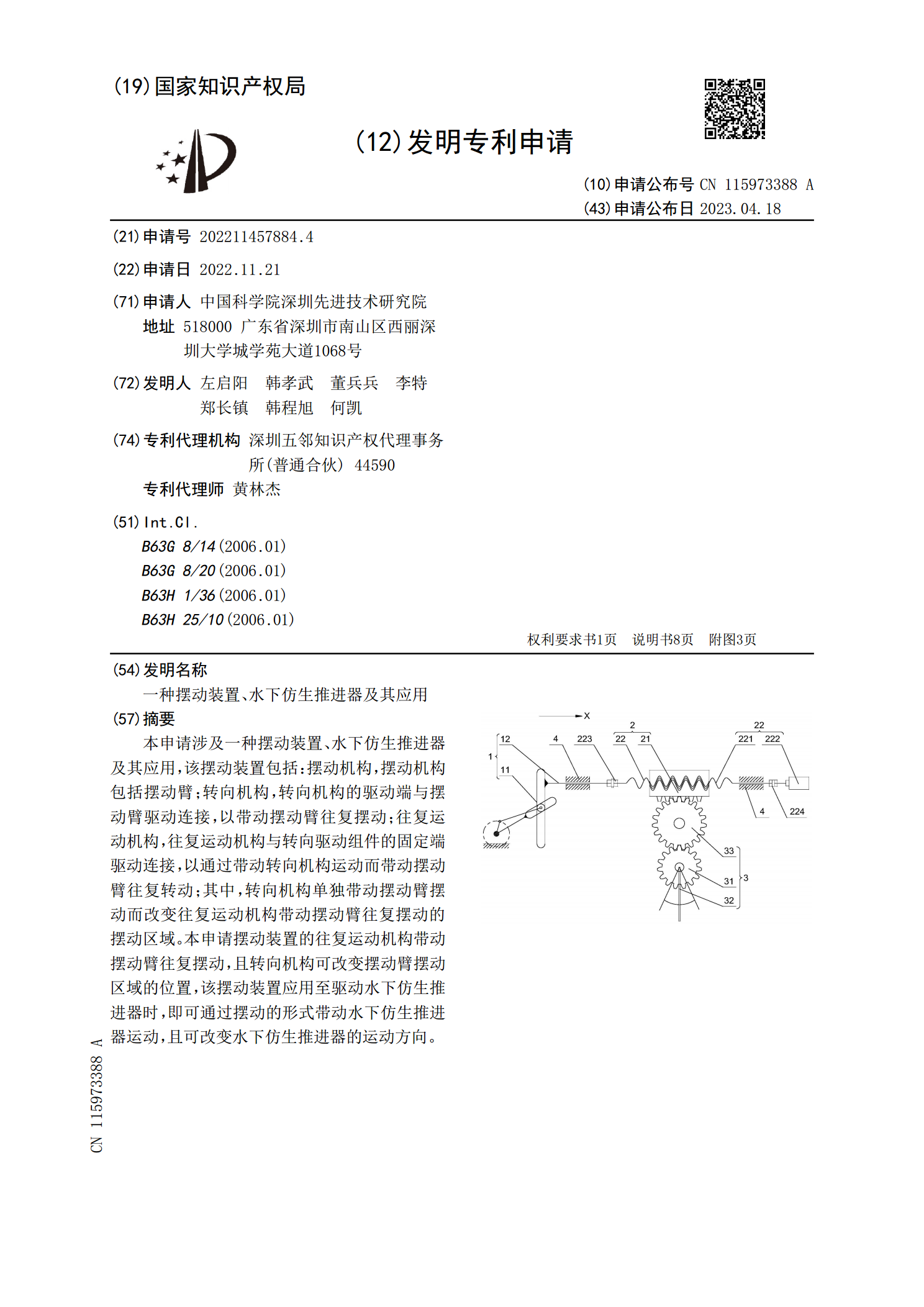
本申请涉及一种摆动装置、水下仿生推进器及其应用,该摆动装置包括:摆动机构,摆动机构包括摆动臂;转向机构,转向机构的驱动端与摆动臂驱动连接,以带动摆动臂往复摆动;往复运动机构,往复运动机构与转向驱动组件的固定端驱动连接,以通过带动转向机构运动而带动摆动臂往复转动;其中,转向机构单独带动摆动臂摆动而改变往复运动机构带动摆动臂往复摆动的摆动区域。本申请摆动装置的往复运动机构带动摆动臂往复摆动,且转向机构可改变摆动臂摆动区域的位置,该摆动装置应用至驱动水下仿生推进器时,即可通过摆动的形式带动水下仿生推进器运动,且
一种水下机械式仿生扑翼推进器.pdf
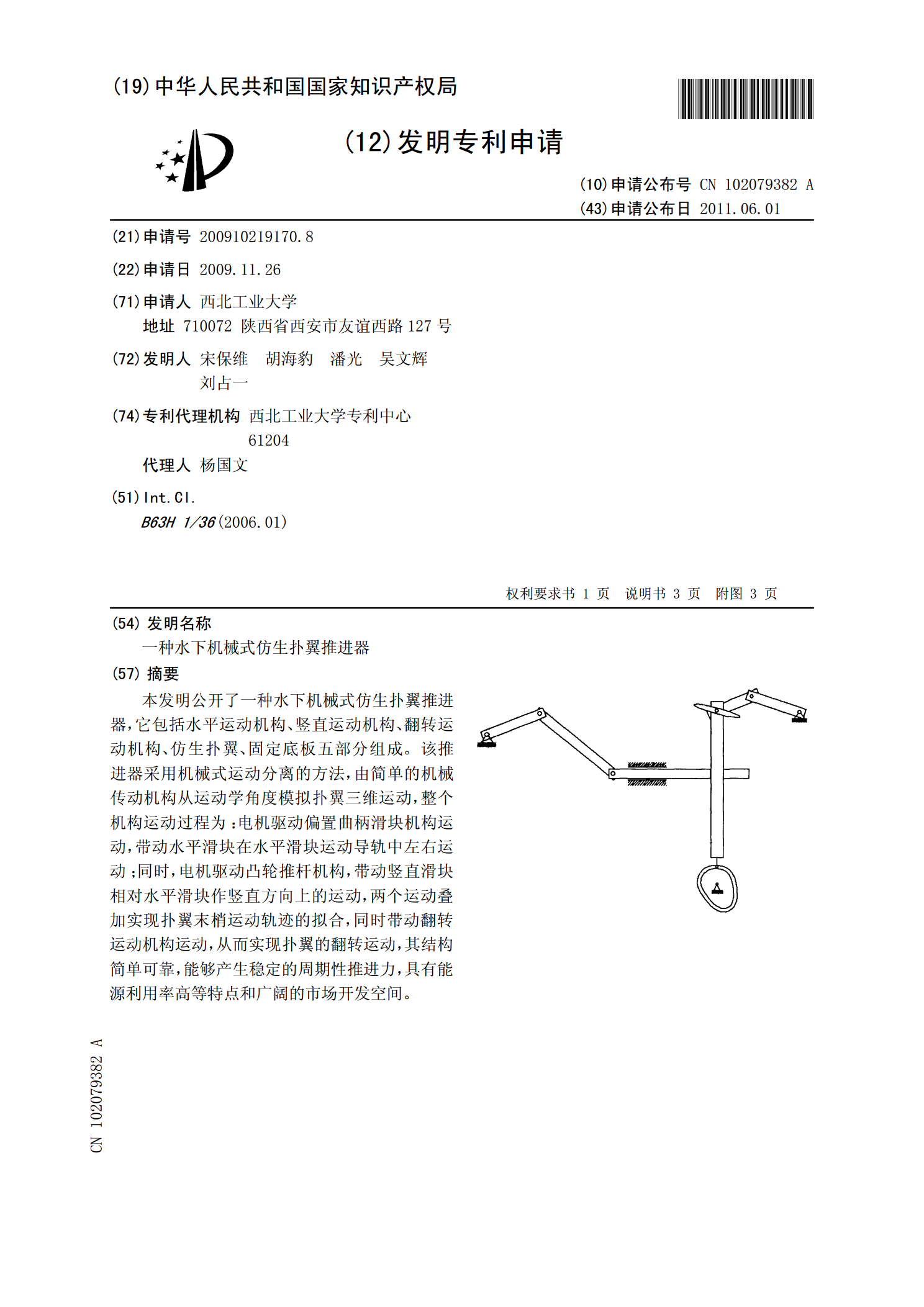
本发明公开了一种水下机械式仿生扑翼推进器,它包括水平运动机构、竖直运动机构、翻转运动机构、仿生扑翼、固定底板五部分组成。该推进器采用机械式运动分离的方法,由简单的机械传动机构从运动学角度模拟扑翼三维运动,整个机构运动过程为:电机驱动偏置曲柄滑块机构运动,带动水平滑块在水平滑块运动导轨中左右运动;同时,电机驱动凸轮推杆机构,带动竖直滑块相对水平滑块作竖直方向上的运动,两个运动叠加实现扑翼末梢运动轨迹的拟合,同时带动翻转运动机构运动,从而实现扑翼的翻转运动,其结构简单可靠,能够产生稳定的周期性推进力,具有能源

基于主动变形的水下仿生推进器推进性能研究.docx
基于主动变形的水下仿生推进器推进性能研究基于主动变形的水下仿生推进器推进性能研究摘要水下机器人的发展对于水下任务的执行具有重要意义,而水下推进器作为水下机器人中最重要的组成部分之一,其推进性能的研究对于提高水下机器人的操控能力和运动效率具有重要意义。本文针对水下推进器的推进性能展开研究,引入主动变形的思想,通过分析仿生学原理,提出了一种基于主动变形的水下仿生推进器,并利用数值模拟方法进行性能评估。研究结果表明,基于主动变形的水下仿生推进器在提高水下机器人操控性能和运动效率方面具有很大潜力。关键词:水下机器