
一种仿生波动长鳍水下推进器.pdf

是雁****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种仿生波动长鳍水下推进器.pdf
本发明涉及一种仿生波动长鳍水下推进器包括:上下半筒、密封圈、螺丝孔、气门嘴芯、防水插头、第一锥齿轮、多个鳍条、长鳍、控制电路板、第一、第二舵机、压条、第一轴承座、配重块、丝杆、螺丝孔、电池组件,以及多路第一舵机动力输出结构由一长轴、鳍条座、第二轴承座、轴套、聚四氟乙烯圈、格来圈、滚珠轴承、第二锥齿轮组成;上半筒、下半筒和密封圈连接并压紧构成一个密封腔体,长鳍设置于圆筒形腔体下部,长鳍上具有多根鳍条,所有鳍条等间距分布在长鳍的鳍面上。每根鳍条通过第一锥齿轮、第二锥齿轮连接一个第一舵机单独驱动,长鳍鳍面是乳胶
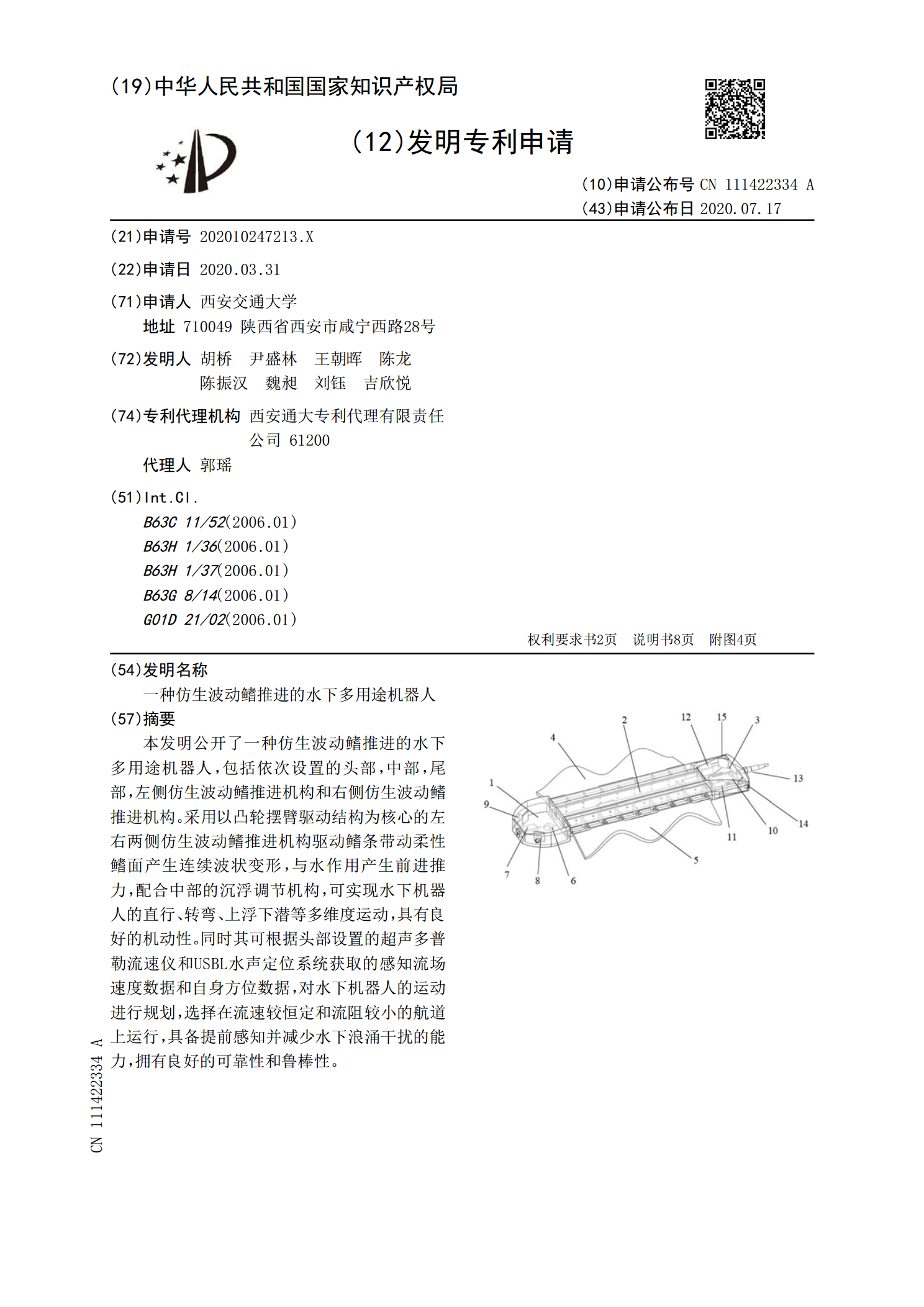
一种仿生波动鳍推进的水下多用途机器人.pdf
本发明公开了一种仿生波动鳍推进的水下多用途机器人,包括依次设置的头部,中部,尾部,左侧仿生波动鳍推进机构和右侧仿生波动鳍推进机构。采用以凸轮摆臂驱动结构为核心的左右两侧仿生波动鳍推进机构驱动鳍条带动柔性鳍面产生连续波状变形,与水作用产生前进推力,配合中部的沉浮调节机构,可实现水下机器人的直行、转弯、上浮下潜等多维度运动,具有良好的机动性。同时其可根据头部设置的超声多普勒流速仪和USBL水声定位系统获取的感知流场速度数据和自身方位数据,对水下机器人的运动进行规划,选择在流速较恒定和流阻较小的航道上运行,具备

一种柔性波动鳍仿生潜器.pdf
本发明属于两栖推进器技术领域,具体涉及一种柔性波动鳍仿生潜器。本发明采用仿生波动鳍的结构,仿生来源自鳐鱼、深海带鱼的波动鳍相结合,材料采用高弹硅胶,具有较高的延展性,该推进系统具有操纵性优异、水动力噪声低、易于仿生改造、地形通过性强、可在限制航道工作等海洋作业特点。本发明的机械结构采用舵机‑连杆‑仿生波动鳍连接方式,舵机侧面固定在仿生推进器主体部分预留的厚度结构上,通过多个舵机摆动幅度和转向驱动可控制波动鳍摆动,实现转向、加速、上浮、下沉及制动等功能,更能适应复杂的水底环境。

基于柔性鳍波动的水下仿生系统推进性能研究的任务书.docx
基于柔性鳍波动的水下仿生系统推进性能研究的任务书任务书:基于柔性鳍波动的水下仿生系统推进性能研究一、研究背景和意义随着人类对深海环境的探索和利用不断深入,水下仿生技术作为一种能够有效模拟水下动物运动特性的技术手段,对于设计和制造高性能水下航行器具有重要的参考价值。传统的推进系统往往存在着噪声、振动、能耗大等问题,限制了水下航行器的性能和应用范围。而基于柔性鳍波动的水下仿生系统作为一种新颖的推进方式,具有结构简单、效率高、噪声低等优点,能够有效提升水下航行器的推进性能。本研究旨在通过对基于柔性鳍波动的水下仿
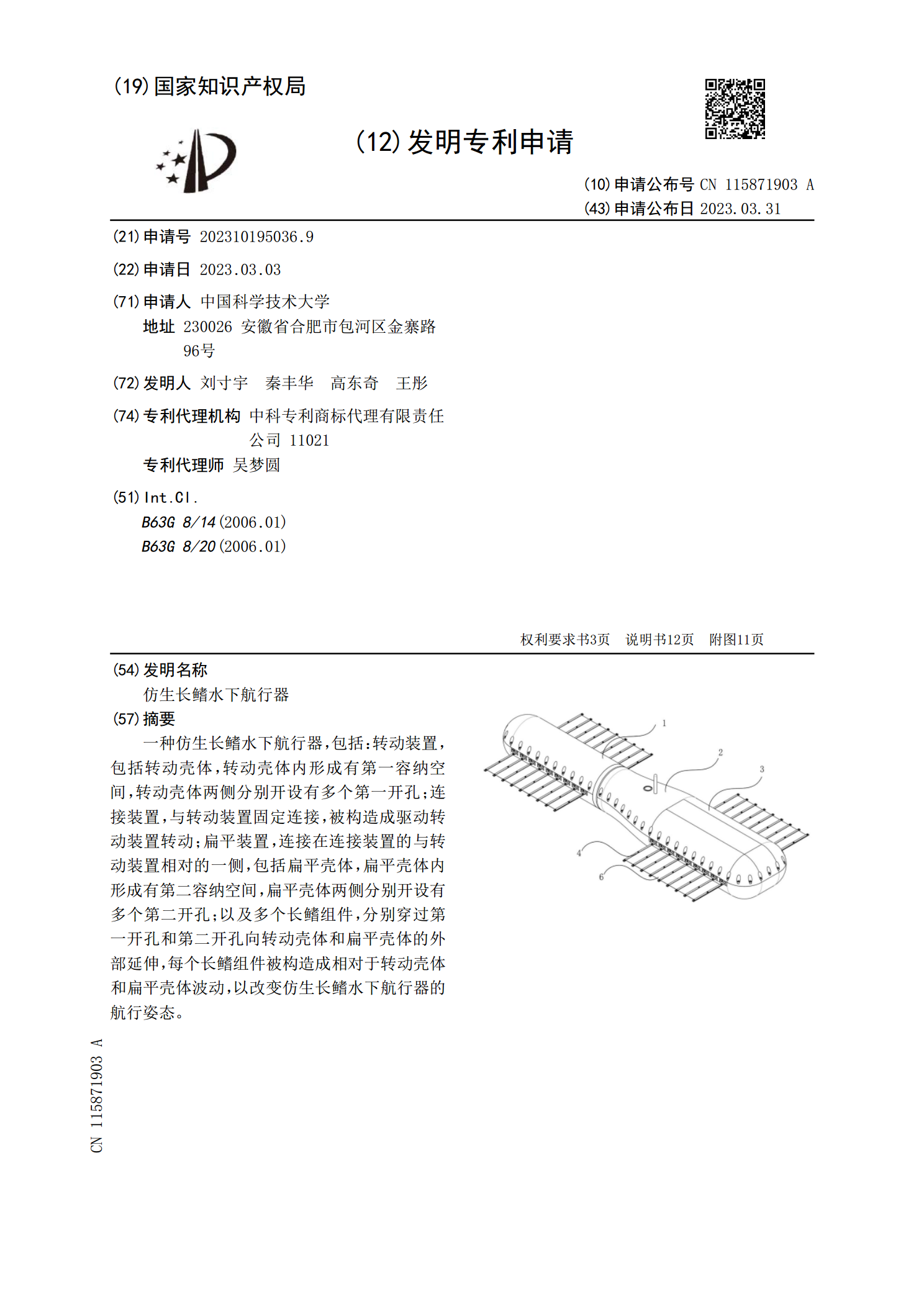
仿生长鳍水下航行器.pdf
一种仿生长鳍水下航行器,包括:转动装置,包括转动壳体,转动壳体内形成有第一容纳空间,转动壳体两侧分别开设有多个第一开孔;连接装置,与转动装置固定连接,被构造成驱动转动装置转动;扁平装置,连接在连接装置的与转动装置相对的一侧,包括扁平壳体,扁平壳体内形成有第二容纳空间,扁平壳体两侧分别开设有多个第二开孔;以及多个长鳍组件,分别穿过第一开孔和第二开孔向转动壳体和扁平壳体的外部延伸,每个长鳍组件被构造成相对于转动壳体和扁平壳体波动,以改变仿生长鳍水下航行器的航行姿态。