
基于主动变形的水下仿生推进器推进性能研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于主动变形的水下仿生推进器推进性能研究.docx
基于主动变形的水下仿生推进器推进性能研究基于主动变形的水下仿生推进器推进性能研究摘要水下机器人的发展对于水下任务的执行具有重要意义,而水下推进器作为水下机器人中最重要的组成部分之一,其推进性能的研究对于提高水下机器人的操控能力和运动效率具有重要意义。本文针对水下推进器的推进性能展开研究,引入主动变形的思想,通过分析仿生学原理,提出了一种基于主动变形的水下仿生推进器,并利用数值模拟方法进行性能评估。研究结果表明,基于主动变形的水下仿生推进器在提高水下机器人操控性能和运动效率方面具有很大潜力。关键词:水下机器

基于主动变形的水下仿生推进器推进性能研究的开题报告.docx
基于主动变形的水下仿生推进器推进性能研究的开题报告一、研究背景水下机器人在深海勘探、海底管线监测、生物学研究等领域得到了广泛的应用。水下推进器是水下机器人的重要部分,影响着机器人的航行性能。目前,水下推进器通常是采用螺旋桨、舵叶等传统推进方式,其推进效率和机动性有限。仿生学应用于水下机器人中,可以提高机器人的行进速度和机动性。由于水下生物进化环境的复杂性,水下生物在演化过程中形成了许多独特的身体形态和运动方式,研究其特征可以启发我们设计更优秀的水下机器人。近年来,研究人员开始运用主动变形技术来设计水下机器

基于柔性鳍波动的水下仿生系统推进性能研究的任务书.docx
基于柔性鳍波动的水下仿生系统推进性能研究的任务书任务书:基于柔性鳍波动的水下仿生系统推进性能研究一、研究背景和意义随着人类对深海环境的探索和利用不断深入,水下仿生技术作为一种能够有效模拟水下动物运动特性的技术手段,对于设计和制造高性能水下航行器具有重要的参考价值。传统的推进系统往往存在着噪声、振动、能耗大等问题,限制了水下航行器的性能和应用范围。而基于柔性鳍波动的水下仿生系统作为一种新颖的推进方式,具有结构简单、效率高、噪声低等优点,能够有效提升水下航行器的推进性能。本研究旨在通过对基于柔性鳍波动的水下仿
一种仿生蓝点魟水下推进器.pdf
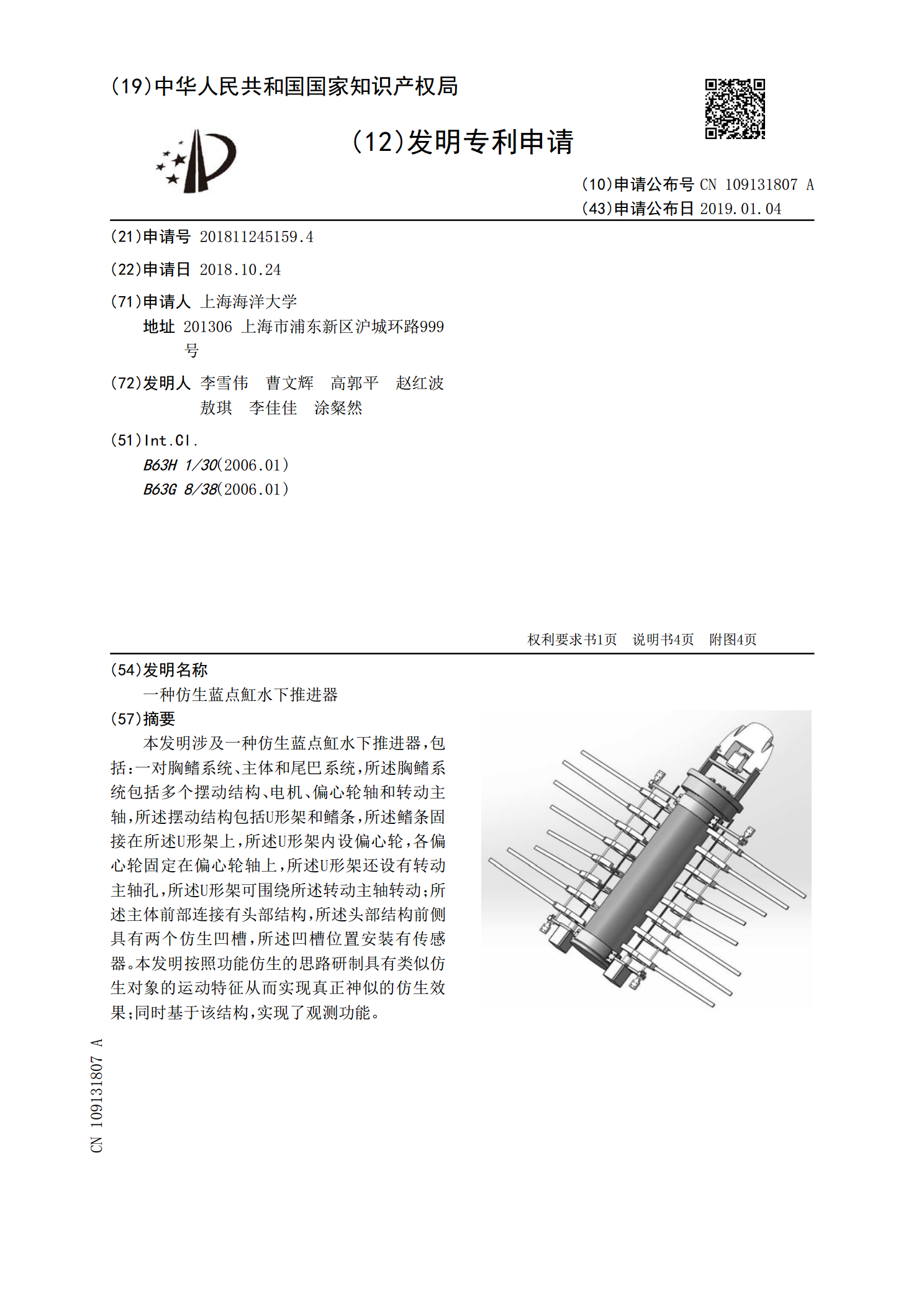
本发明涉及一种仿生蓝点魟水下推进器,包括:一对胸鳍系统、主体和尾巴系统,所述胸鳍系统包括多个摆动结构、电机、偏心轮轴和转动主轴,所述摆动结构包括U形架和鳍条,所述鳍条固接在所述U形架上,所述U形架内设偏心轮,各偏心轮固定在偏心轮轴上,所述U形架还设有转动主轴孔,所述U形架可围绕所述转动主轴转动;所述主体前部连接有头部结构,所述头部结构前侧具有两个仿生凹槽,所述凹槽位置安装有传感器。本发明按照功能仿生的思路研制具有类似仿生对象的运动特征从而实现真正神似的仿生效果;同时基于该结构,实现了观测功能。

基于半转机构的仿生船舶推进器的仿真研究.docx
基于半转机构的仿生船舶推进器的仿真研究随着船舶工业的不断发展,推进器的性能和效率也成为船舶设计的重要指标之一。而在仿生学的启发下,研发仿生船舶推进器已成为当前船舶工业的研究热点。本文将重点研究基于半转机构的仿生船舶推进器。一、半转机构的原理半转机构又称奥托利波(Ottolip)机构,是近年来应用研究最为成熟的转化运动于旋转运动的机构之一。半转机构基本原理是通过一个外形奇特的过渡环,在一定角度范围内可以实现输入的平移运动转化为输出的旋转运动。二、基于半转机构的仿生船舶推进器传统的船舶推进器往往采用螺旋桨的结