
一种线控四轮转向汽车及其控制方法.pdf

是飞****文章

1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多模式线控转向汽车及其转向控制方法.pdf
本发明公开了一种多模式线控转向汽车的转向控制方法,包括:当驾驶员切换转向模式时,转向控制器以当前转向模式、驾驶员切换的转向模式、切换时方向盘转角、切换时轮速为依据判断出满足模式切换的条件时,发出切换模式的触发信号;转向控制器根据切换后转向模式、切换后方向盘转角、切换后轮速以及切换后车轮转角信息计算目标车轮转角和转矩,并发送给车辆控制器和转向电机控制器,控制轮毂电机和转向电机工作,实现转向。通过单独的转向模式或者不同转向模式间的组合和切换控制,可以实现车辆更为灵活的变道超车、路边侧方停车等功能。

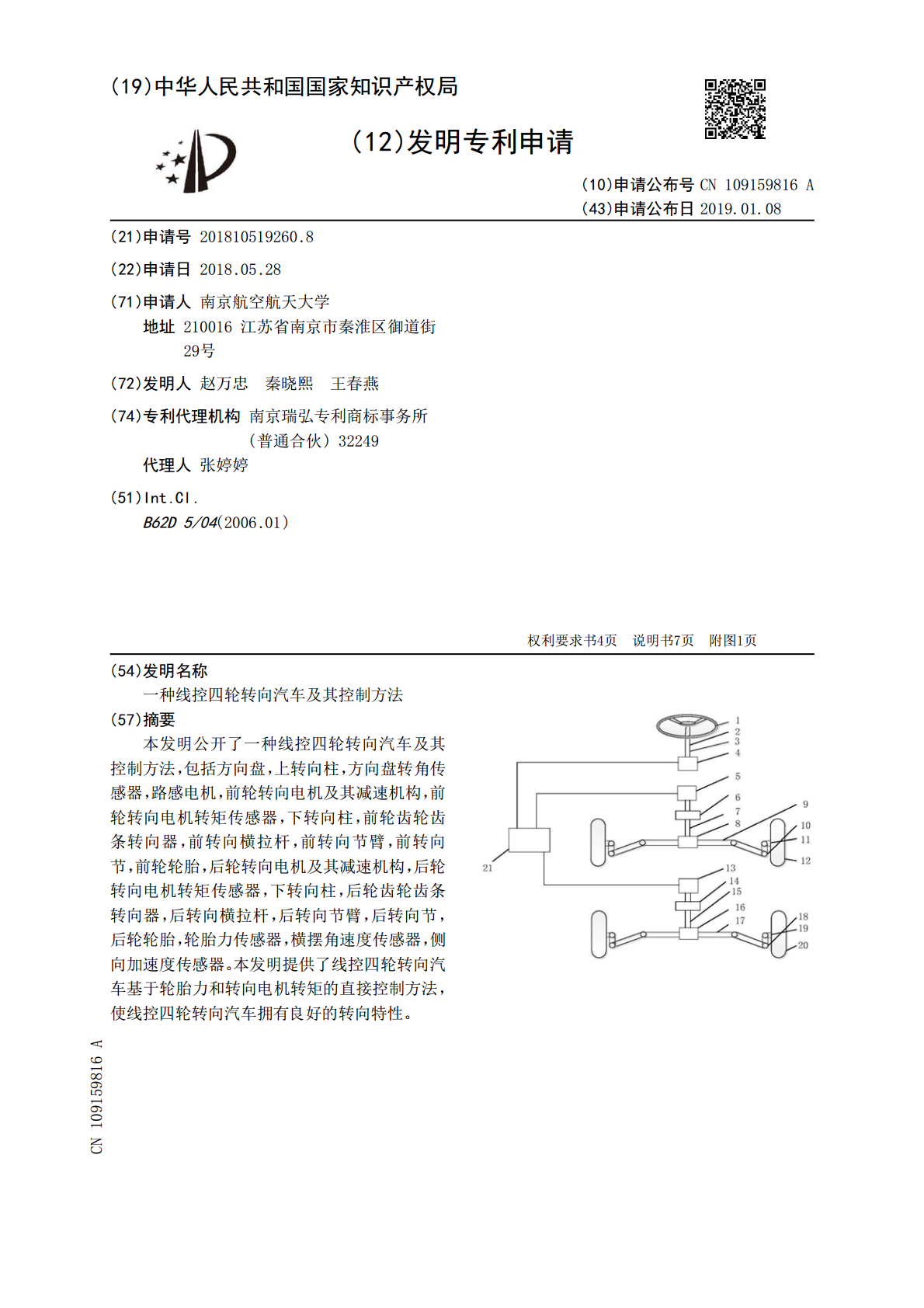
一种线控四轮转向汽车及其控制方法.pdf
本发明公开了一种线控四轮转向汽车及其控制方法,包括方向盘,上转向柱,方向盘转角传感器,路感电机,前轮转向电机及其减速机构,前轮转向电机转矩传感器,下转向柱,前轮齿轮齿条转向器,前转向横拉杆,前转向节臂,前转向节,前轮轮胎,后轮转向电机及其减速机构,后轮转向电机转矩传感器,下转向柱,后轮齿轮齿条转向器,后转向横拉杆,后转向节臂,后转向节,后轮轮胎,轮胎力传感器,横摆角速度传感器,侧向加速度传感器。本发明提供了线控四轮转向汽车基于轮胎力和转向电机转矩的直接控制方法,使线控四轮转向汽车拥有良好的转向特性。
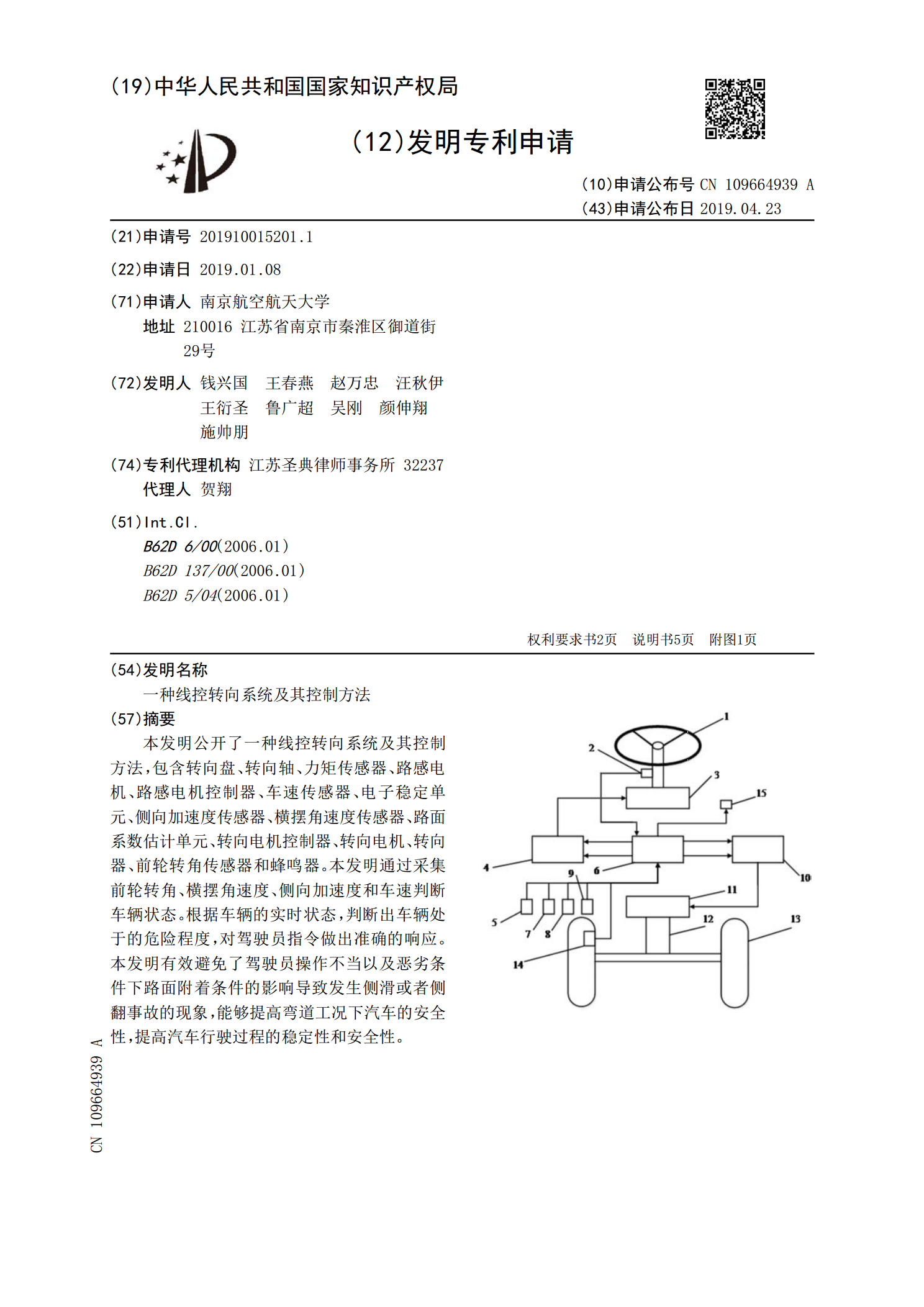
一种线控转向系统及其控制方法.pdf
本发明公开了一种线控转向系统及其控制方法,包含转向盘、转向轴、力矩传感器、路感电机、路感电机控制器、车速传感器、电子稳定单元、侧向加速度传感器、横摆角速度传感器、路面系数估计单元、转向电机控制器、转向电机、转向器、前轮转角传感器和蜂鸣器。本发明通过采集前轮转角、横摆角速度、侧向加速度和车速判断车辆状态。根据车辆的实时状态,判断出车辆处于的危险程度,对驾驶员指令做出准确的响应。本发明有效避免了驾驶员操作不当以及恶劣条件下路面附着条件的影响导致发生侧滑或者侧翻事故的现象,能够提高弯道工况下汽车的安全性,提高汽

一种用于电动轮驱动汽车的线控转向机构及其控制方法.pdf
本发明公开了一种用于电动轮驱动汽车的线控转向机构,包括:电动轮,其同轴中心具有电机轴;转向节,其中心具有第一连接孔,所述第一连接孔内套设所述电机轴;凸起,其垂直设置在所述转向节上,所述凸起上设置第二连接孔;涡轮轴,其竖直固定在所述第二连接孔内;电机座,其设置在所述转向节上,与所述转向节能够相对转动;下横臂,其一端与车身连接,另一端与所述电机座铰接;转向电机,其设置在所述电机座上,所述转向电机的输出端设置蜗杆,所述蜗杆与所述涡轮轴啮合。本发明提供了一种用于电动轮驱动汽车的线控转向机构,采用电传连接,通过转向

用于汽车线控转向系统的控制方法.pdf
本发明公开了用于汽车线控转向系统的控制方法,步骤:1.线控转向系统初始化;2.检测转向盘的位置是否与转向车轮的位置相对应,如果不是,通过力感模拟电机调节转向盘转角至与小齿轮转角对应的目标转向盘位置;3.检测线控转向系统是否继续工作;4.转向系统及车辆状态采集处理;5.转向盘位置控制器与转向执行电机转矩控制器分别计算β和α;6.转向盘位置控制器根据θp与β计算相应的转向盘目标转角,转向执行电机转矩控制器则根据Ts与α计算转向执行电机的目标电流;7.转向盘位置控制器按照位置控制原理对力感模拟电机进行转角控制;