
智能型保姆机器人.pdf

纪阳****公主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共34页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能型保姆机器人.pdf
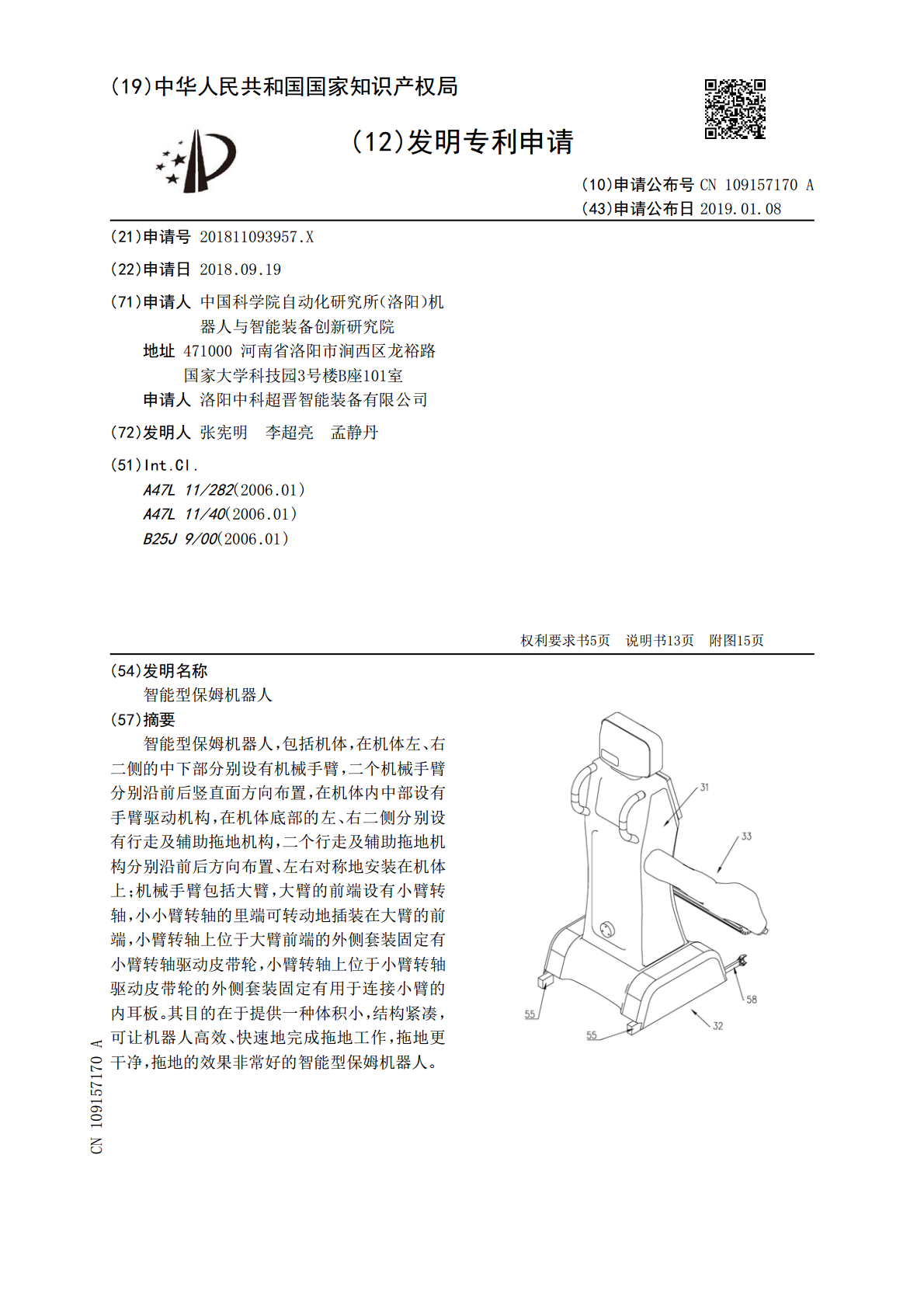
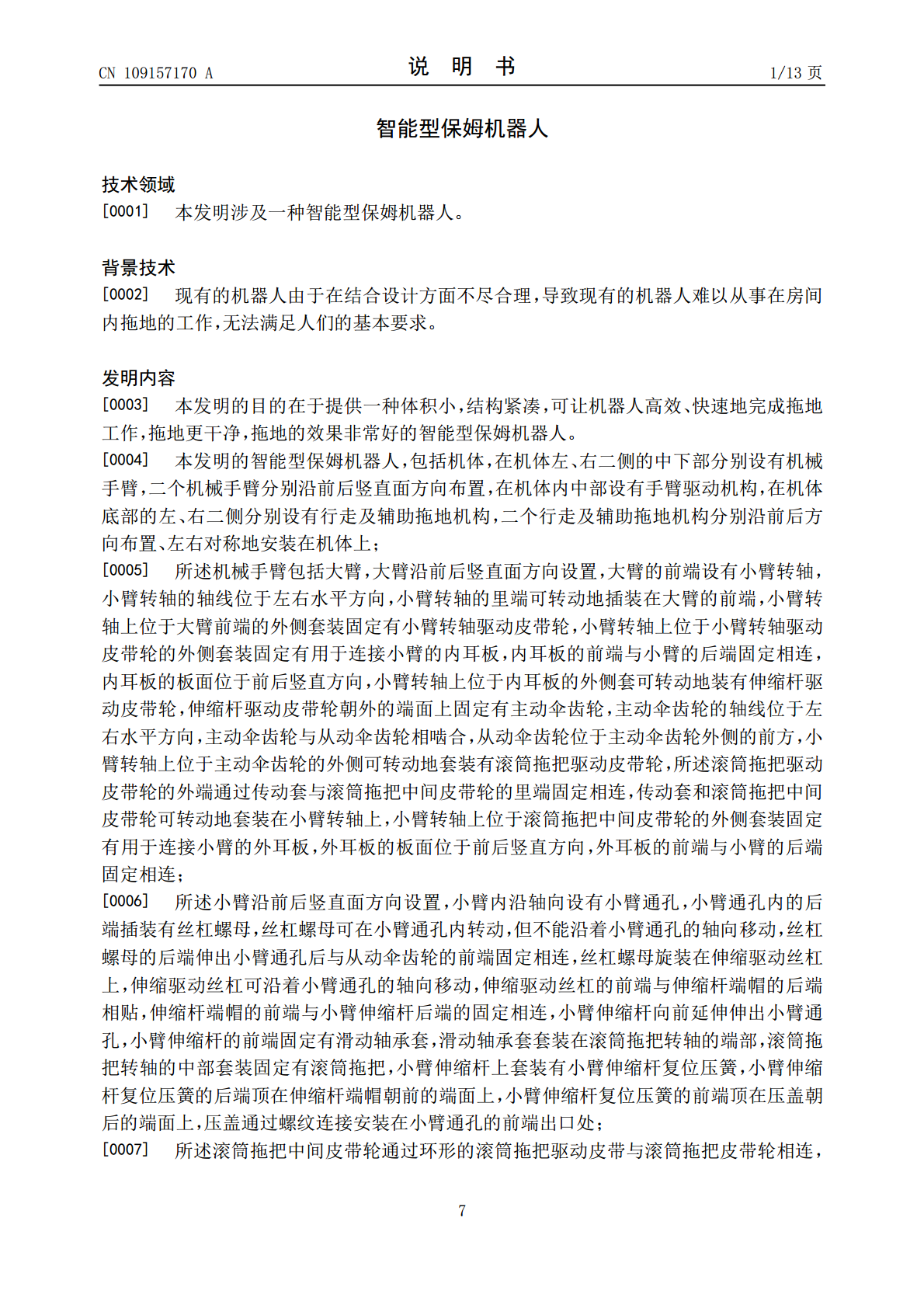
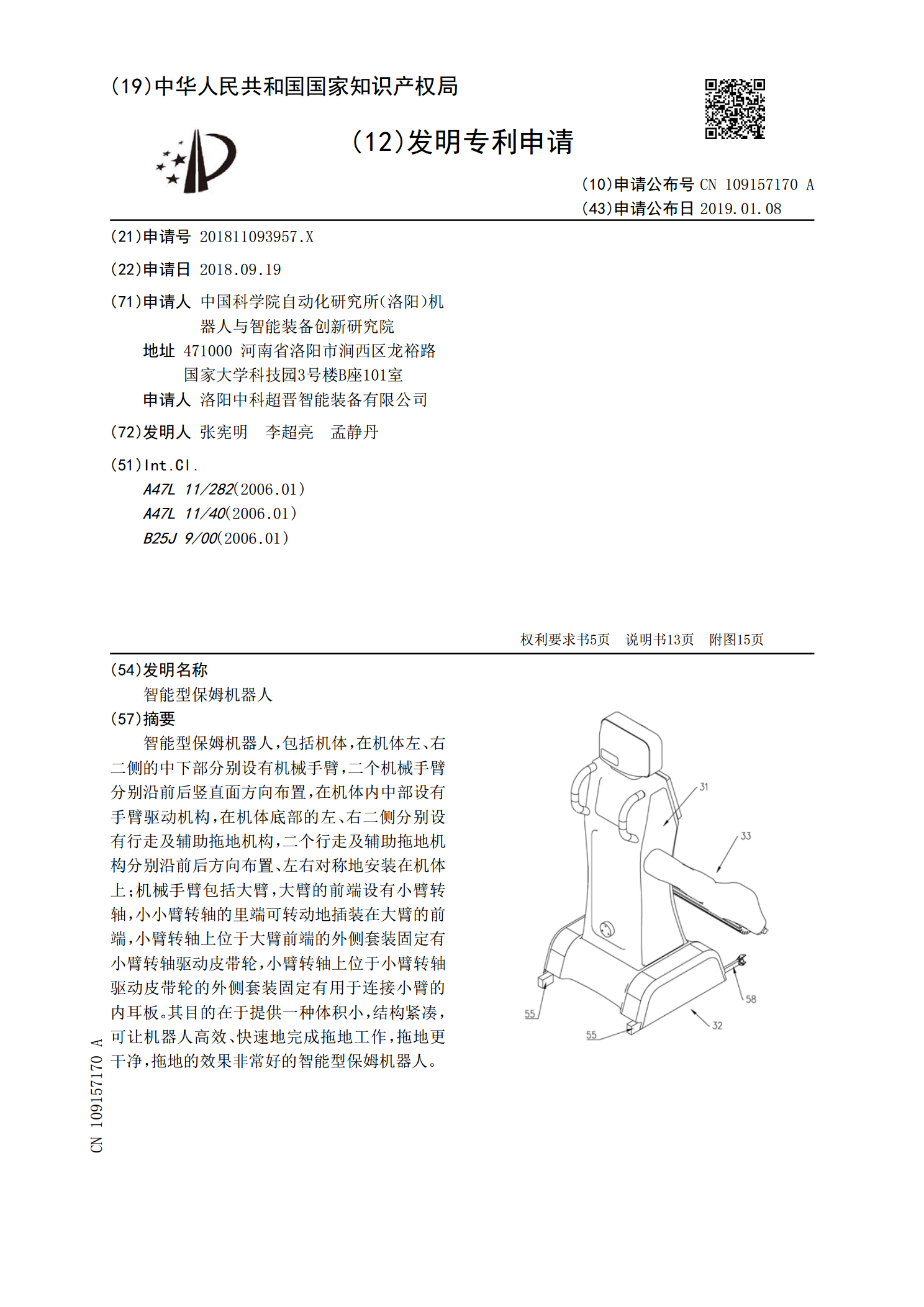
智能型保姆机器人,包括机体,在机体左、右二侧的中下部分别设有机械手臂,二个机械手臂分别沿前后竖直面方向布置,在机体内中部设有手臂驱动机构,在机体底部的左、右二侧分别设有行走及辅助拖地机构,二个行走及辅助拖地机构分别沿前后方向布置、左右对称地安装在机体上;机械手臂包括大臂,大臂的前端设有小臂转轴,小小臂转轴的里端可转动地插装在大臂的前端,小臂转轴上位于大臂前端的外侧套装固定有小臂转轴驱动皮带轮,小臂转轴上位于小臂转轴驱动皮带轮的外侧套装固定有用于连接小臂的内耳板。其目的在于提供一种体积小,结构紧凑,可让机器
智能型保姆机器人手臂.pdf
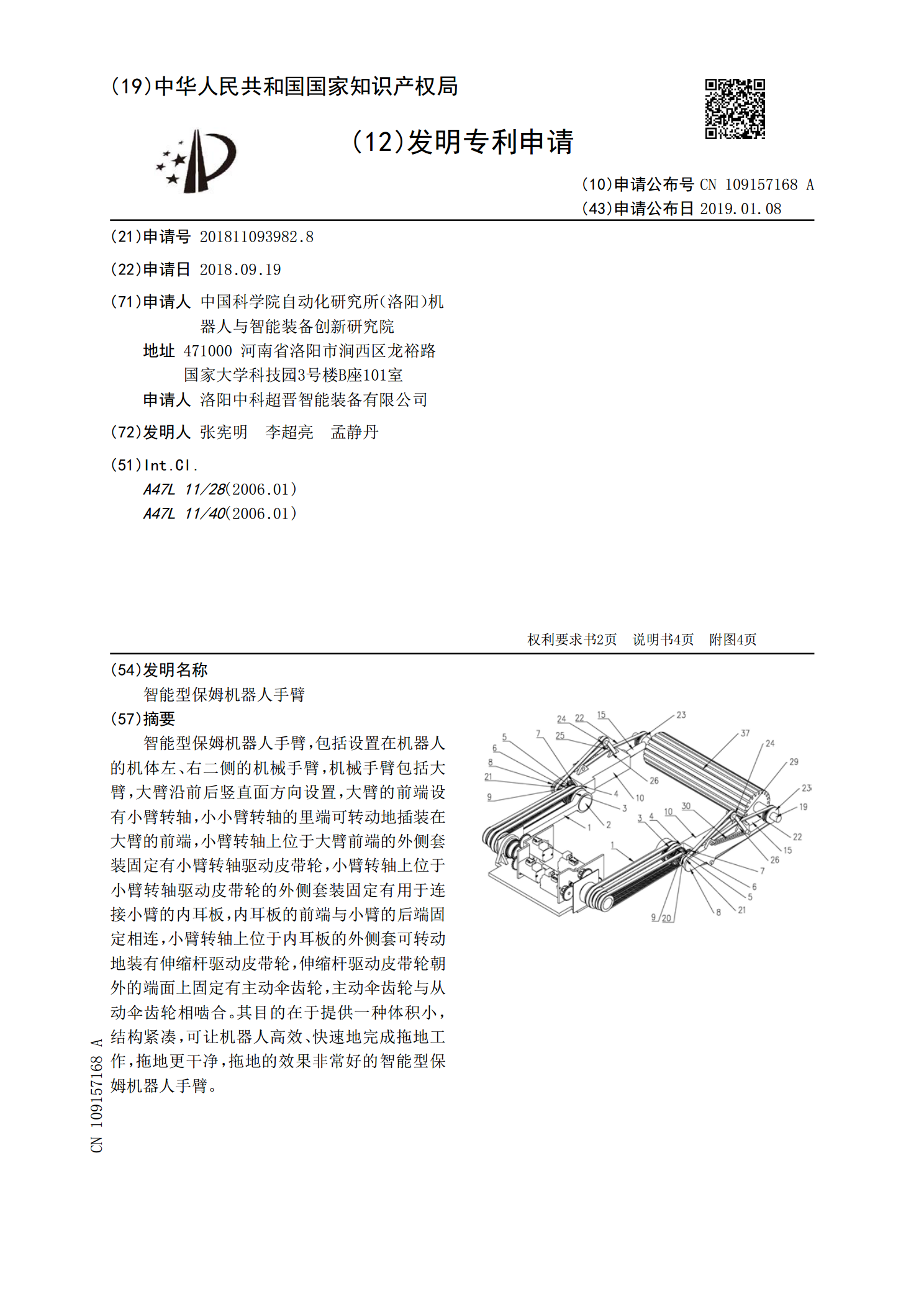
智能型保姆机器人手臂,包括设置在机器人的机体左、右二侧的机械手臂,机械手臂包括大臂,大臂沿前后竖直面方向设置,大臂的前端设有小臂转轴,小小臂转轴的里端可转动地插装在大臂的前端,小臂转轴上位于大臂前端的外侧套装固定有小臂转轴驱动皮带轮,小臂转轴上位于小臂转轴驱动皮带轮的外侧套装固定有用于连接小臂的内耳板,内耳板的前端与小臂的后端固定相连,小臂转轴上位于内耳板的外侧套可转动地装有伸缩杆驱动皮带轮,伸缩杆驱动皮带轮朝外的端面上固定有主动伞齿轮,主动伞齿轮与从动伞齿轮相啮合。其目的在于提供一种体积小,结构紧凑,可

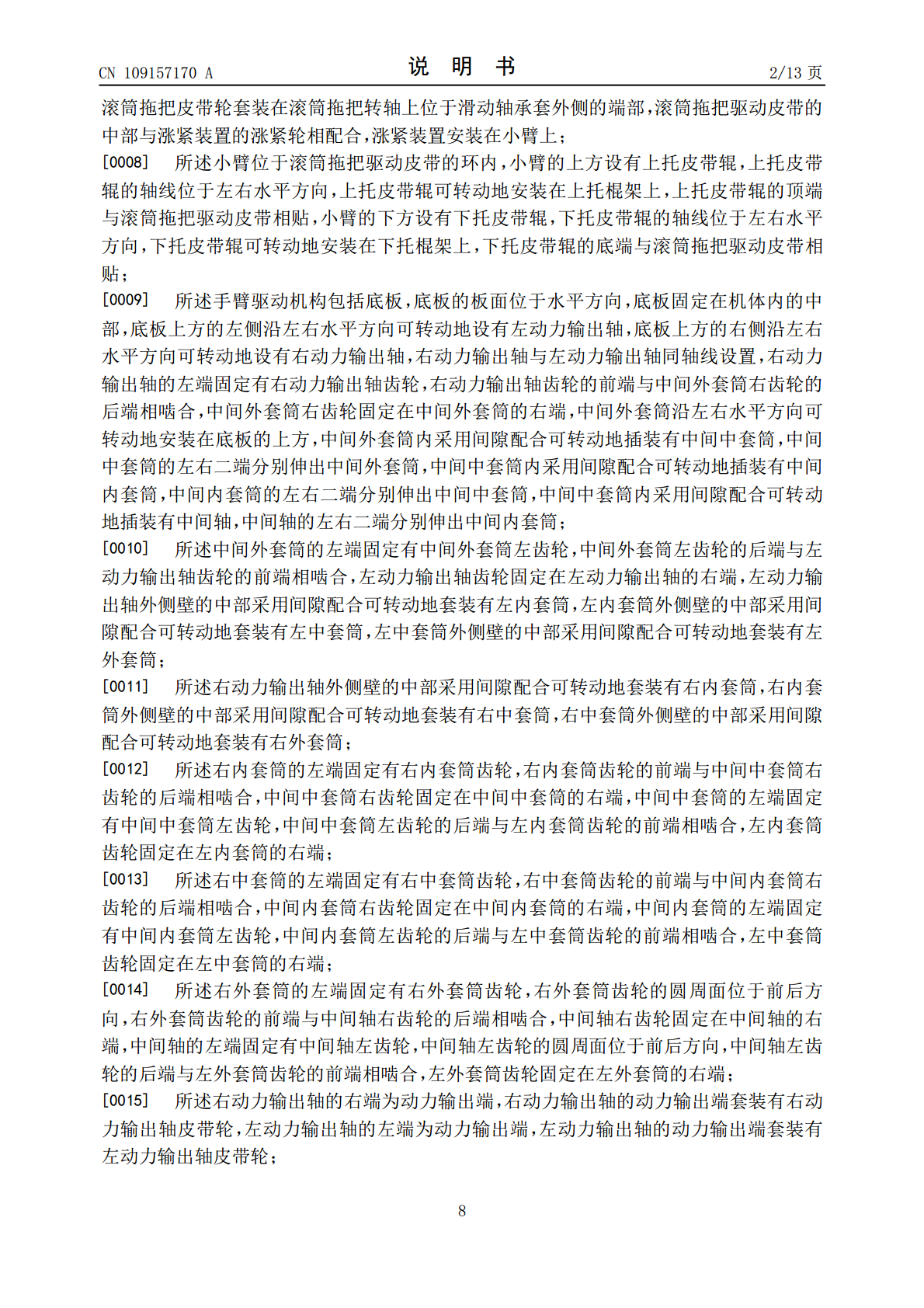
智能型保姆机器人手臂驱动机构.pdf
智能型保姆机器人手臂驱动机构,包括底板,底板上方的左侧沿左右水平方向可转动地设有左动力输出轴,底板上方的右侧沿左右水平方向可转动地设有右动力输出轴,右动力输出轴与左动力输出轴同轴线设置,右动力输出轴的左端固定有右动力输出轴齿轮,右动力输出轴齿轮的前端与中间外套筒右齿轮的后端相啮合,中间外套筒右齿轮固定在中间外套筒的右端,中间外套筒沿左右水平方向可转动地安装在底板的上方,中间外套筒内采用间隙配合可转动地插装有中间中套筒,中间中套筒的左右二端分别伸出中间外套筒。其目的在于提供一种体积小,结构紧凑,可让机器人高

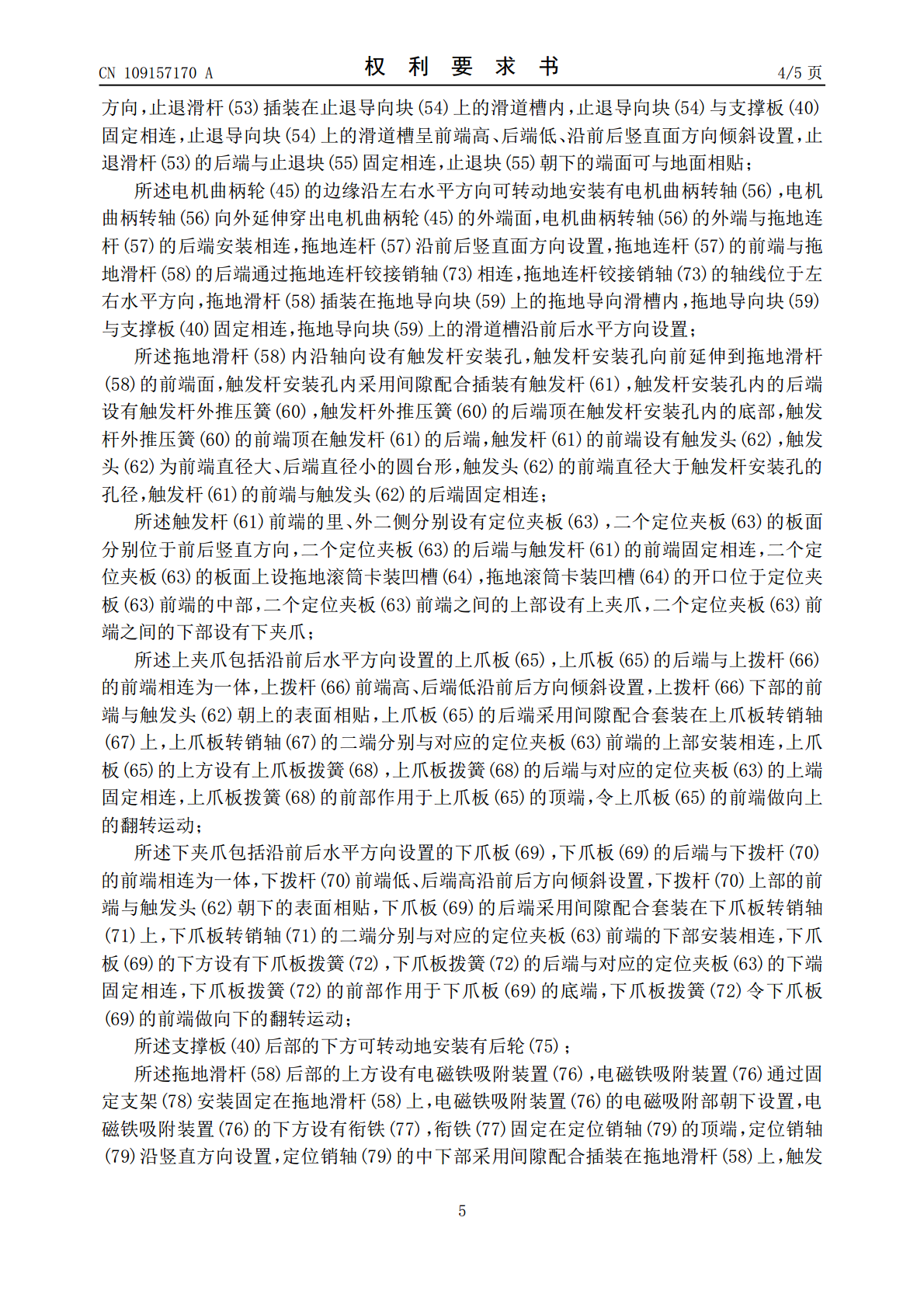
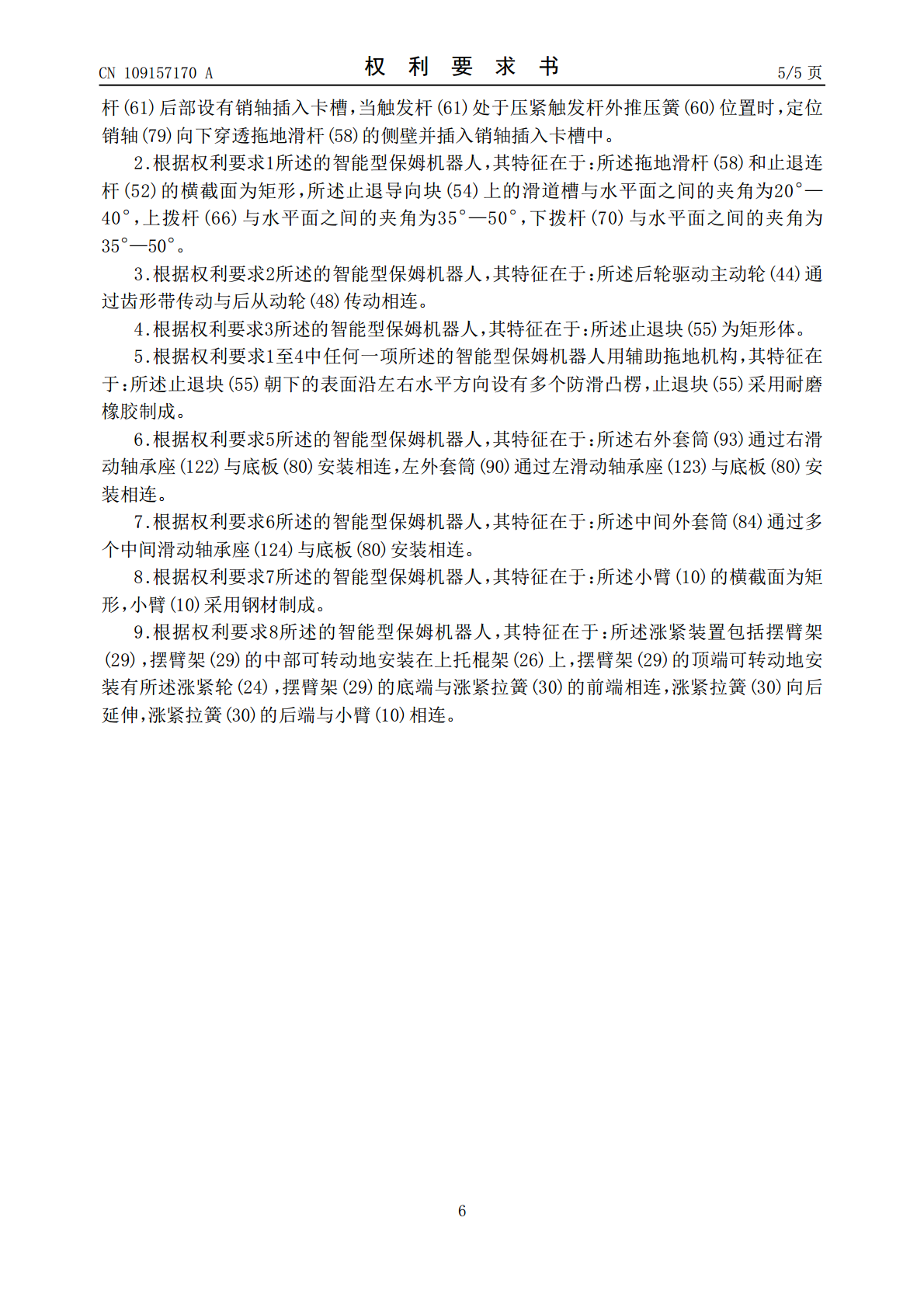
智能型保姆机器人用辅助拖地机构.pdf
智能型保姆机器人用辅助拖地机构,包括设置在机器人底部左、右二侧的行走及辅助拖地机构,二个行走及辅助拖地机构分别沿前后方向布置、左右对称地安装在机器人的机体上;行走及辅助拖地机构包括支撑板,支撑板与机器人的机体固定相连,支撑板里侧的中部设有电动机,电动机的壳体安装在支撑板上,支撑板外侧的中部设有驱动轴,驱动轴的里端可转动地安装在支撑板上,驱动轴的里端与电动机的电机轴传动相连,驱动轴上自里向外依次套装有后轮驱动主动轮和电机曲柄轮。其目的在于提供一种可让机器人高效、快速地完成工作,拖地更干净,拖地的效果非常好的

机器人保姆_.docx
机器人保姆_机器人保姆_500字机器人保姆_500字120xx年,我发明了一个“保姆”机器人,我不停地使唤她,可她从不抱怨,而是越干越好!每个人都不是一出生就会做所有事的,就如我发明的“保姆”机器人,因为我忘了把几个芯片入进去了,所以导致“保姆”有些事儿不会做,其中一件就是做饭。火这件事最令我头疼了,所以我书写教教它。一天,“保姆”充完电了,我便说:“喂,保姆!你做早餐去!”“是,我亲爱的女主人。”“保姆”说完就去了。我便偷偷地跟着她去看,“保姆”决定煎一个荷包蛋和烧一片培根,她先把一个鸡蛋打破,然后就放