
智能型保姆机器人手臂驱动机构.pdf

一条****丹淑

1/10

2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能型保姆机器人手臂驱动机构.pdf
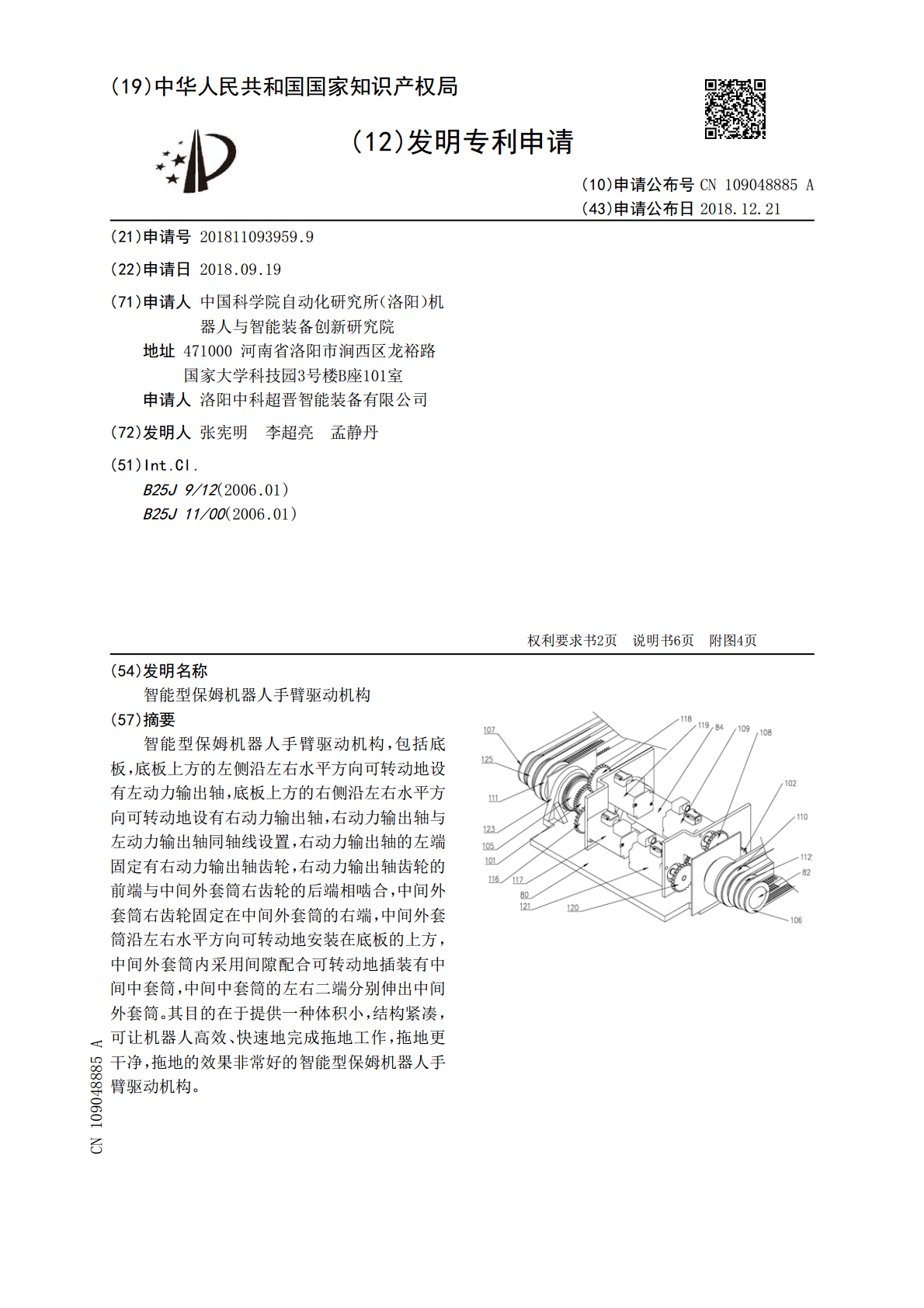
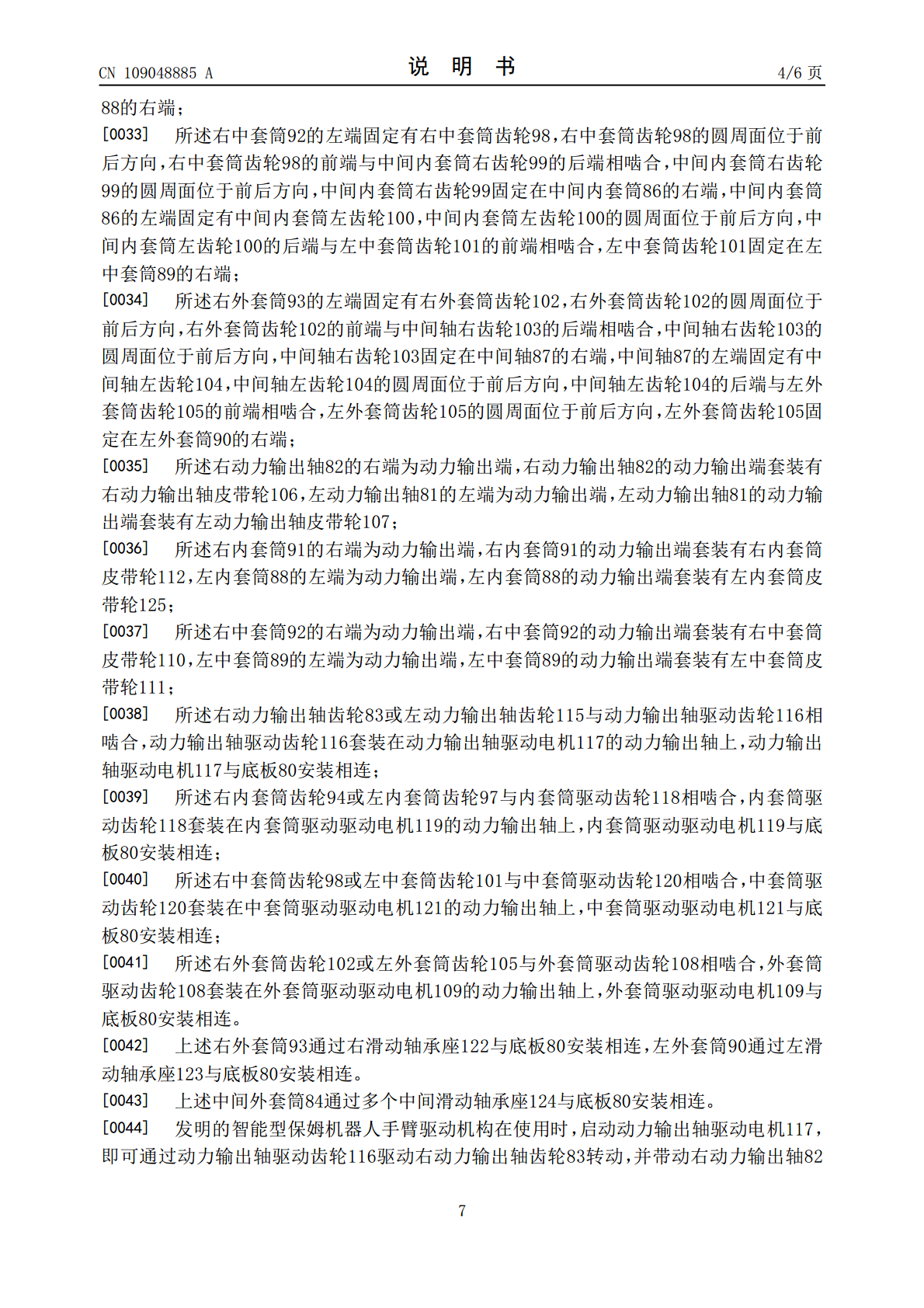
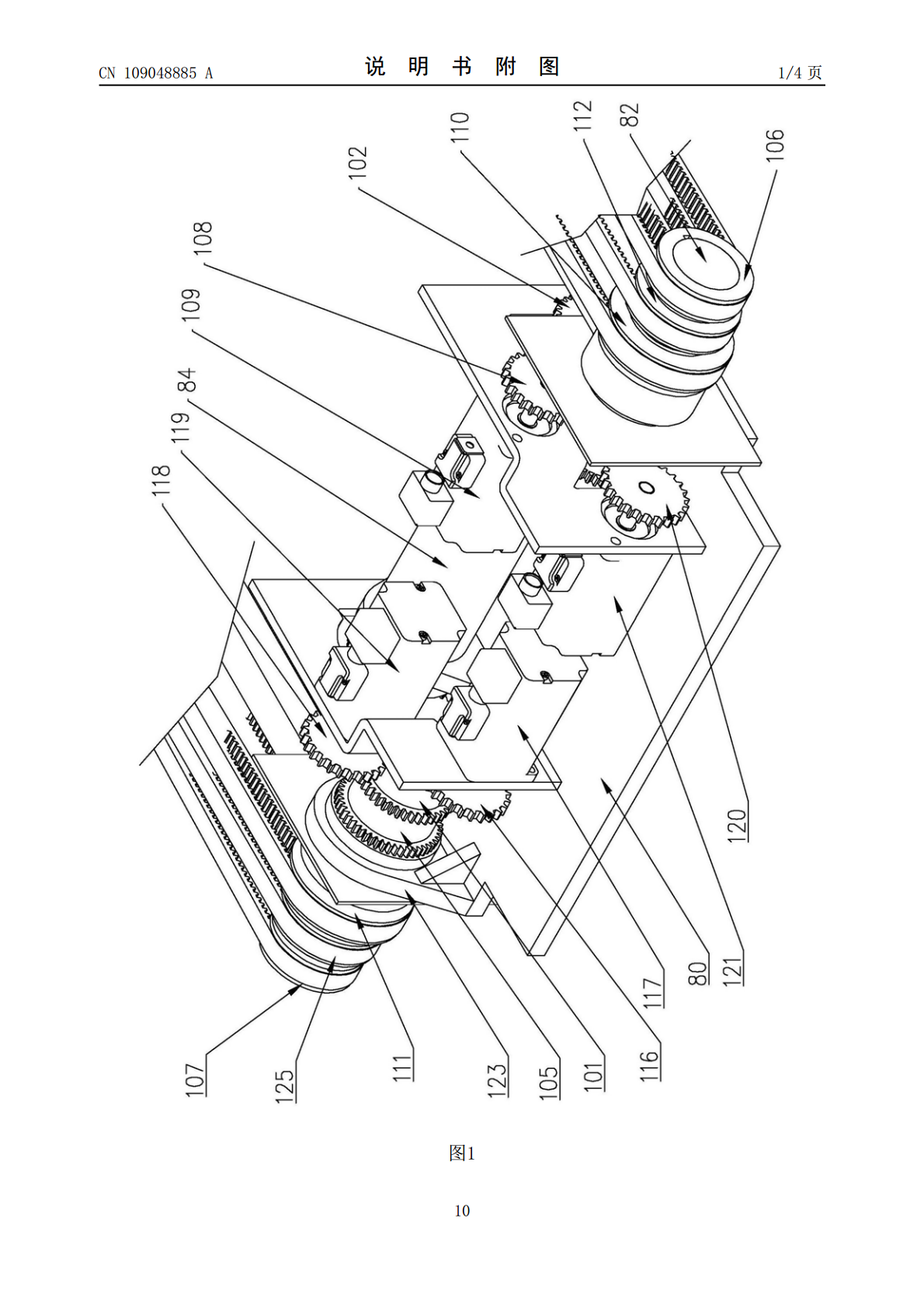
智能型保姆机器人手臂驱动机构,包括底板,底板上方的左侧沿左右水平方向可转动地设有左动力输出轴,底板上方的右侧沿左右水平方向可转动地设有右动力输出轴,右动力输出轴与左动力输出轴同轴线设置,右动力输出轴的左端固定有右动力输出轴齿轮,右动力输出轴齿轮的前端与中间外套筒右齿轮的后端相啮合,中间外套筒右齿轮固定在中间外套筒的右端,中间外套筒沿左右水平方向可转动地安装在底板的上方,中间外套筒内采用间隙配合可转动地插装有中间中套筒,中间中套筒的左右二端分别伸出中间外套筒。其目的在于提供一种体积小,结构紧凑,可让机器人高
智能型保姆机器人手臂.pdf
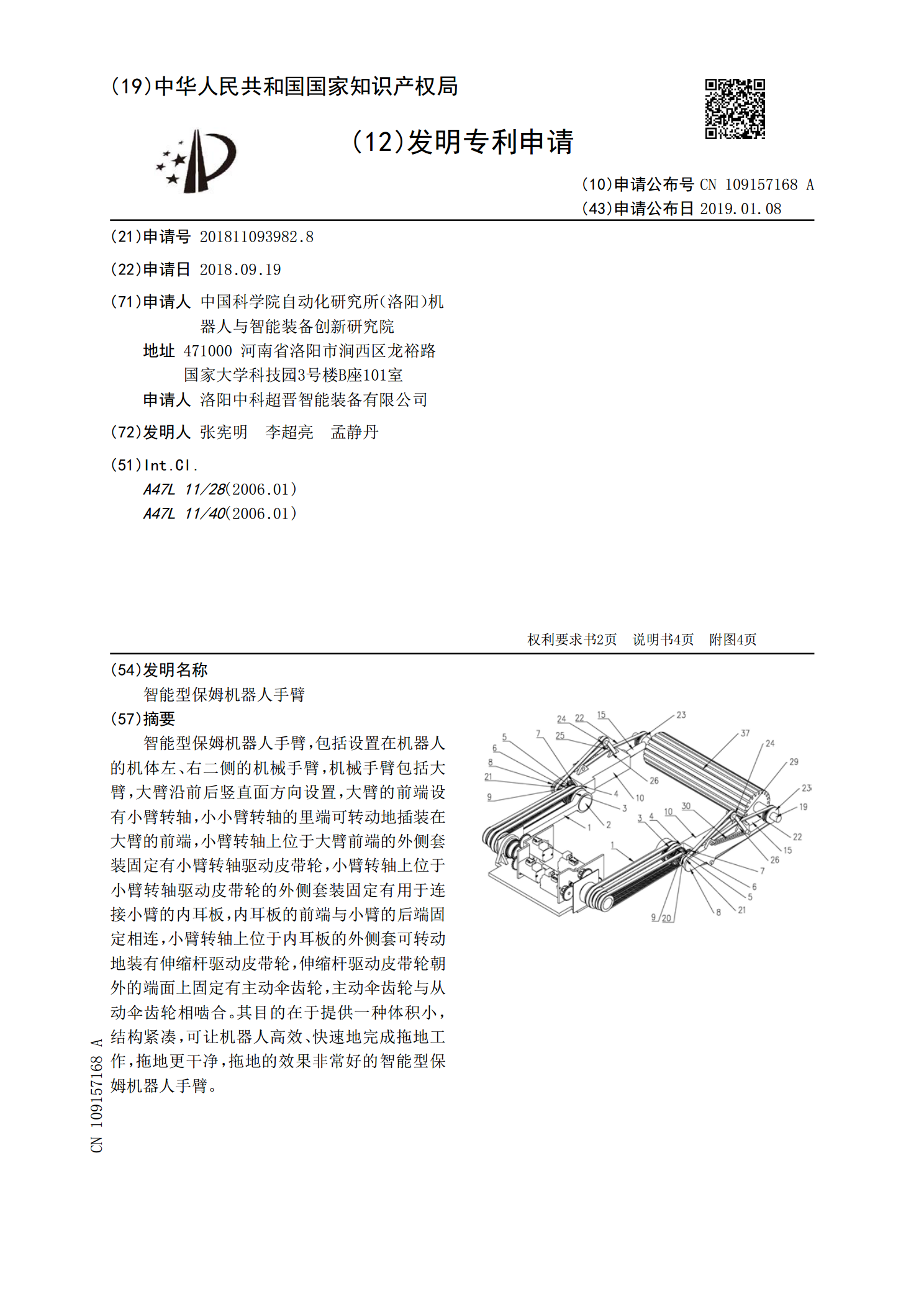
智能型保姆机器人手臂,包括设置在机器人的机体左、右二侧的机械手臂,机械手臂包括大臂,大臂沿前后竖直面方向设置,大臂的前端设有小臂转轴,小小臂转轴的里端可转动地插装在大臂的前端,小臂转轴上位于大臂前端的外侧套装固定有小臂转轴驱动皮带轮,小臂转轴上位于小臂转轴驱动皮带轮的外侧套装固定有用于连接小臂的内耳板,内耳板的前端与小臂的后端固定相连,小臂转轴上位于内耳板的外侧套可转动地装有伸缩杆驱动皮带轮,伸缩杆驱动皮带轮朝外的端面上固定有主动伞齿轮,主动伞齿轮与从动伞齿轮相啮合。其目的在于提供一种体积小,结构紧凑,可

机器人手臂的驱动机构.pdf
一种机械臂,含有关节机构,使得机械臂的一肢(310)与机械臂的另一肢(311)围绕两根不平行的旋转轴接合,该机构包括:一个中间托架(28),通过拥有纵摇转动轴(20)的第一转动关节与第一肢相连,通过拥有偏航转动轴(21)的第二转动关节与第二肢相连;第一传动齿轮(33),围绕纵摇转动轴,第一传动齿轮与托架固定;第二传动齿轮(37),围绕偏航转动轴,第二传动齿轮与第二臂固定;第一传动轴(26),驱动第一传动齿轮围绕纵摇转动轴旋转,第一传动轴沿第一肢延伸并在其上有第一轴齿轮(32),第一轴齿轮与第一传动齿轮齿合

智能型保姆机器人用辅助拖地机构.pdf
智能型保姆机器人用辅助拖地机构,包括设置在机器人底部左、右二侧的行走及辅助拖地机构,二个行走及辅助拖地机构分别沿前后方向布置、左右对称地安装在机器人的机体上;行走及辅助拖地机构包括支撑板,支撑板与机器人的机体固定相连,支撑板里侧的中部设有电动机,电动机的壳体安装在支撑板上,支撑板外侧的中部设有驱动轴,驱动轴的里端可转动地安装在支撑板上,驱动轴的里端与电动机的电机轴传动相连,驱动轴上自里向外依次套装有后轮驱动主动轮和电机曲柄轮。其目的在于提供一种可让机器人高效、快速地完成工作,拖地更干净,拖地的效果非常好的

机器人手臂驱动装置.pdf
本发明公开了一种机器人手臂驱动装置,所述的机器人手臂驱动装置包含一第一连接支架和一第二连接支架,所述的第一连接支架通过一第一连杆与所述的第二连接支架相连接,所述的第二连接支架通过一连接凸块与一第二连杆相连接,所述的?第一连接支架的底部设有一可转动的驱动底盘,所述的驱动底盘上设有一对平行设置的驱动模块。本发明的机器人手臂驱动装置利用设置在驱动底盘上的一对平行设置的驱动模块,大大增强了初级电机的驱动能力,同时不必占用较大的空间。另外,由于步进电机的驱动凸轮直接与第一连接支架的连接突片的末端相连接,动力传递更为