
可穿戴式肌肉力量辅助装置及其控制方法和系统.pdf

飞舟****文章

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
可穿戴式肌肉力量辅助装置及其控制方法和系统.pdf
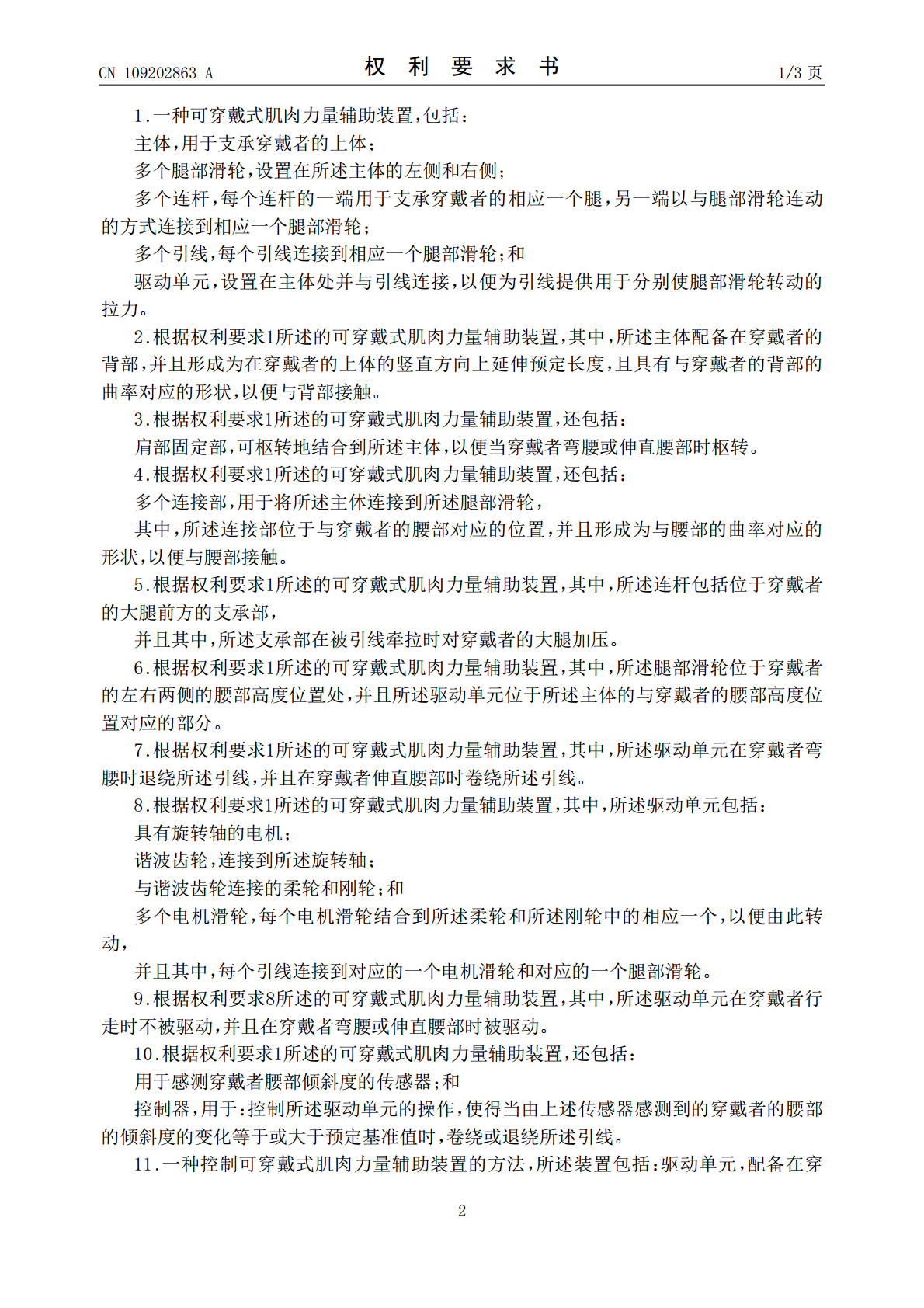
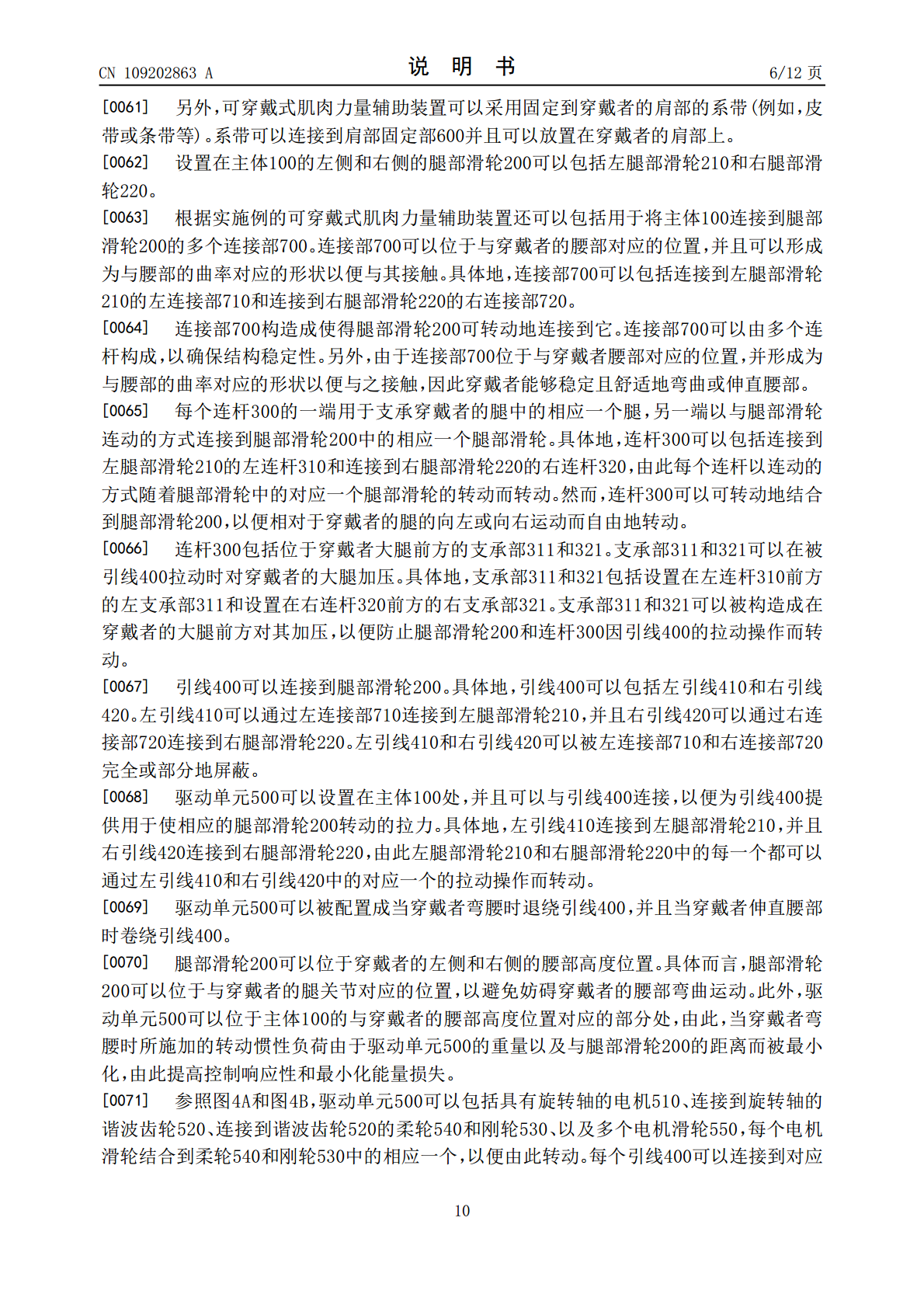
公开了一种可穿戴式肌肉力量辅助装置及其控制方法和系统。该可穿戴式肌肉力量辅助装置包括:主体,用于支承穿戴者的上体;多个腿部滑轮,设置在主体的左侧和右侧;多个连杆,每个连杆的一端用于支承穿戴者的相应一个腿部,另一端连接到相应一个腿部滑轮,以便与其连动;多个引线,每个引线连接到相应一个腿部滑轮;和驱动单元,设置在主体处并与引线连接,以便为引线提供用于使相应腿部滑轮转动的拉力。

穿戴式肌肉力量辅助装置.pdf
本发明公开一种穿戴式肌肉力量辅助装置,该穿戴式肌肉力量辅助装置包括:固定体,结合并固定到穿戴者的上身;肩胛框架,一侧在穿戴者的背面结合到固定体,另一侧在与穿戴者的背面接触的状态下以一侧为旋转中心可以在上下方向上旋转;固定框架,一侧可扭转地结合到肩胛框架的另一侧;支撑件,以包覆穿戴者的上臂的一部分的形状支撑穿戴者的上臂;以及补偿框架,与支撑件一体地结合,并且以穿戴者的肩部轴为基准可与支撑件一起旋转地结合到固定框架,产生根据以固定框架为基准旋转的角度而改变的支撑力。

用于辅助肌肉力量的可穿戴设备.pdf
本发明提供一种用于辅助肌肉力量的可穿戴设备,其包括:主体机构,其沿着穿戴者的躯干的竖直方向延伸,并且在穿戴者的肩膀下方固定到穿戴者的躯干的侧面;紧固机构,其沿着穿戴者的上臂的延伸方向延伸,并且设置在穿戴者的上臂的下表面并与其接触;连接机构,其使第一端联接到所述紧固机构,并且使第二端可移动地联接到所述主体机构,以便能够相对于所述主体机构移动;以及支撑机构,其可移动地联接在所述连接机构的第一端和第二端之间,以向所述连接机构施加支撑力,并且联接到所述主体机构并能够相对于其移动。
生理侦测系统、方法及其穿戴式装置.pdf
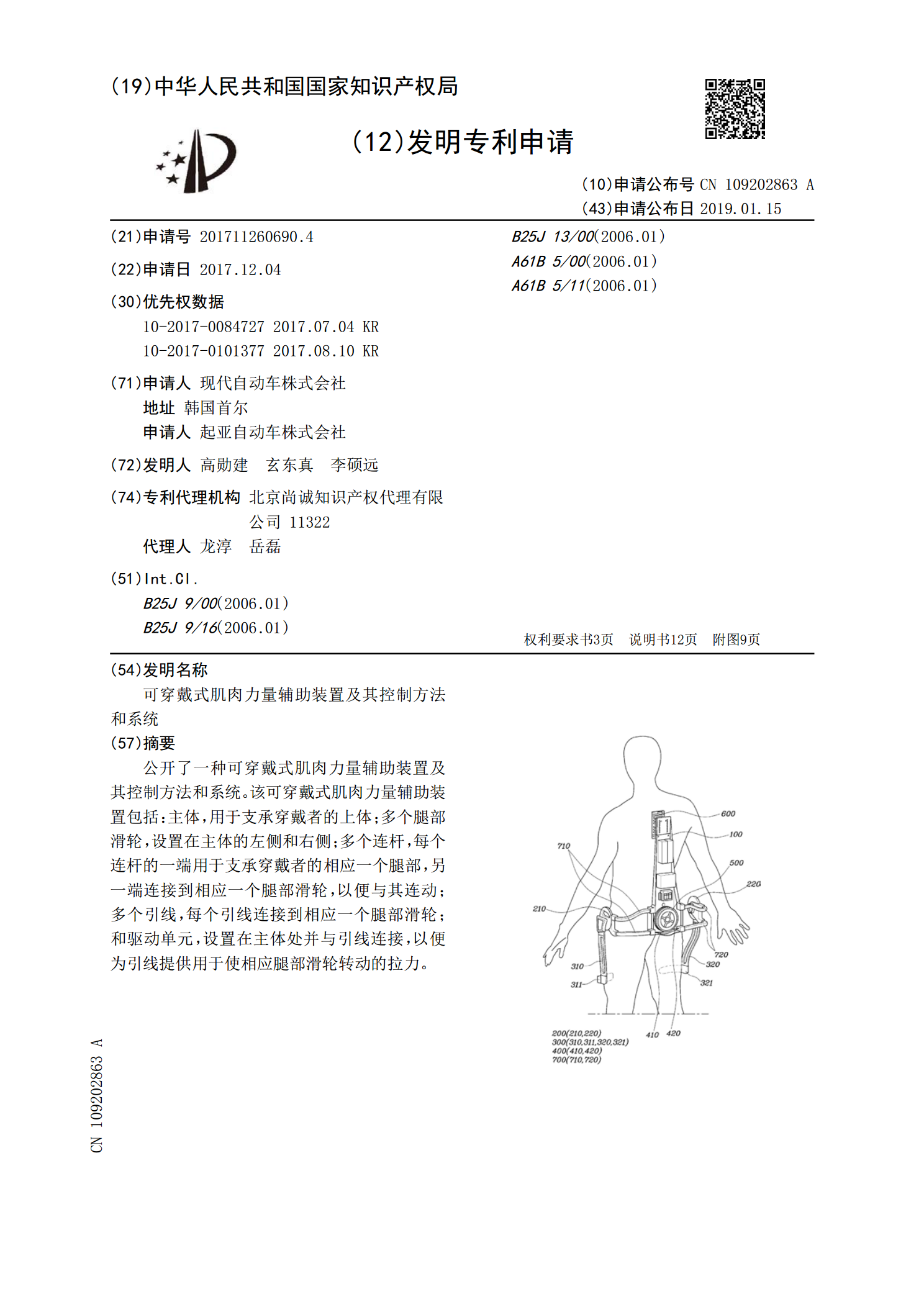
本发明涉及一种生理侦测系统,运行于穿戴式装置,所述生理侦测系统包括侦测模块,所述侦测模块用于接收一侦测信号,并依所述侦测信号判断是否有侦测到用户的生理特征,并生成侦测结果;及第一控制模块,所述第一控制模块用于依所述侦测结果控制所述穿戴式装置的电子元件的开启与关闭。本发明还提供一种生理侦测方法及一种穿戴式装置。
交互式通信系统、方法及其穿戴式装置.pdf
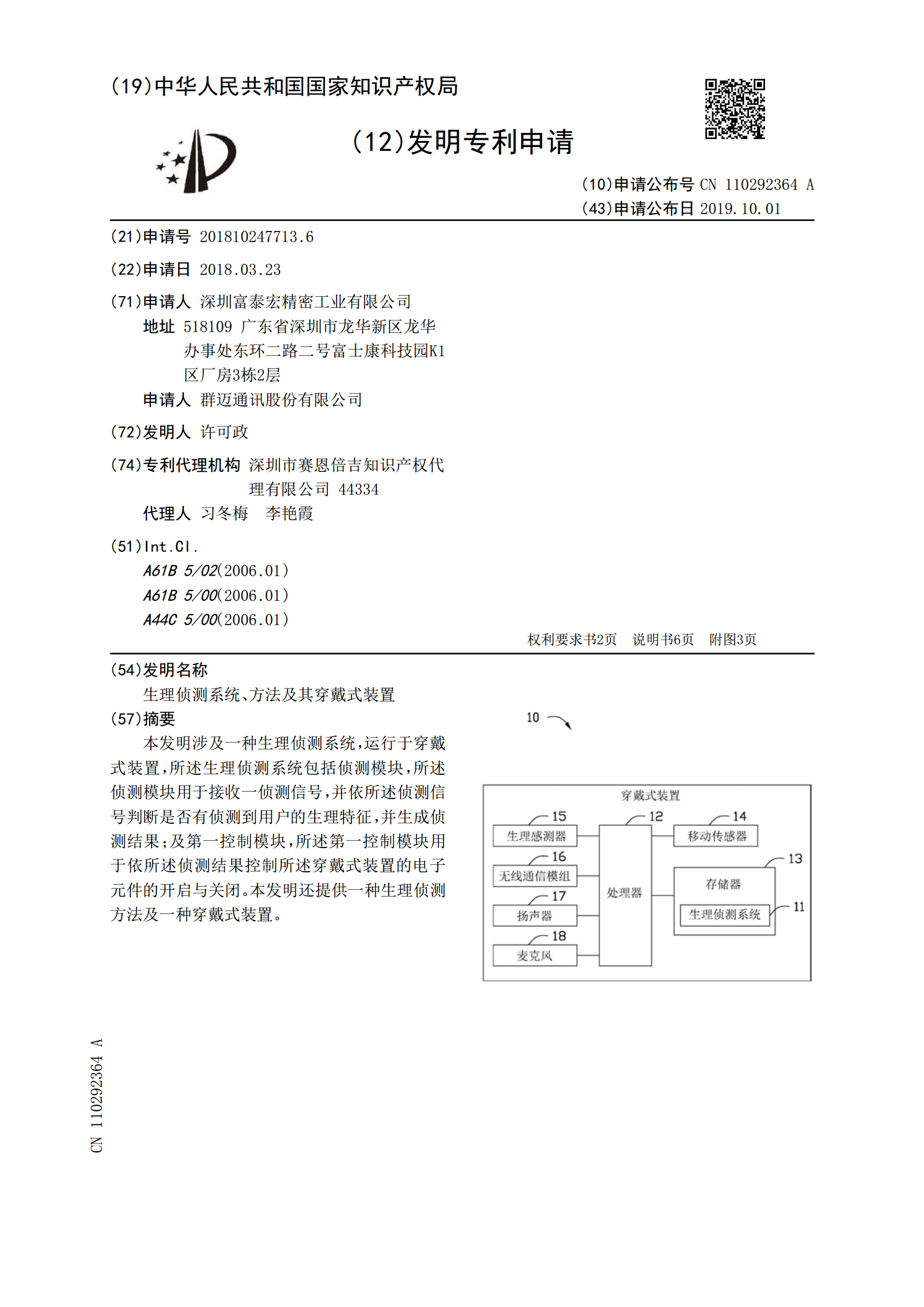
本发明公开一种交互式通信系统,所述系统包括至少一个穿戴式装置;至少一服务器;及至少一基地台,用于透过一网络连接所述至少一服务器。所述穿戴式装置包括第一传感器,用于感测穿戴式装置的运动状态,并生成第一感测信号;第二传感器,用于感测是否有一物体接触或接近所述穿戴式装置,并生成第二感测信号;微控制器,用于接收所述第一感测信号以及所述第二感测信号,并根据所述第一感测信号以及第二感测信号产生一第一控制信号;及无线通信模块,用于无线连接所述至少一基地台,并将所述第一控制信号透过所述至少一基地台传送给所述至少一服务器。