
电子驻车系统及电子驻车冗余制动控制方法.pdf

雨巷****彦峰


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
电子驻车系统及电子驻车冗余制动控制方法.pdf
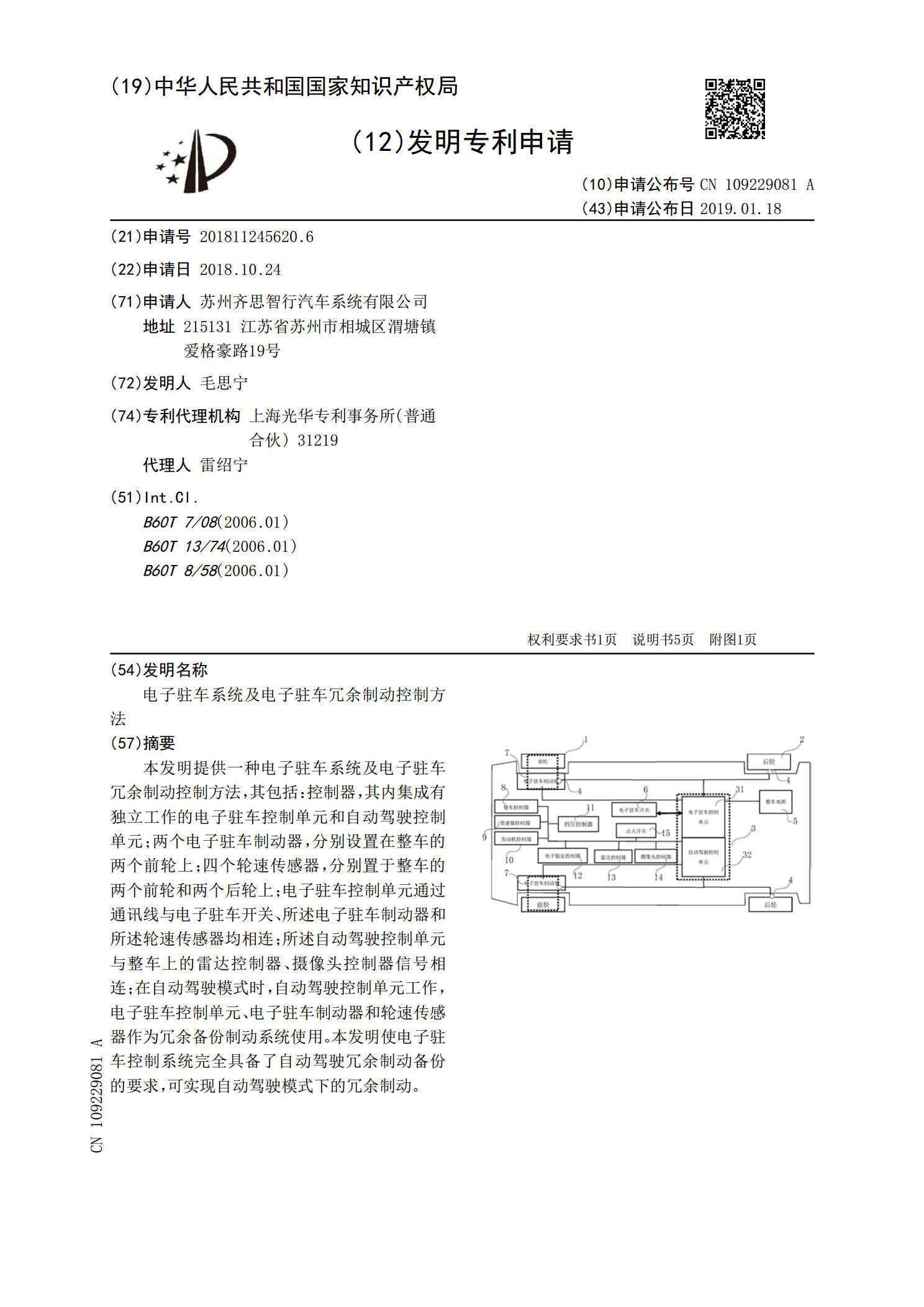
本发明提供一种电子驻车系统及电子驻车冗余制动控制方法,其包括:控制器,其内集成有独立工作的电子驻车控制单元和自动驾驶控制单元;两个电子驻车制动器,分别设置在整车的两个前轮上;四个轮速传感器,分别置于整车的两个前轮和两个后轮上;电子驻车控制单元通过通讯线与电子驻车开关、所述电子驻车制动器和所述轮速传感器均相连;所述自动驾驶控制单元与整车上的雷达控制器、摄像头控制器信号相连;在自动驾驶模式时,自动驾驶控制单元工作,电子驻车控制单元、电子驻车制动器和轮速传感器作为冗余备份制动系统使用。本发明使电子驻车控制系统完
电子驻车制动系统的制动方法、电子驻车制动系统及车辆.pdf
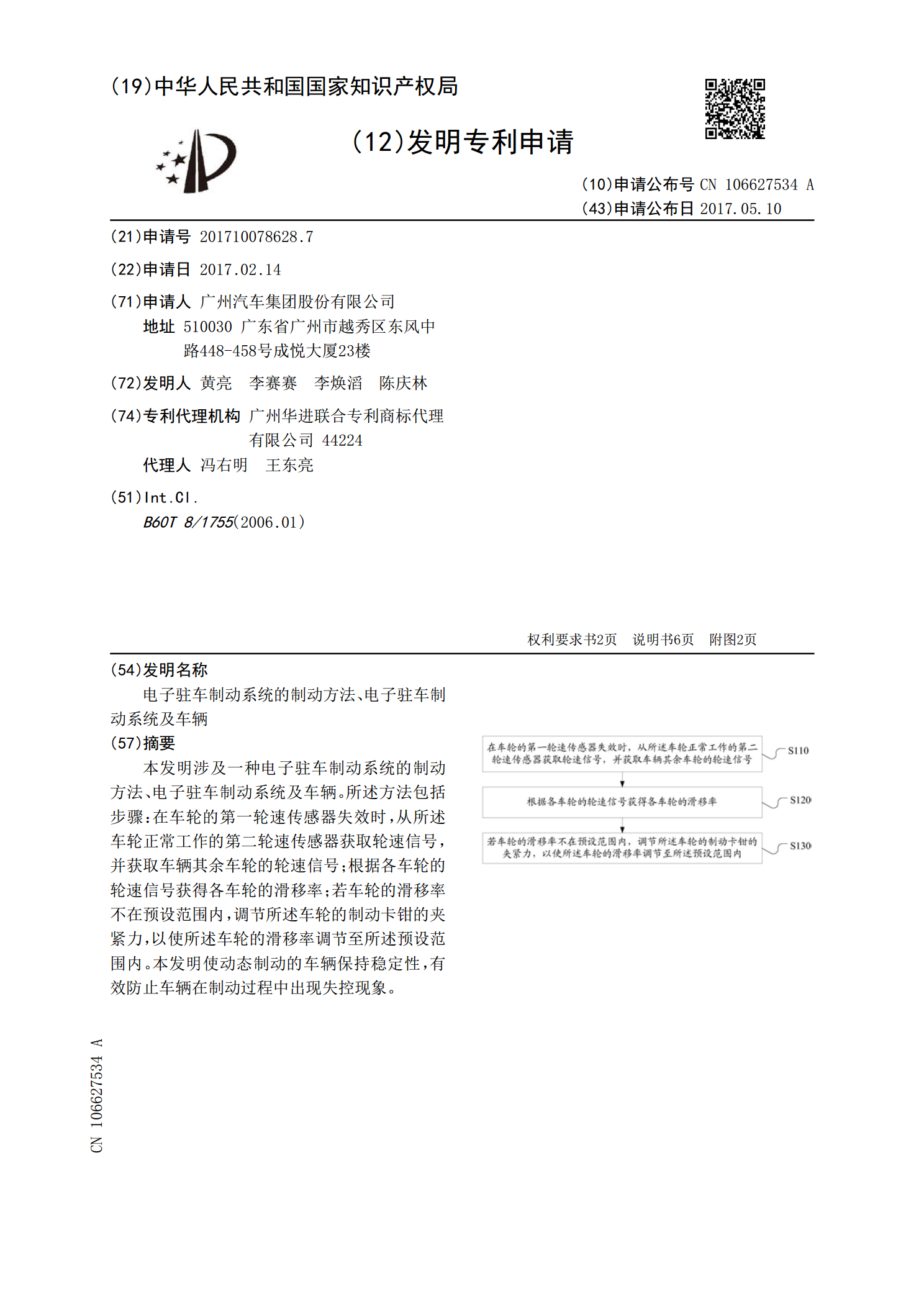
本发明涉及一种电子驻车制动系统的制动方法、电子驻车制动系统及车辆。所述方法包括步骤:在车轮的第一轮速传感器失效时,从所述车轮正常工作的第二轮速传感器获取轮速信号,并获取车辆其余车轮的轮速信号;根据各车轮的轮速信号获得各车轮的滑移率;若车轮的滑移率不在预设范围内,调节所述车轮的制动卡钳的夹紧力,以使所述车轮的滑移率调节至所述预设范围内。本发明使动态制动的车辆保持稳定性,有效防止车辆在制动过程中出现失控现象。

电子驻车制动系统的控制方法.pdf
本发明公开了一种电子驻车制动系统的控制方法,在车辆行驶时,当输入信号失效的情况下,打开电子驻车制动系统的电子驻车开关,使电子驻车制动系统执行开环控制模式,使车辆停止;在车辆停车时,打开电子驻车制动系统的电子驻车开关,使电子驻车制动系统执行闭环控制模式,使车辆静止;当输入信号有效的情况下,在车辆行驶时,打开电子驻车制动系统的电子驻车开关,使车辆停止;当车辆再次行驶时,关闭电子驻车制动系统的电子驻车开关,使车辆能够正常行驶。本发明电子驻车制动系统的控制方法,在轮速传感器、发动机控制模块或者点火开关的输入信号失
电子驻车制动系统及其控制方法.pdf
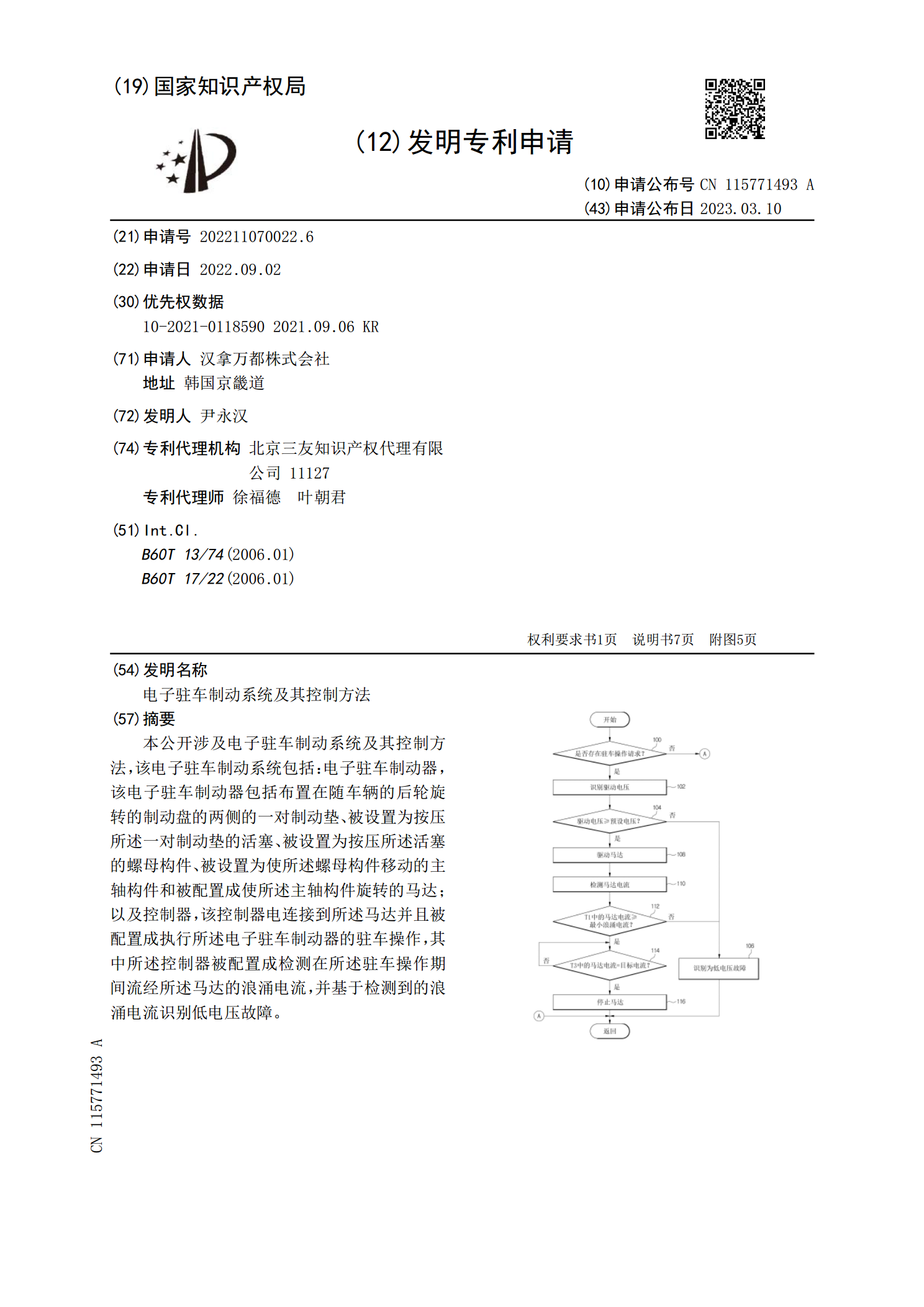
本公开涉及电子驻车制动系统及其控制方法,该电子驻车制动系统包括:电子驻车制动器,该电子驻车制动器包括布置在随车辆的后轮旋转的制动盘的两侧的一对制动垫、被设置为按压所述一对制动垫的活塞、被设置为按压所述活塞的螺母构件、被设置为使所述螺母构件移动的主轴构件和被配置成使所述主轴构件旋转的马达;以及控制器,该控制器电连接到所述马达并且被配置成执行所述电子驻车制动器的驻车操作,其中所述控制器被配置成检测在所述驻车操作期间流经所述马达的浪涌电流,并基于检测到的浪涌电流识别低电压故障。
电子驻车制动系统及其控制方法.pdf
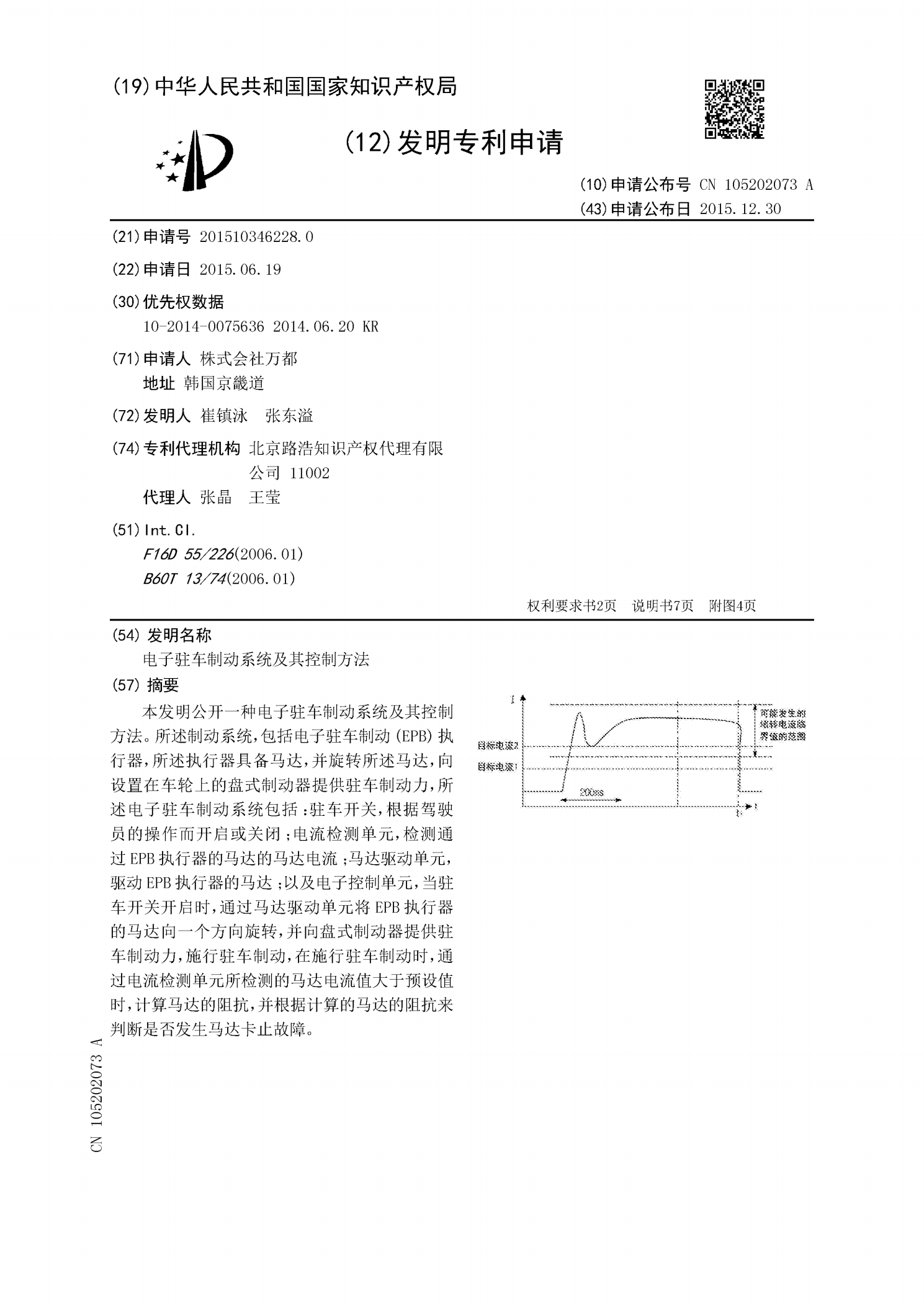
本发明公开一种电子驻车制动系统及其控制方法。所述制动系统,包括电子驻车制动(EPB)执行器,所述执行器具备马达,并旋转所述马达,向设置在车轮上的盘式制动器提供驻车制动力,所述电子驻车制动系统包括:驻车开关,根据驾驶员的操作而开启或关闭;电流检测单元,检测通过EPB执行器的马达的马达电流;马达驱动单元,驱动EPB执行器的马达;以及电子控制单元,当驻车开关开启时,通过马达驱动单元将EPB执行器的马达向一个方向旋转,并向盘式制动器提供驻车制动力,施行驻车制动,在施行驻车制动时,通过电流检测单元所检测的马达电流值