
一种高越障能力的电缆沟巡检机器人及其实现方法.pdf

文光****iu

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高越障能力的电缆沟巡检机器人及其实现方法.pdf
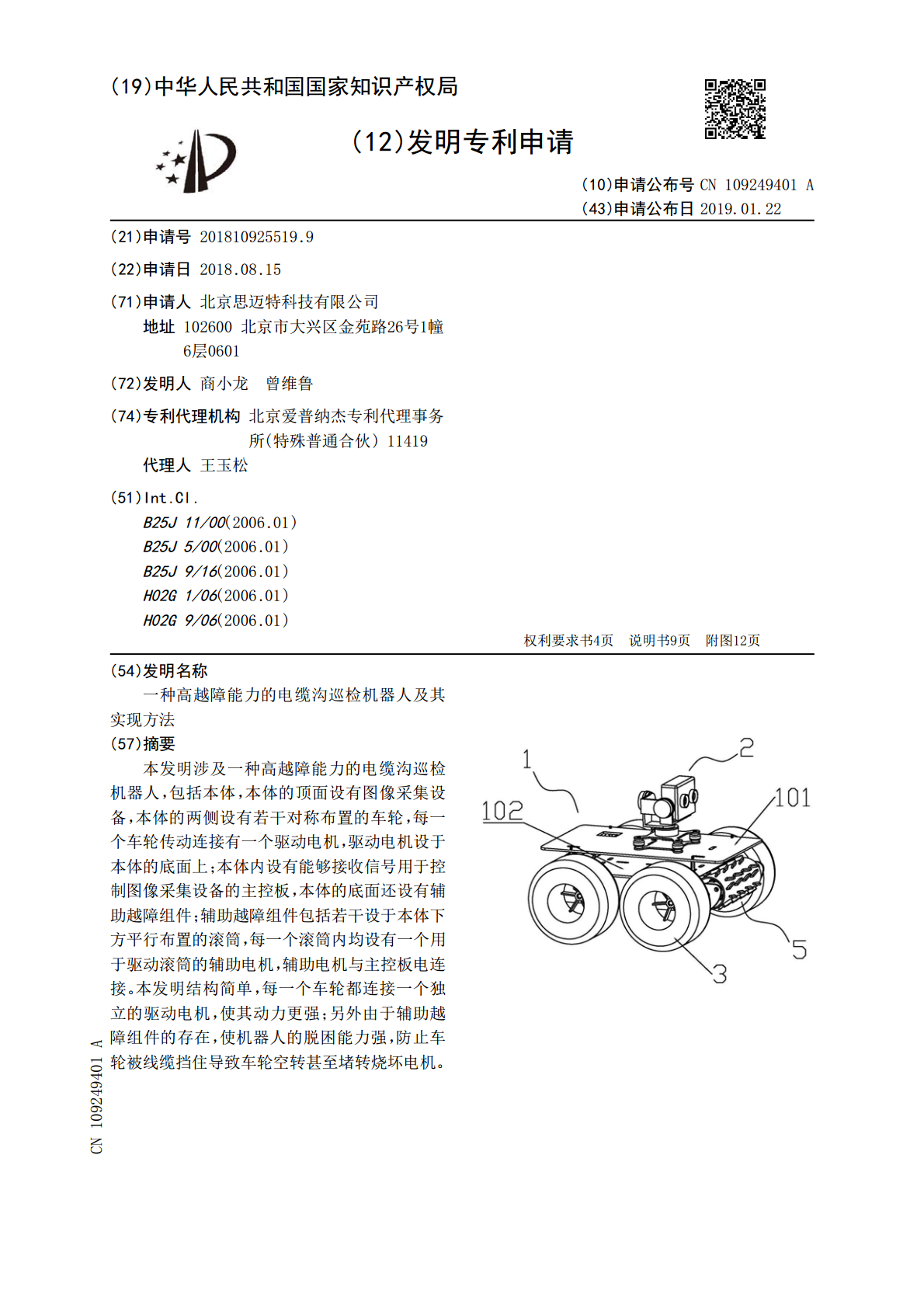
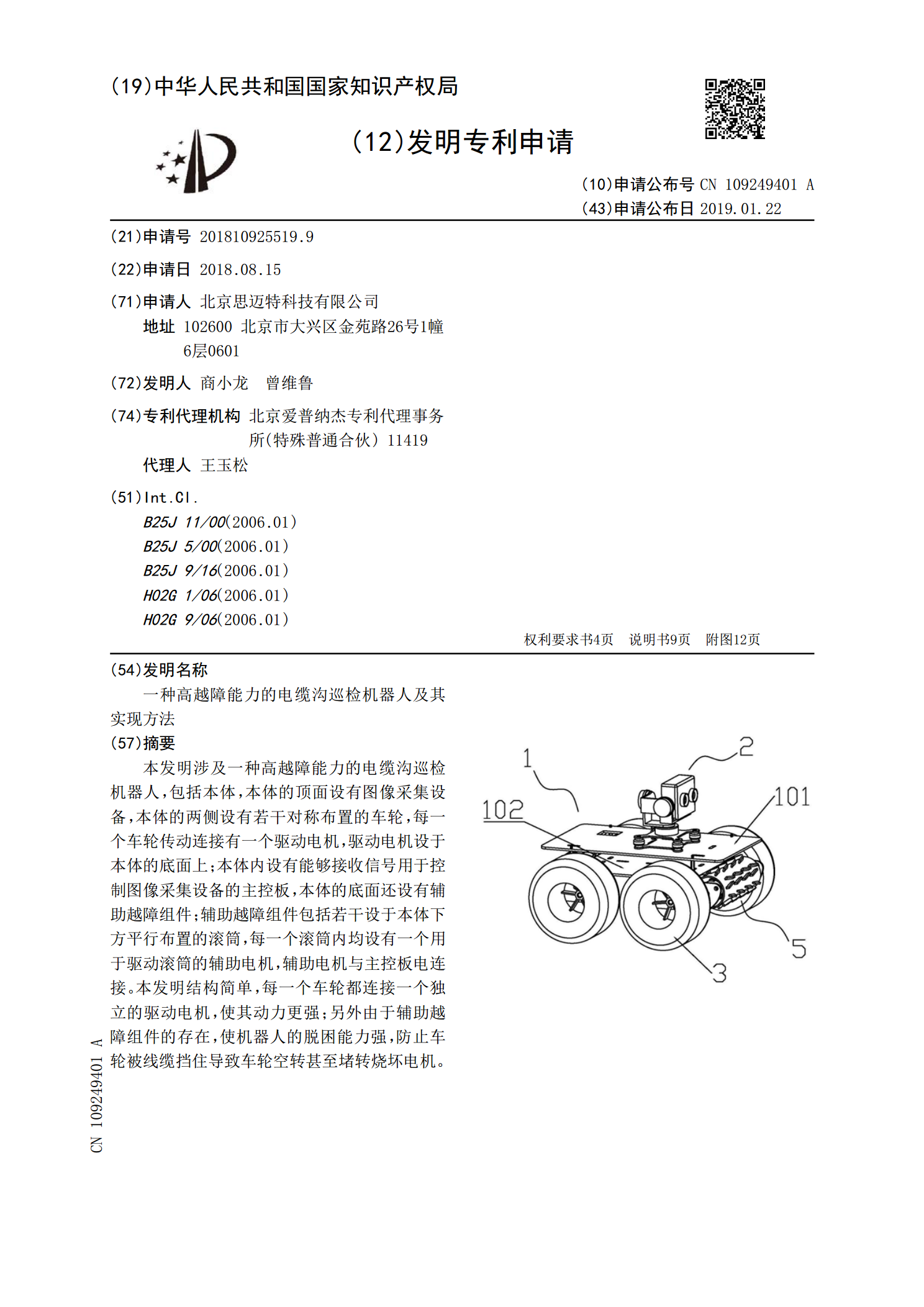
本发明涉及一种高越障能力的电缆沟巡检机器人,包括本体,本体的顶面设有图像采集设备,本体的两侧设有若干对称布置的车轮,每一个车轮传动连接有一个驱动电机,驱动电机设于本体的底面上;本体内设有能够接收信号用于控制图像采集设备的主控板,本体的底面还设有辅助越障组件;辅助越障组件包括若干设于本体下方平行布置的滚筒,每一个滚筒内均设有一个用于驱动滚筒的辅助电机,辅助电机与主控板电连接。本发明结构简单,每一个车轮都连接一个独立的驱动电机,使其动力更强;另外由于辅助越障组件的存在,使机器人的脱困能力强,防止车轮被线缆挡住
一种输电线巡检越障机器人及其控制方法.pdf
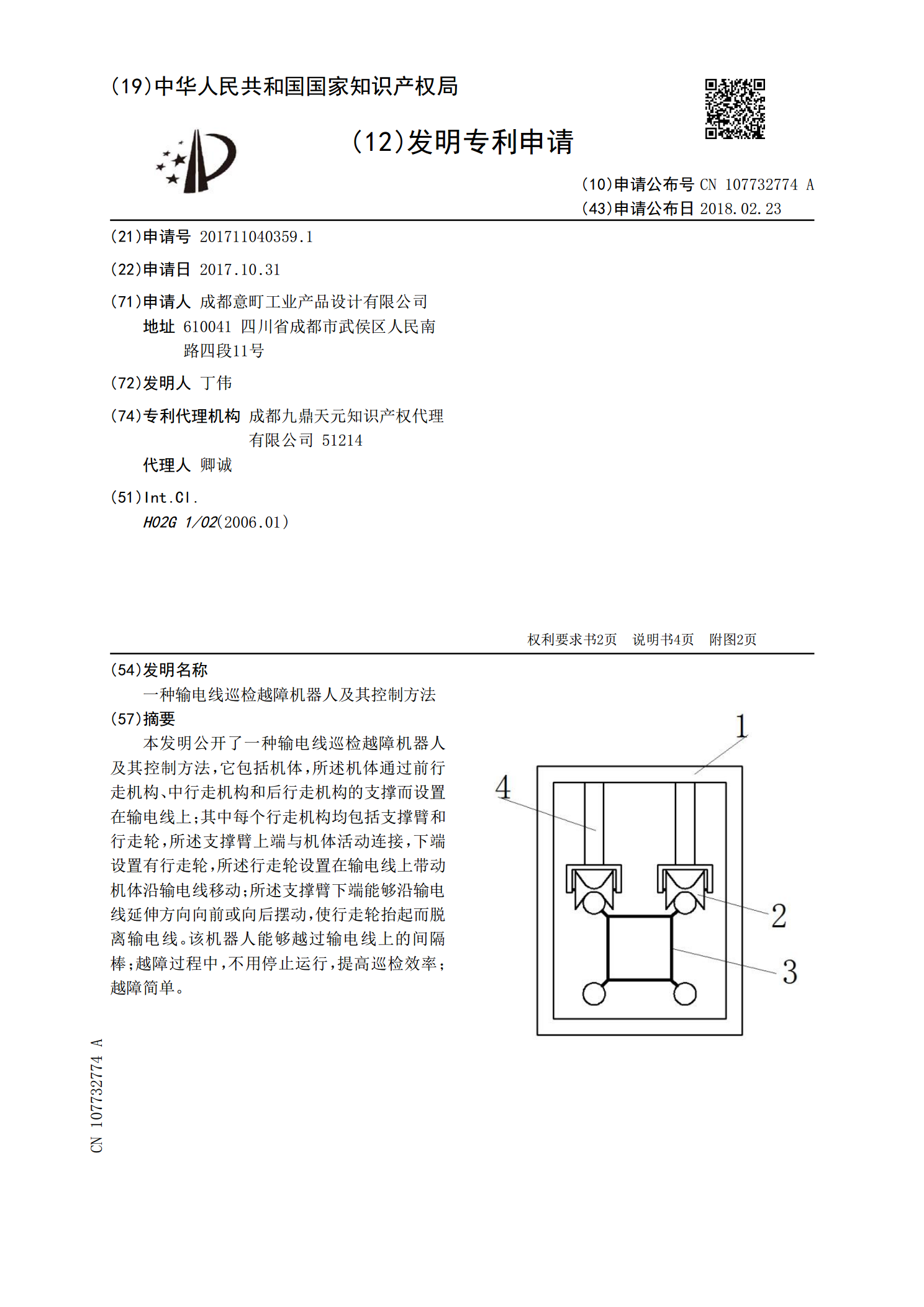
本发明公开了一种输电线巡检越障机器人及其控制方法,它包括机体,所述机体通过前行走机构、中行走机构和后行走机构的支撑而设置在输电线上;其中每个行走机构均包括支撑臂和行走轮,所述支撑臂上端与机体活动连接,下端设置有行走轮,所述行走轮设置在输电线上带动机体沿输电线移动;所述支撑臂下端能够沿输电线延伸方向向前或向后摆动,使行走轮抬起而脱离输电线。该机器人能够越过输电线上的间隔棒;越障过程中,不用停止运行,提高巡检效率;越障简单。
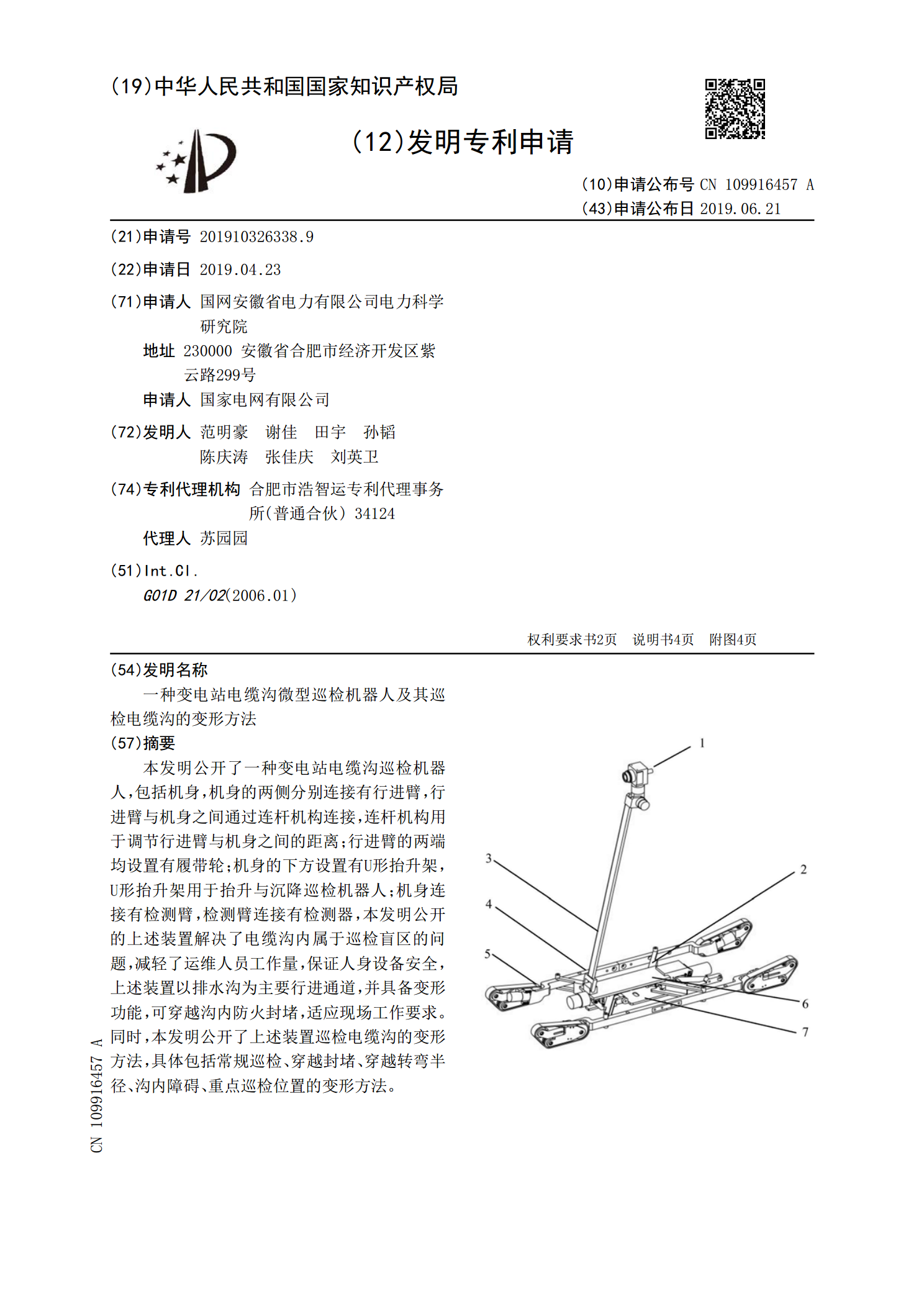
一种变电站电缆沟微型巡检机器人及其巡检电缆沟的变形方法.pdf
本发明公开了一种变电站电缆沟巡检机器人,包括机身,机身的两侧分别连接有行进臂,行进臂与机身之间通过连杆机构连接,连杆机构用于调节行进臂与机身之间的距离;行进臂的两端均设置有履带轮;机身的下方设置有U形抬升架,U形抬升架用于抬升与沉降巡检机器人;机身连接有检测臂,检测臂连接有检测器,本发明公开的上述装置解决了电缆沟内属于巡检盲区的问题,减轻了运维人员工作量,保证人身设备安全,上述装置以排水沟为主要行进通道,并具备变形功能,可穿越沟内防火封堵,适应现场工作要求。同时,本发明公开了上述装置巡检电缆沟的变形方法,
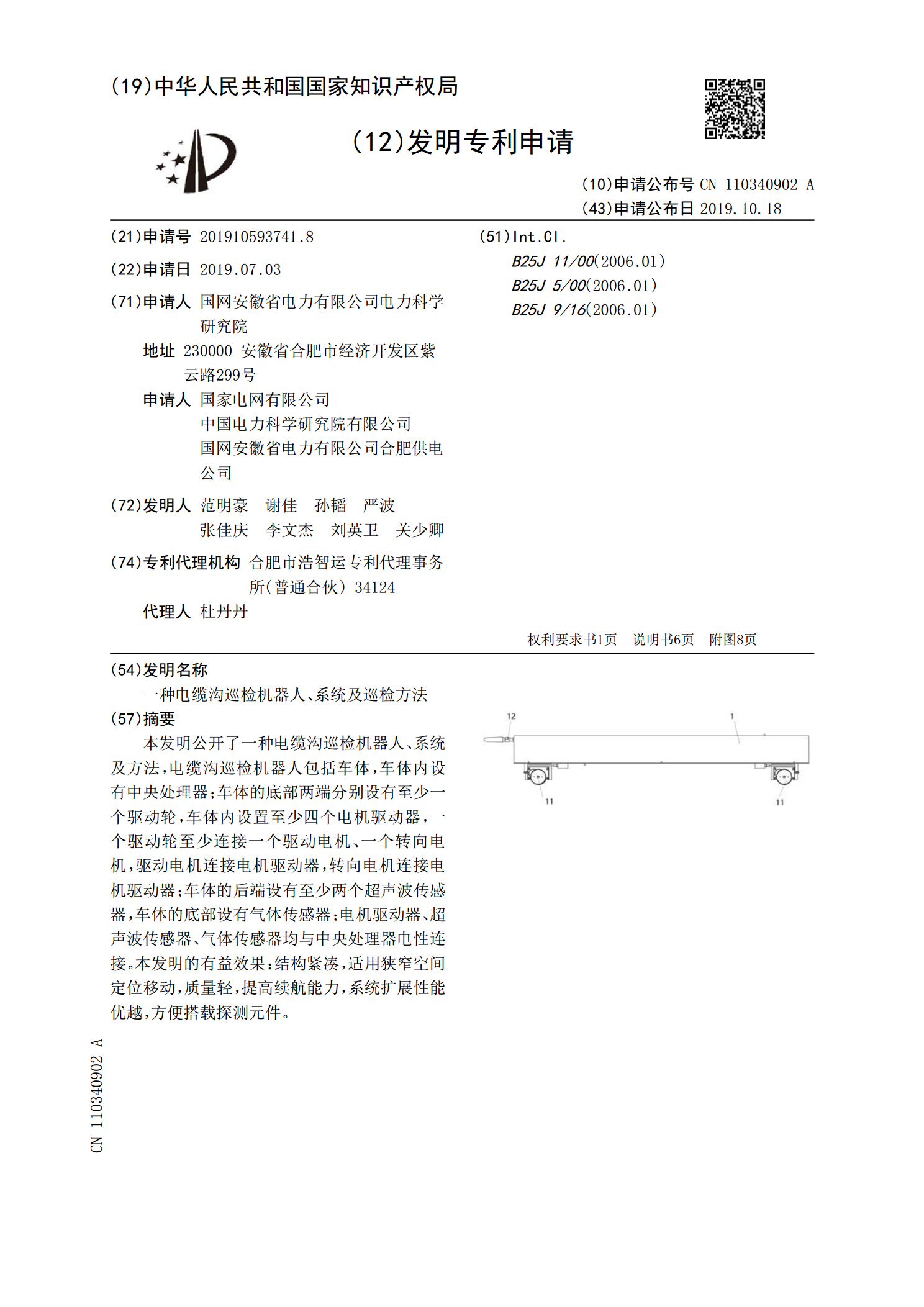
一种电缆沟巡检机器人、系统及巡检方法.pdf
本发明公开了一种电缆沟巡检机器人、系统及方法,电缆沟巡检机器人包括车体,车体内设有中央处理器;车体的底部两端分别设有至少一个驱动轮,车体内设置至少四个电机驱动器,一个驱动轮至少连接一个驱动电机、一个转向电机,驱动电机连接电机驱动器,转向电机连接电机驱动器;车体的后端设有至少两个超声波传感器,车体的底部设有气体传感器;电机驱动器、超声波传感器、气体传感器均与中央处理器电性连接。本发明的有益效果:结构紧凑,适用狭窄空间定位移动,质量轻,提高续航能力,系统扩展性能优越,方便搭载探测元件。
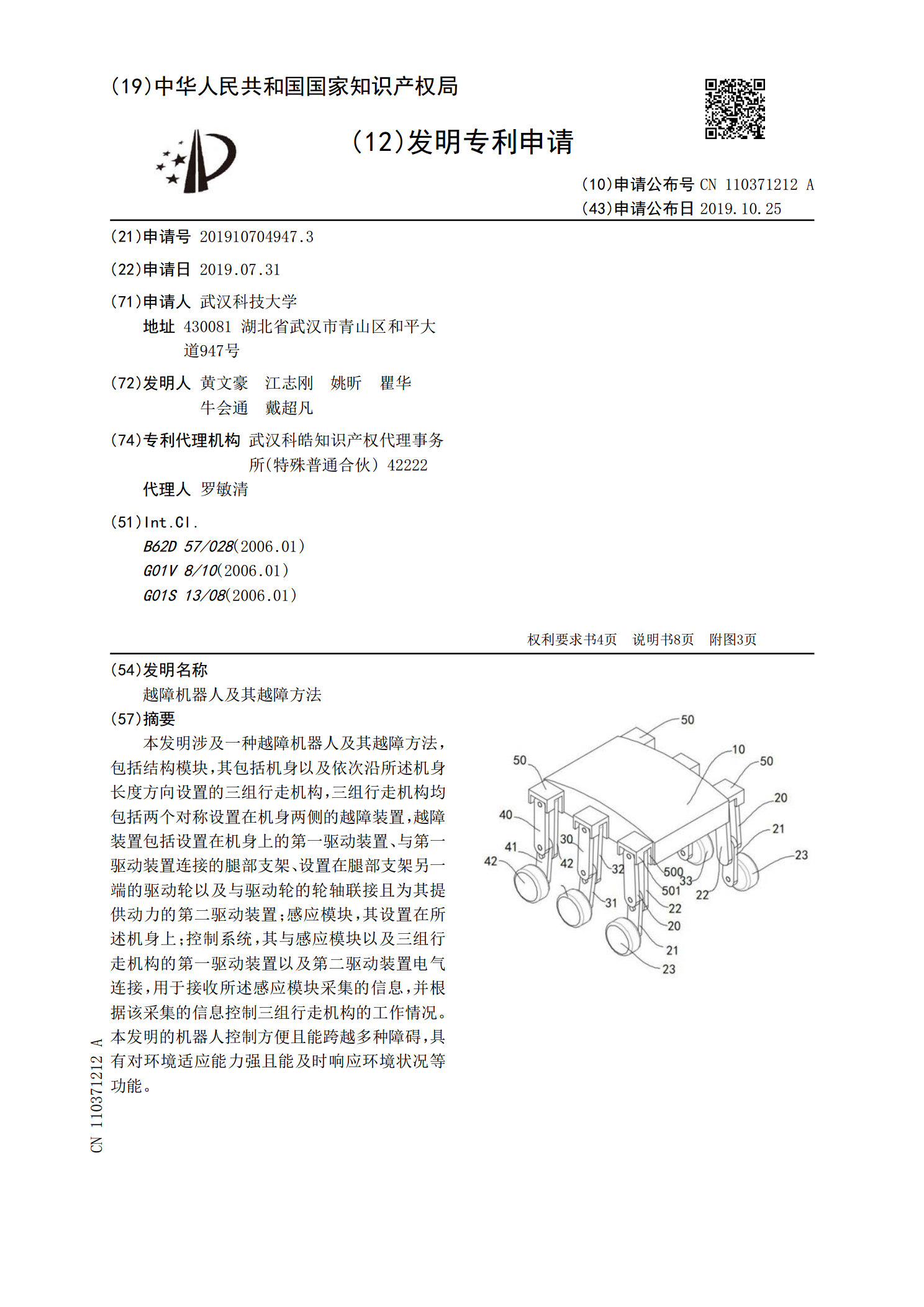
越障机器人及其越障方法.pdf
本发明涉及一种越障机器人及其越障方法,包括结构模块,其包括机身以及依次沿所述机身长度方向设置的三组行走机构,三组行走机构均包括两个对称设置在机身两侧的越障装置,越障装置包括设置在机身上的第一驱动装置、与第一驱动装置连接的腿部支架、设置在腿部支架另一端的驱动轮以及与驱动轮的轮轴联接且为其提供动力的第二驱动装置;感应模块,其设置在所述机身上;控制系统,其与感应模块以及三组行走机构的第一驱动装置以及第二驱动装置电气连接,用于接收所述感应模块采集的信息,并根据该采集的信息控制三组行走机构的工作情况。本发明的机器人