
一种用于无人驾驶车辆的实时通信控制方法.pdf

雅云****彩妍


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种用于无人驾驶车辆的实时通信控制方法.pdf
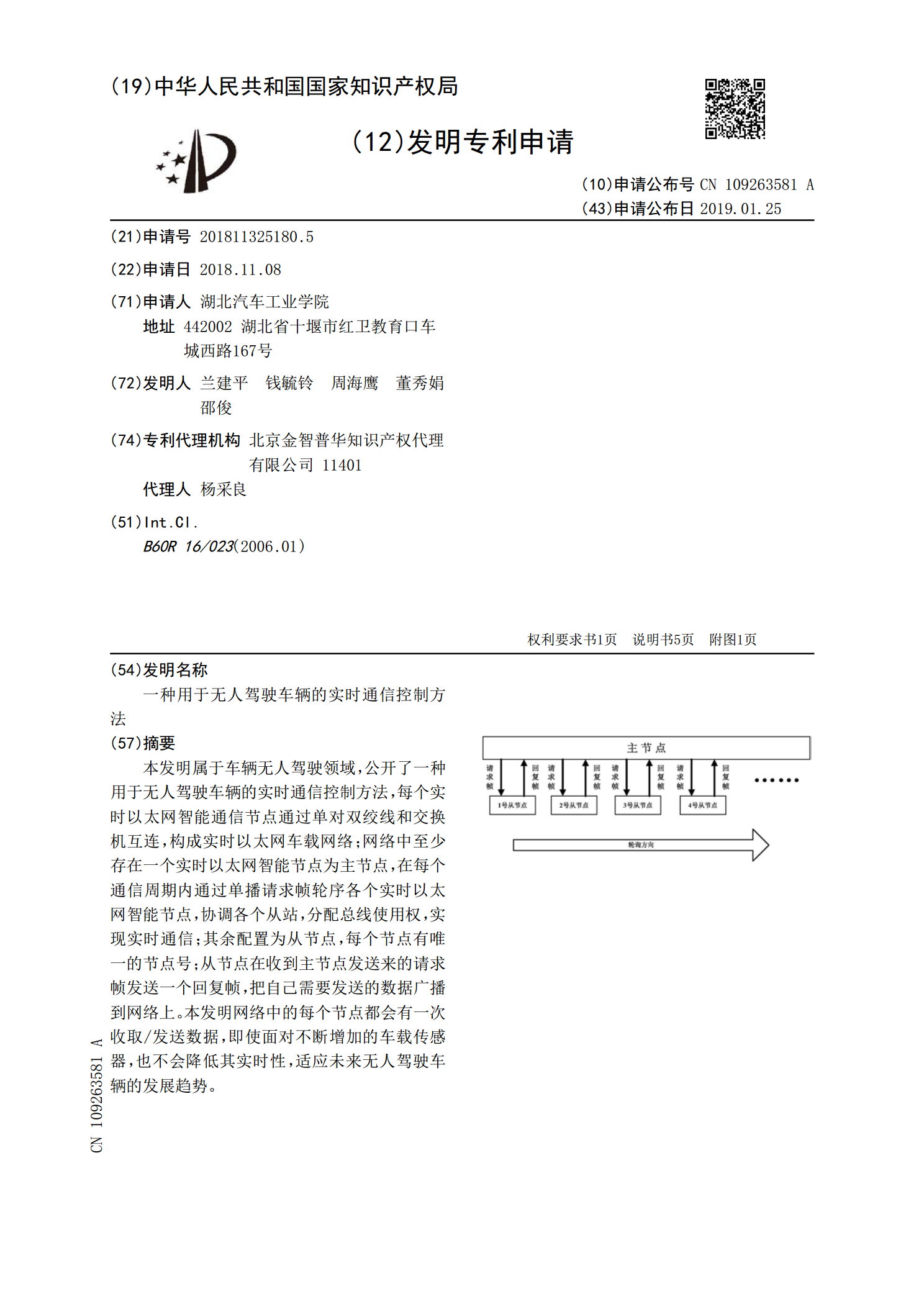
本发明属于车辆无人驾驶领域,公开了一种用于无人驾驶车辆的实时通信控制方法,每个实时以太网智能通信节点通过单对双绞线和交换机互连,构成实时以太网车载网络;网络中至少存在一个实时以太网智能节点为主节点,在每个通信周期内通过单播请求帧轮序各个实时以太网智能节点,协调各个从站,分配总线使用权,实现实时通信;其余配置为从节点,每个节点有唯一的节点号;从节点在收到主节点发送来的请求帧发送一个回复帧,把自己需要发送的数据广播到网络上。本发明网络中的每个节点都会有一次收取/发送数据,即使面对不断增加的车载传感器,也不会降
一种用于无人驾驶车辆的制动控制方法.pdf
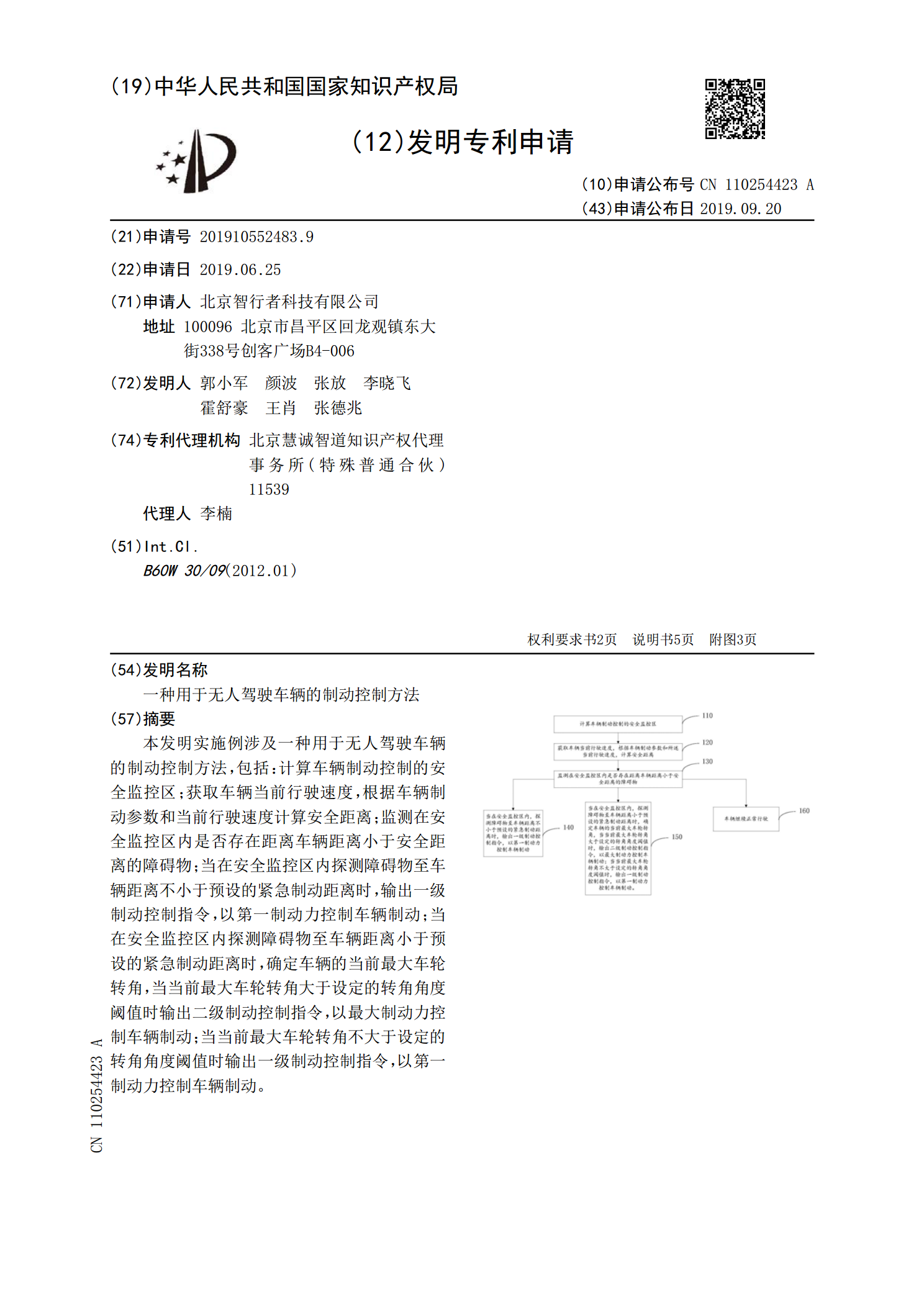
本发明实施例涉及一种用于无人驾驶车辆的制动控制方法,包括:计算车辆制动控制的安全监控区;获取车辆当前行驶速度,根据车辆制动参数和当前行驶速度计算安全距离;监测在安全监控区内是否存在距离车辆距离小于安全距离的障碍物;当在安全监控区内探测障碍物至车辆距离不小于预设的紧急制动距离时,输出一级制动控制指令,以第一制动力控制车辆制动;当在安全监控区内探测障碍物至车辆距离小于预设的紧急制动距离时,确定车辆的当前最大车轮转角,当当前最大车轮转角大于设定的转角角度阈值时输出二级制动控制指令,以最大制动力控制车辆制动;当当
一种用于无人驾驶车辆的轨迹跟踪控制方法.pdf
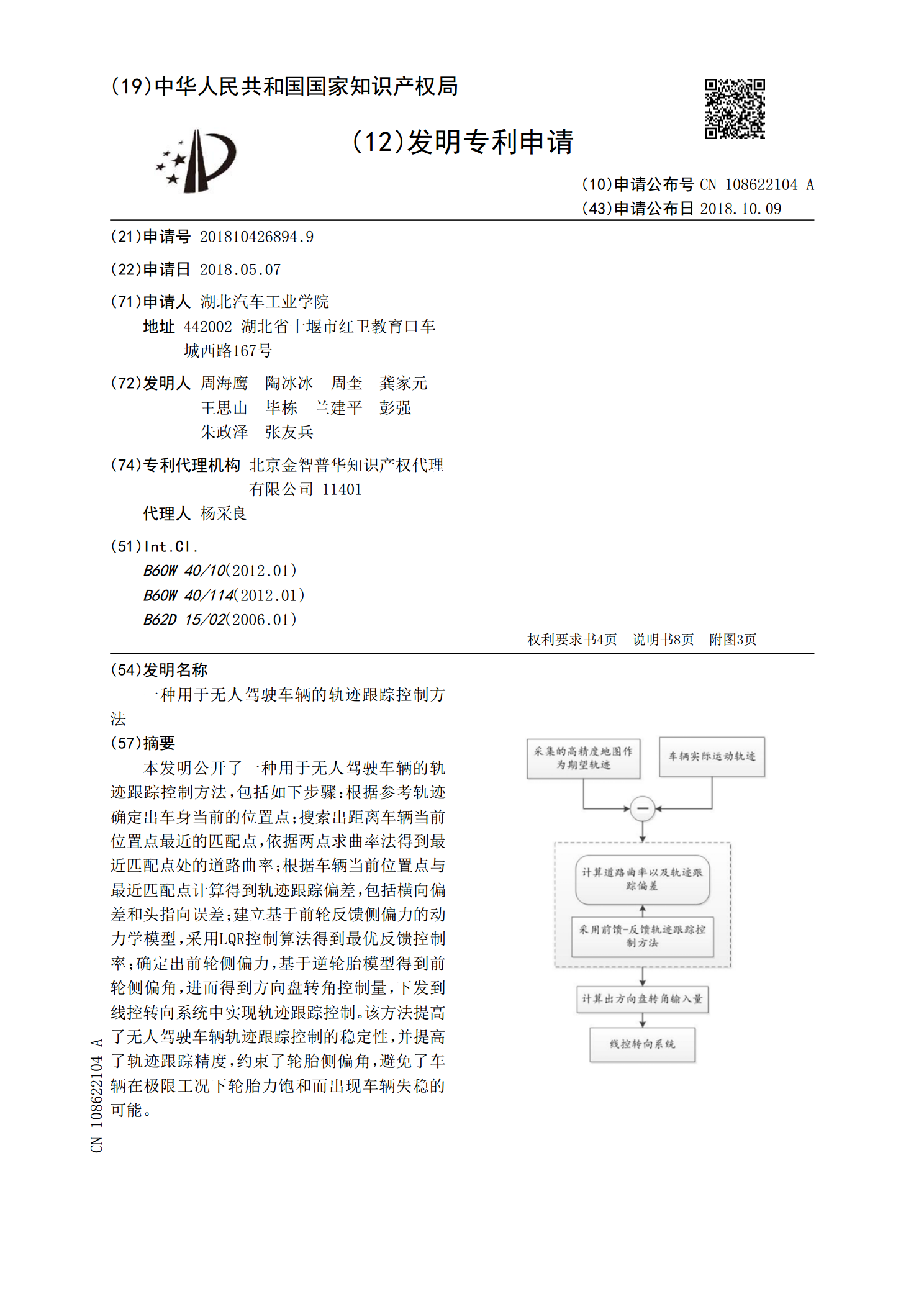
本发明公开了一种用于无人驾驶车辆的轨迹跟踪控制方法,包括如下步骤:根据参考轨迹确定出车身当前的位置点;搜索出距离车辆当前位置点最近的匹配点,依据两点求曲率法得到最近匹配点处的道路曲率;根据车辆当前位置点与最近匹配点计算得到轨迹跟踪偏差,包括横向偏差和头指向误差;建立基于前轮反馈侧偏力的动力学模型,采用LQR控制算法得到最优反馈控制率;确定出前轮侧偏力,基于逆轮胎模型得到前轮侧偏角,进而得到方向盘转角控制量,下发到线控转向系统中实现轨迹跟踪控制。该方法提高了无人驾驶车辆轨迹跟踪控制的稳定性,并提高了轨迹跟踪
无人驾驶车辆的控制方法及装置、无人驾驶车辆.pdf
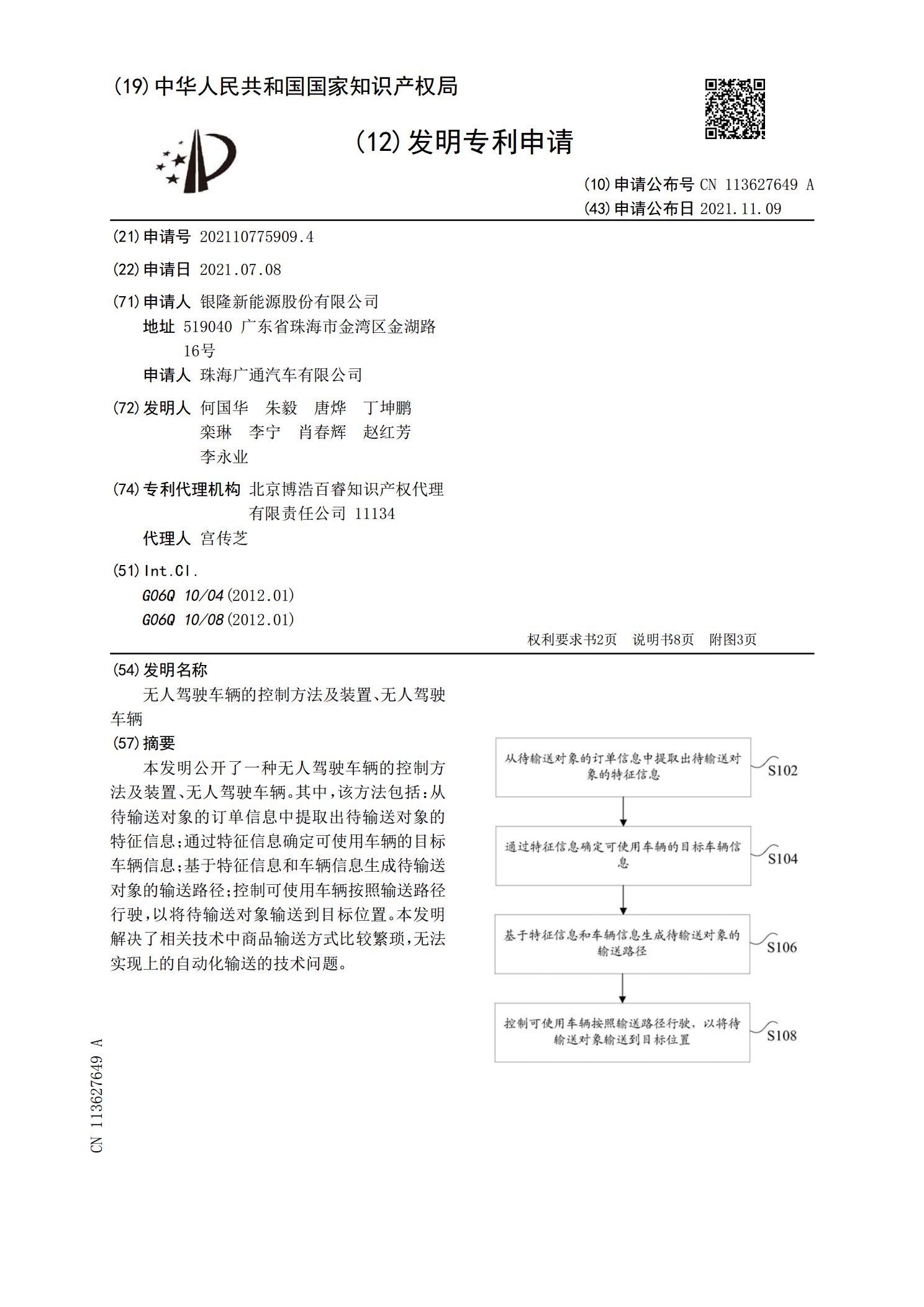
本发明公开了一种无人驾驶车辆的控制方法及装置、无人驾驶车辆。其中,该方法包括:从待输送对象的订单信息中提取出待输送对象的特征信息;通过特征信息确定可使用车辆的目标车辆信息;基于特征信息和车辆信息生成待输送对象的输送路径;控制可使用车辆按照输送路径行驶,以将待输送对象输送到目标位置。本发明解决了相关技术中商品输送方式比较繁琐,无法实现上的自动化输送的技术问题。

用于无人驾驶车辆的制动压力控制方法和装置.pdf
本发明公开了一种用于无人驾驶车辆的制动压力控制方法和装置,属于车辆制动领域。装置包括:无人驾驶车辆中包括CAN总线、上层控制器、制动压力控制装置和车轮,制动压力控制装置和车轮相连接,制动压力控制装置包括电子控制单元ECU、液压模块和电机;ECU、液压模块和电机两两之间均相连接;ECU,用于通过CAN总线接收上层控制器发送的第一压力控制指令,第一压力控制指令为控制无人驾驶车辆的制动压力增大、不变或减小的指令;ECU,还用于根据第一压力控制指令,控制液压模块的工作状态和电机的工作状态;液压模块和电机,用于在E