
轮毂电机驱动汽车的车道偏离辅助控制系统及控制方法.pdf

是丹****ni

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轮毂电机驱动汽车的车道偏离辅助控制系统及控制方法.pdf
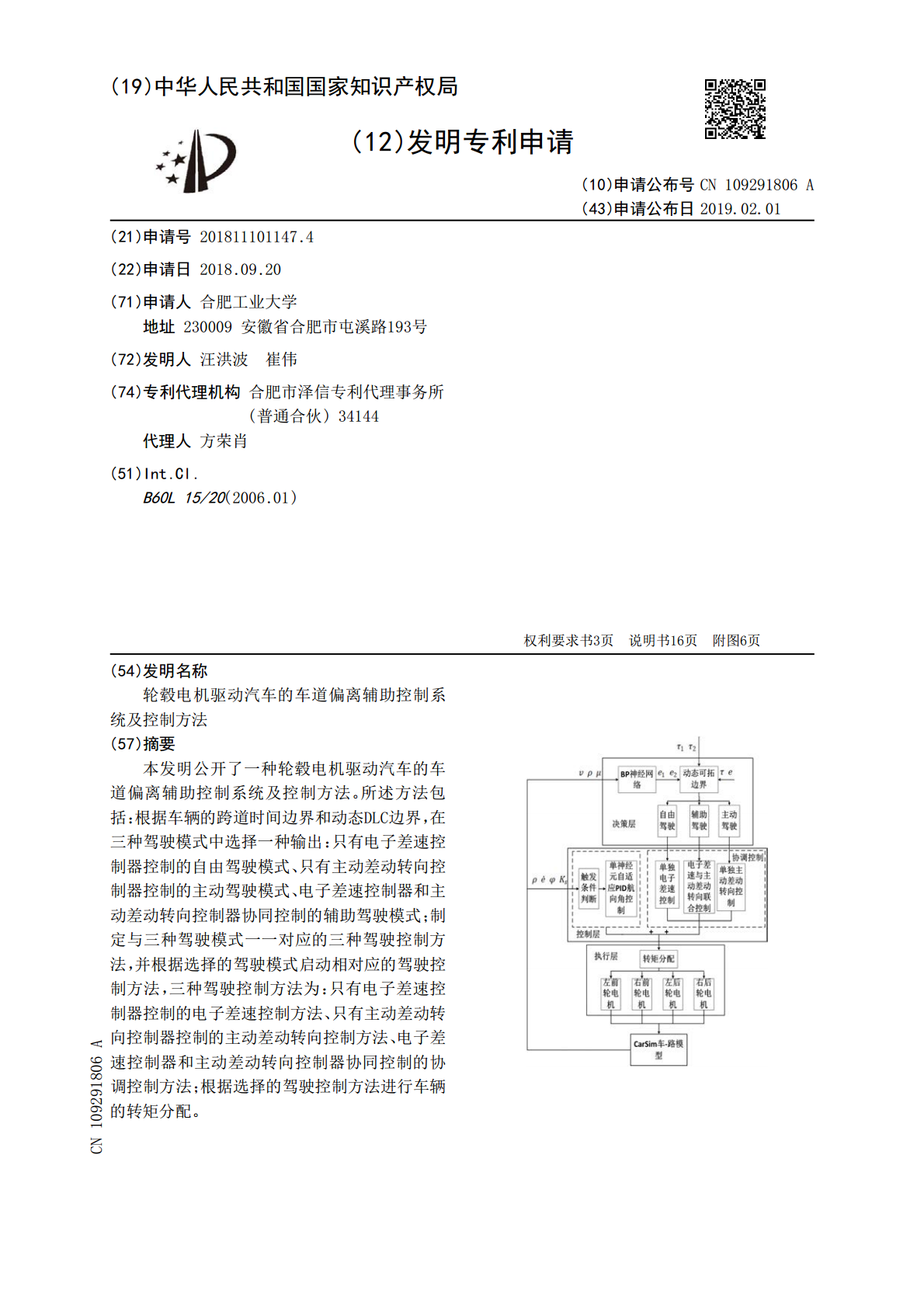
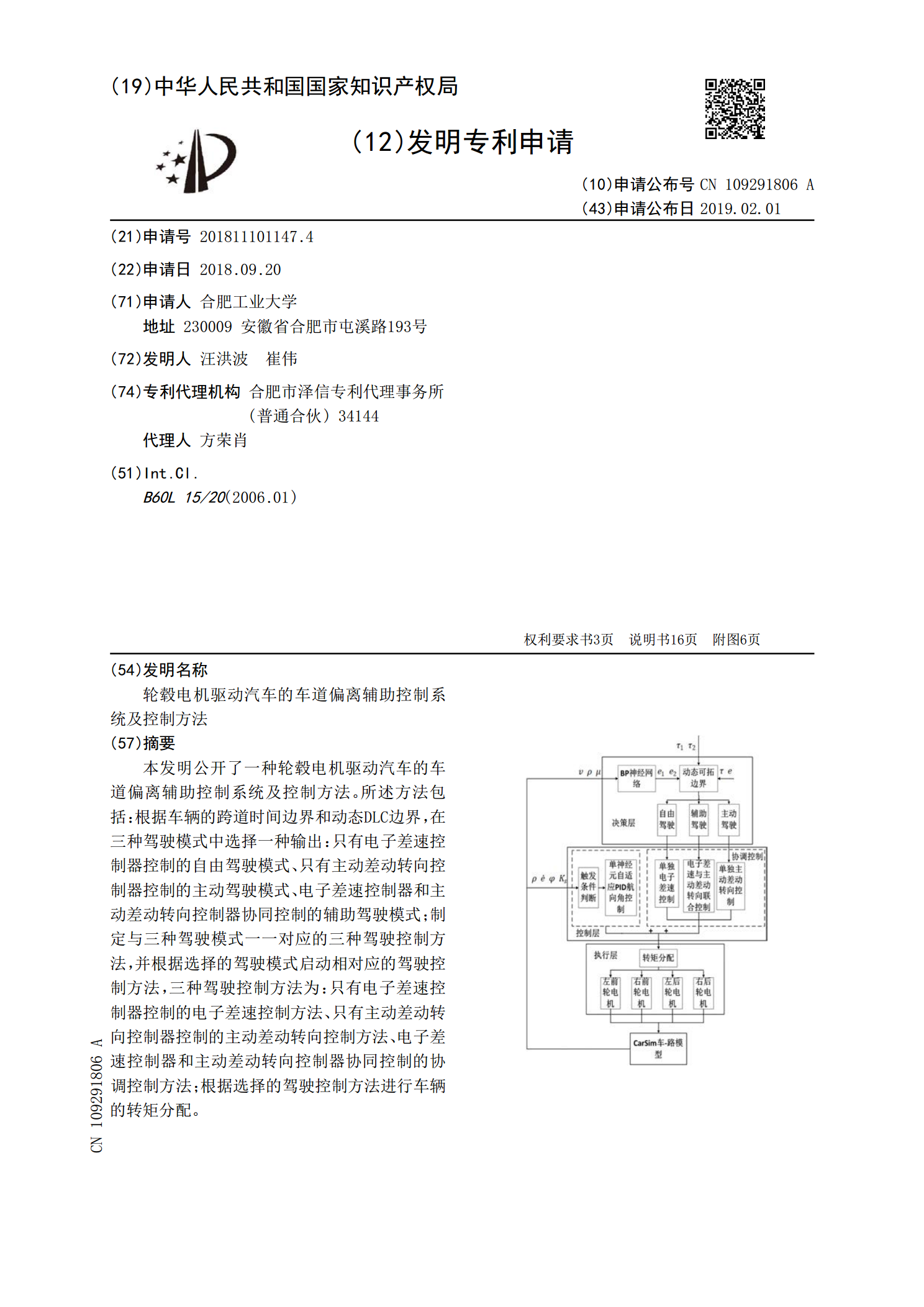
本发明公开了一种轮毂电机驱动汽车的车道偏离辅助控制系统及控制方法。所述方法包括:根据车辆的跨道时间边界和动态DLC边界,在三种驾驶模式中选择一种输出:只有电子差速控制器控制的自由驾驶模式、只有主动差动转向控制器控制的主动驾驶模式、电子差速控制器和主动差动转向控制器协同控制的辅助驾驶模式;制定与三种驾驶模式一一对应的三种驾驶控制方法,并根据选择的驾驶模式启动相对应的驾驶控制方法,三种驾驶控制方法为:只有电子差速控制器控制的电子差速控制方法、只有主动差动转向控制器控制的主动差动转向控制方法、电子差速控制器和主
一种车道偏离辅助控制系统的转矩分配控制方法.pdf
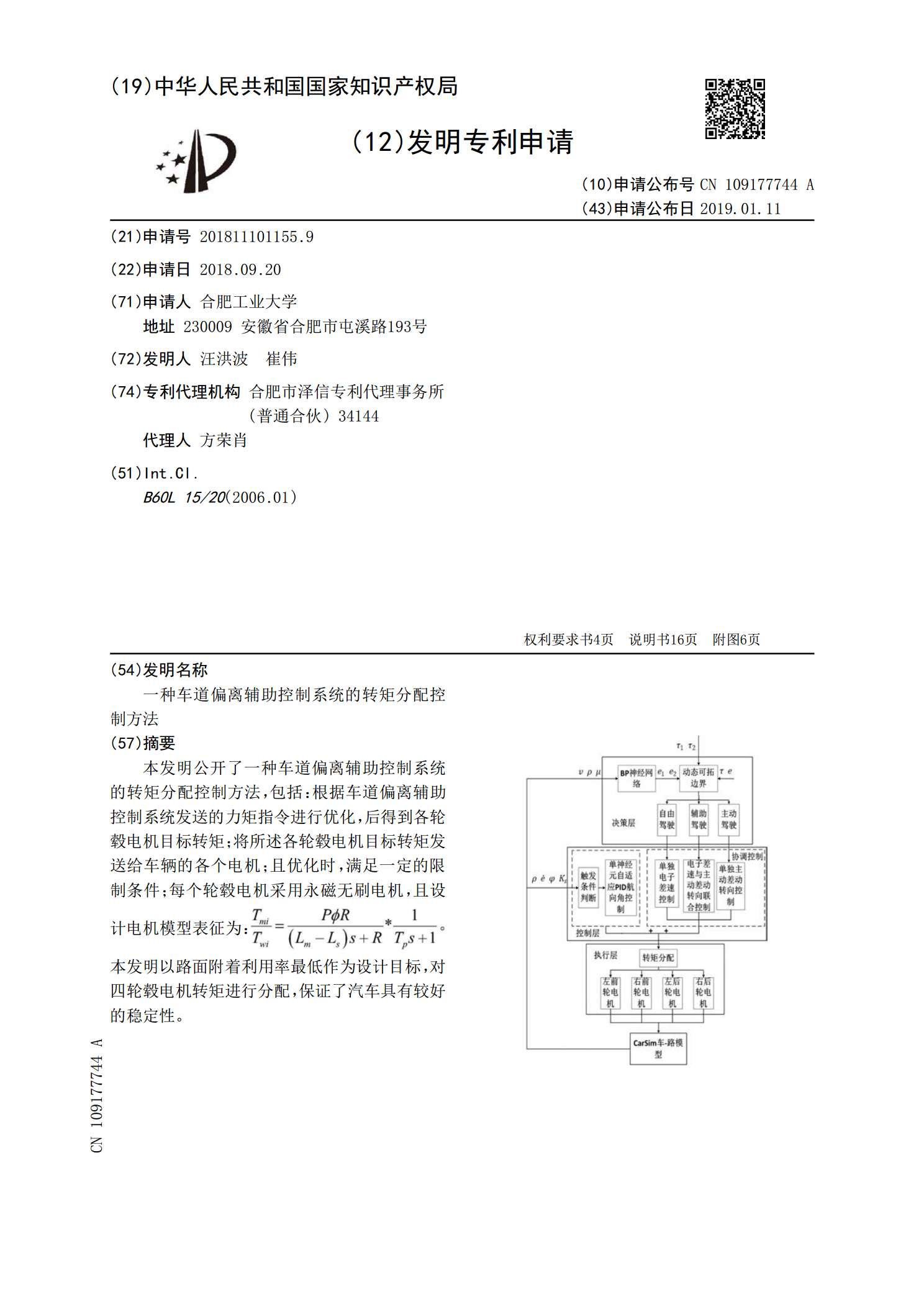
本发明公开了一种车道偏离辅助控制系统的转矩分配控制方法,包括:根据车道偏离辅助控制系统发送的力矩指令进行优化,后得到各轮毂电机目标转矩;将所述各轮毂电机目标转矩发送给车辆的各个电机;且优化时,满足一定的限制条件;每个轮毂电机采用永磁无刷电机,且设计电机模型表征为:

基于轮毂电机的纯电动汽车驱动防滑控制系统及方法.pdf
本发明提供一种基于轮毂电机的纯电动汽车驱动防滑控制方法,获取左前轮、右前轮、左后轮和右后轮的轮速,判断左前轮、右前轮的轮速差值是否小于或等于150r/min,是则取左前轮轮速w1作为前轮目标转速,否则取较小者为前轮目标转速;同理算出后轮目标转速M_Speed_R;二者比较得到整车的目标转速;分别将4个车轮的轮速与整车的目标转速对比,当判断该车轮有飞转的趋势,则降低发送给该车轮的轮毂电机控制器的力矩命令;当4个车轮的轮速均在合理范围内,则发送给各个轮毂电机控制器的力矩命令恢复为由驾驶员意图决定其大小的模式,
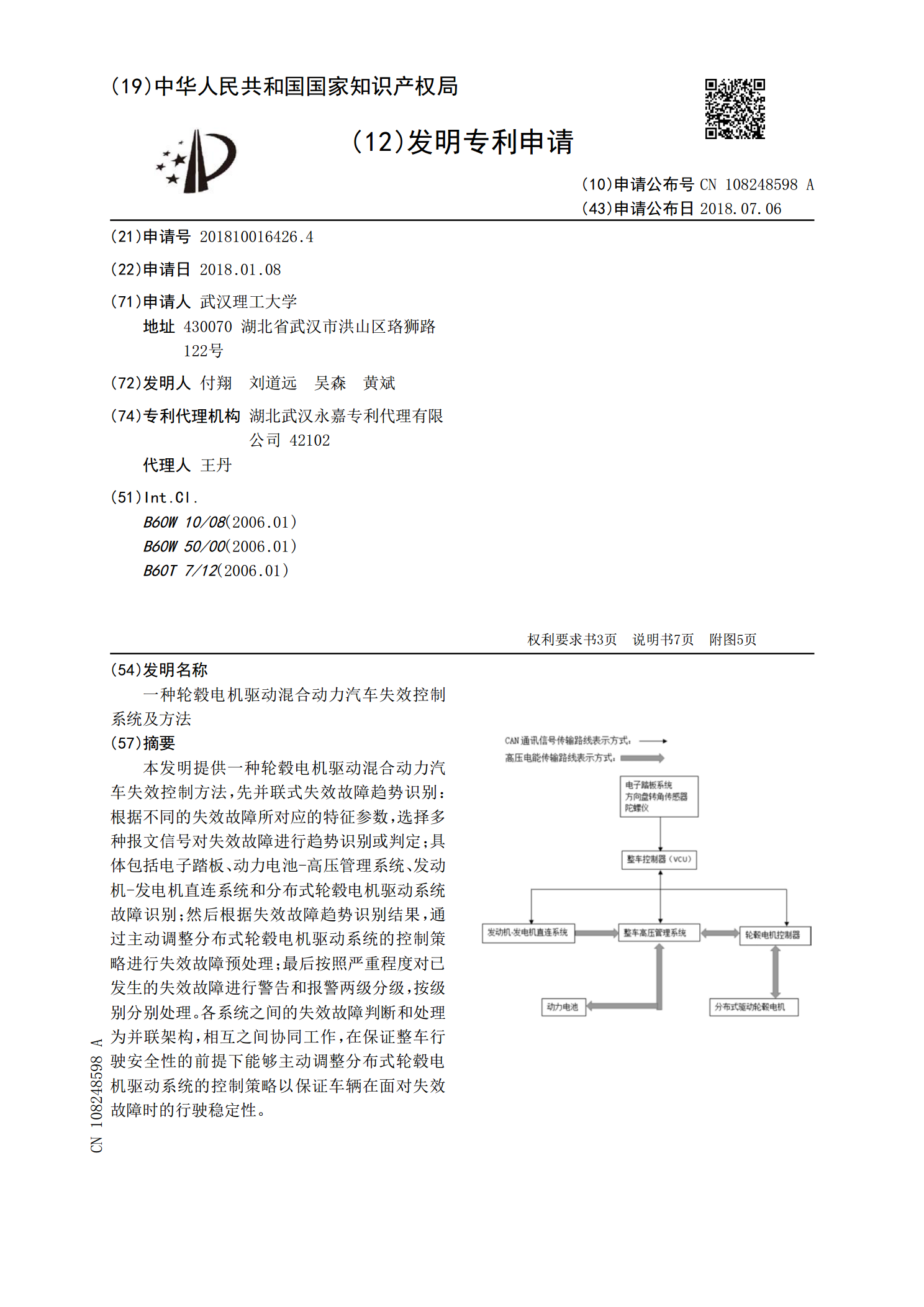
一种轮毂电机驱动混合动力汽车失效控制系统及方法.pdf
本发明提供一种轮毂电机驱动混合动力汽车失效控制方法,先并联式失效故障趋势识别:根据不同的失效故障所对应的特征参数,选择多种报文信号对失效故障进行趋势识别或判定;具体包括电子踏板、动力电池‑高压管理系统、发动机‑发电机直连系统和分布式轮毂电机驱动系统故障识别;然后根据失效故障趋势识别结果,通过主动调整分布式轮毂电机驱动系统的控制策略进行失效故障预处理;最后按照严重程度对已发生的失效故障进行警告和报警两级分级,按级别分别处理。各系统之间的失效故障判断和处理为并联架构,相互之间协同工作,在保证整车行驶安全性的前
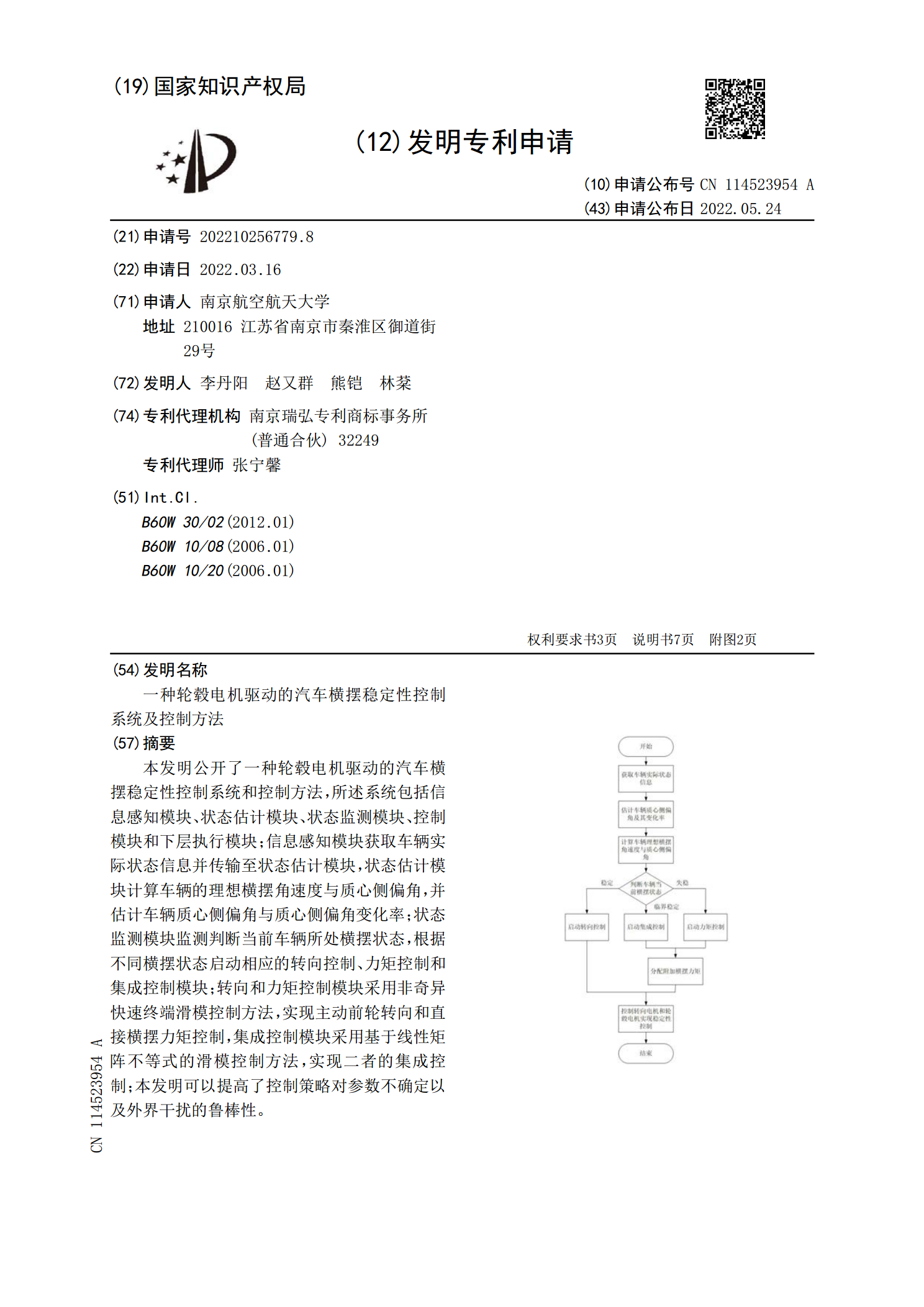
一种轮毂电机驱动的汽车横摆稳定性控制系统及控制方法.pdf
本发明公开了一种轮毂电机驱动的汽车横摆稳定性控制系统和控制方法,所述系统包括信息感知模块、状态估计模块、状态监测模块、控制模块和下层执行模块;信息感知模块获取车辆实际状态信息并传输至状态估计模块,状态估计模块计算车辆的理想横摆角速度与质心侧偏角,并估计车辆质心侧偏角与质心侧偏角变化率;状态监测模块监测判断当前车辆所处横摆状态,根据不同横摆状态启动相应的转向控制、力矩控制和集成控制模块;转向和力矩控制模块采用非奇异快速终端滑模控制方法,实现主动前轮转向和直接横摆力矩控制,集成控制模块采用基于线性矩阵不等式的