
一种智能自移动设备及其减速装置.pdf

是你****馨呀


1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能自移动设备及其减速装置.pdf
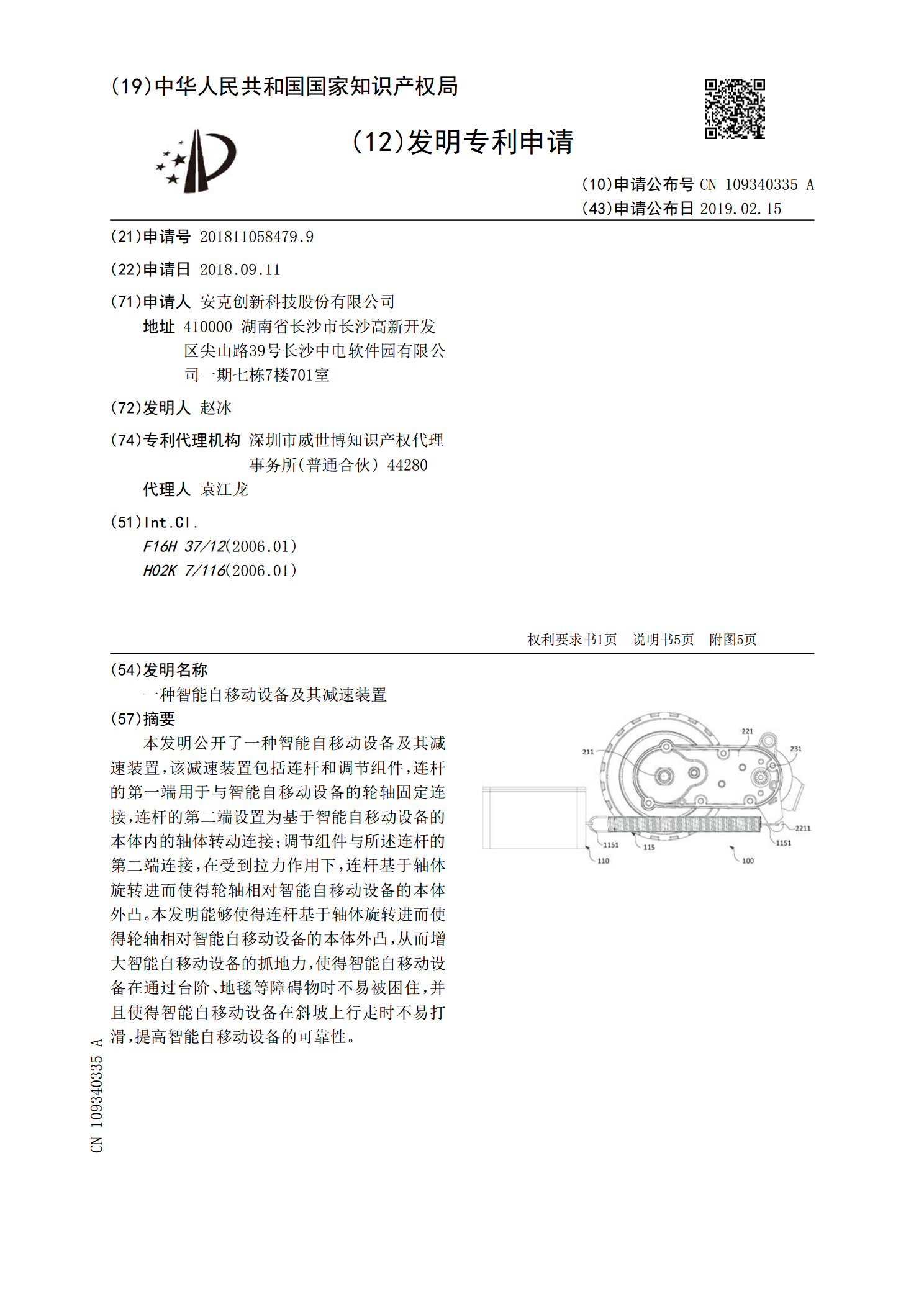
本发明公开了一种智能自移动设备及其减速装置,该减速装置包括连杆和调节组件,连杆的第一端用于与智能自移动设备的轮轴固定连接,连杆的第二端设置为基于智能自移动设备的本体内的轴体转动连接;调节组件与所述连杆的第二端连接,在受到拉力作用下,连杆基于轴体旋转进而使得轮轴相对智能自移动设备的本体外凸。本发明能够使得连杆基于轴体旋转进而使得轮轴相对智能自移动设备的本体外凸,从而增大智能自移动设备的抓地力,使得智能自移动设备在通过台阶、地毯等障碍物时不易被困住,并且使得智能自移动设备在斜坡上行走时不易打滑,提高智能自移动
一种智能移动设备的行走状态检测装置及智能移动设备.pdf
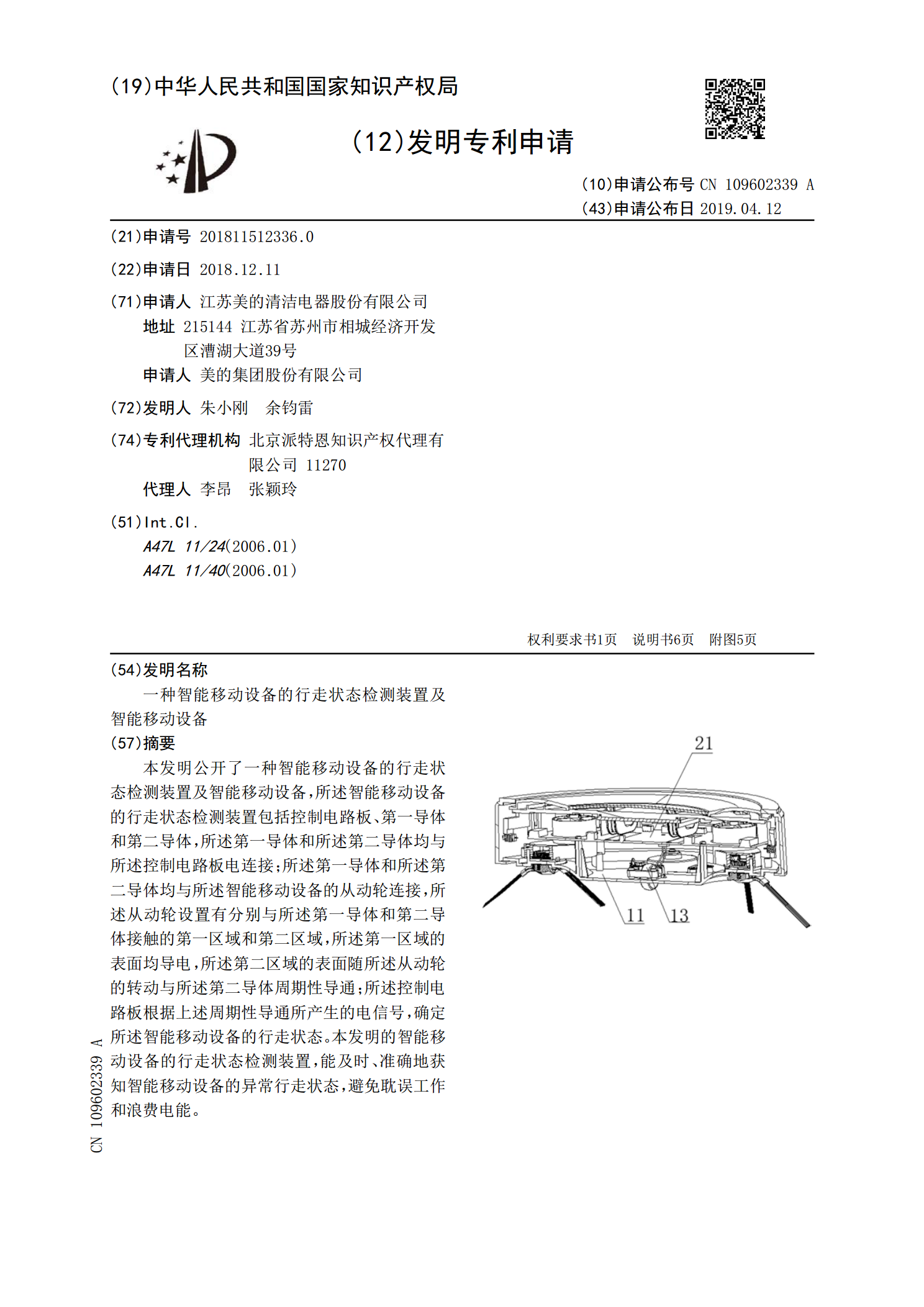
本发明公开了一种智能移动设备的行走状态检测装置及智能移动设备,所述智能移动设备的行走状态检测装置包括控制电路板、第一导体和第二导体,所述第一导体和所述第二导体均与所述控制电路板电连接;所述第一导体和所述第二导体均与所述智能移动设备的从动轮连接,所述从动轮设置有分别与所述第一导体和第二导体接触的第一区域和第二区域,所述第一区域的表面均导电,所述第二区域的表面随所述从动轮的转动与所述第二导体周期性导通;所述控制电路板根据上述周期性导通所产生的电信号,确定所述智能移动设备的行走状态。本发明的智能移动设备的行走状

一种自溜矿车减速装置.pdf
一种自溜矿车减速装置,包括:电控部分和机械部分,其中,电控部分包括断路器、接触器、热继电器、第一继电器、第二继电器、第一时间继电器、第二时间继电器、第一接近开关、第二接近开关和电动机,其中第一接近开关用于检测矿车位置,第二接近开关用于阻车板复位;当矿车到达第一接近开关时,第一接近开关检测到矿车到达时,第一时间继电器开始工作,经过设定时间的延时,接触器线圈得电,接触器闭合,电动机开始运转,阻车板开始向下运动;阻车板经过一个周期回到最高点时,第二个接近开关检测到阻车板回到初始状态,接触器线圈失电,电动机停止运

一种智能装置遥控的移动设备.pdf
本发明公开了一种智能装置遥控的移动设备,包括底座、开关、蓄电池、充电口、传动杆、滚轮、继电器、行走控制器、驱动电机、信号发射器、信号接收器和遥控器,底座上下两端均设有传动杆,传动杆两端均设有滚轮底座底座下方设有驱动电机,驱动电机上端设有继电器,继电器左侧设有行走控制器,驱动电机下端中部设有信号接收器,底座底部内左侧设有蓄电池,底座右端设有开关,底座左端开设有充电口,机器外设有遥控器,遥控器顶端左侧设有信号发射器,信号发射器通过螺丝固定在遥控器上;具备了操作简单,维修成本低、减小了工作时间和工作量、增加了设
一种驱动轮结构以及智能自移动装置.pdf
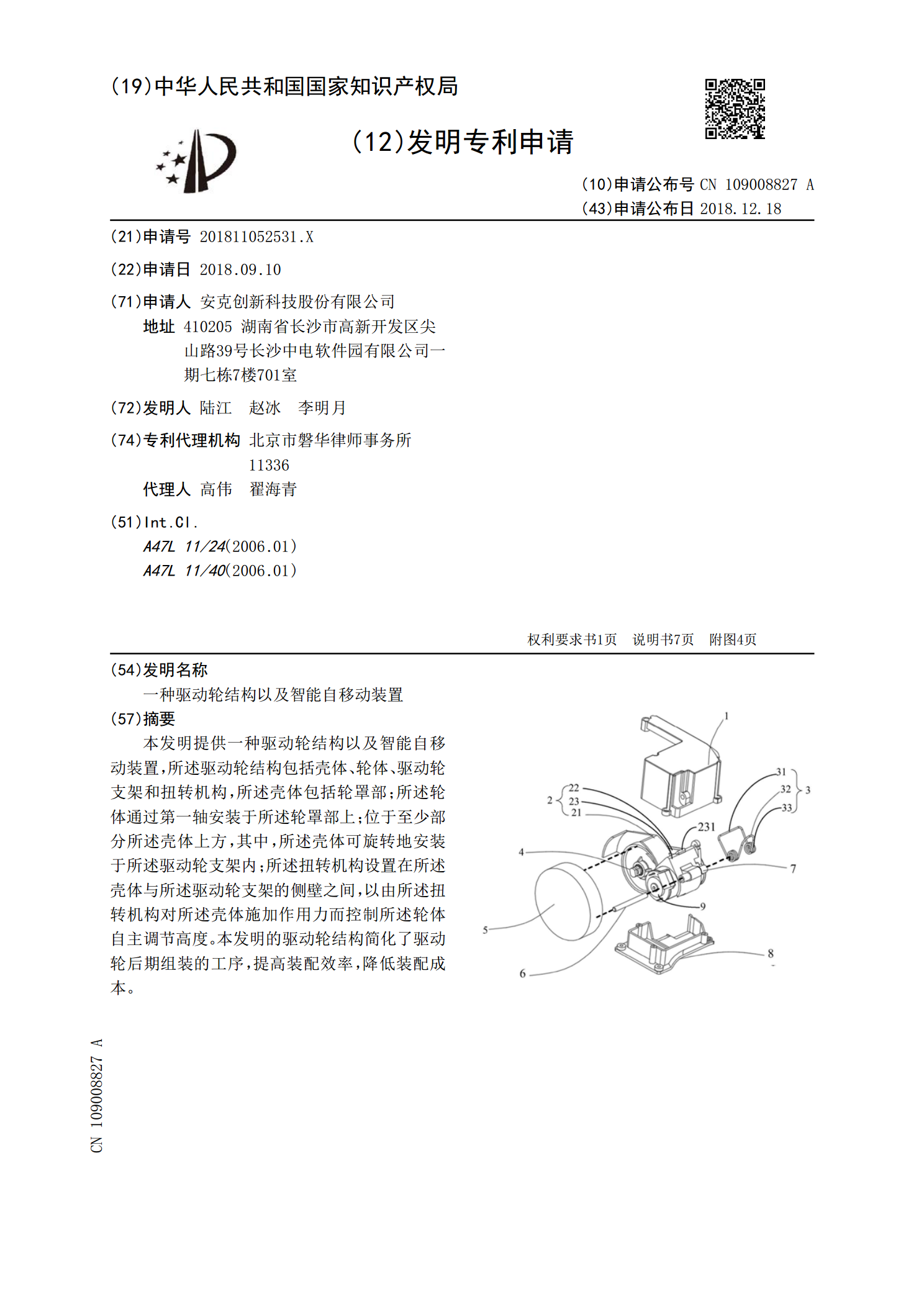
本发明提供一种驱动轮结构以及智能自移动装置,所述驱动轮结构包括壳体、轮体、驱动轮支架和扭转机构,所述壳体包括轮罩部;所述轮体通过第一轴安装于所述轮罩部上;位于至少部分所述壳体上方,其中,所述壳体可旋转地安装于所述驱动轮支架内;所述扭转机构设置在所述壳体与所述驱动轮支架的侧壁之间,以由所述扭转机构对所述壳体施加作用力而控制所述轮体自主调节高度。本发明的驱动轮结构简化了驱动轮后期组装的工序,提高装配效率,降低装配成本。