
一种智能移动设备的行走状态检测装置及智能移动设备.pdf

秀华****魔王

1/10

2/10

3/10
4/10

5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能移动设备的行走状态检测装置及智能移动设备.pdf
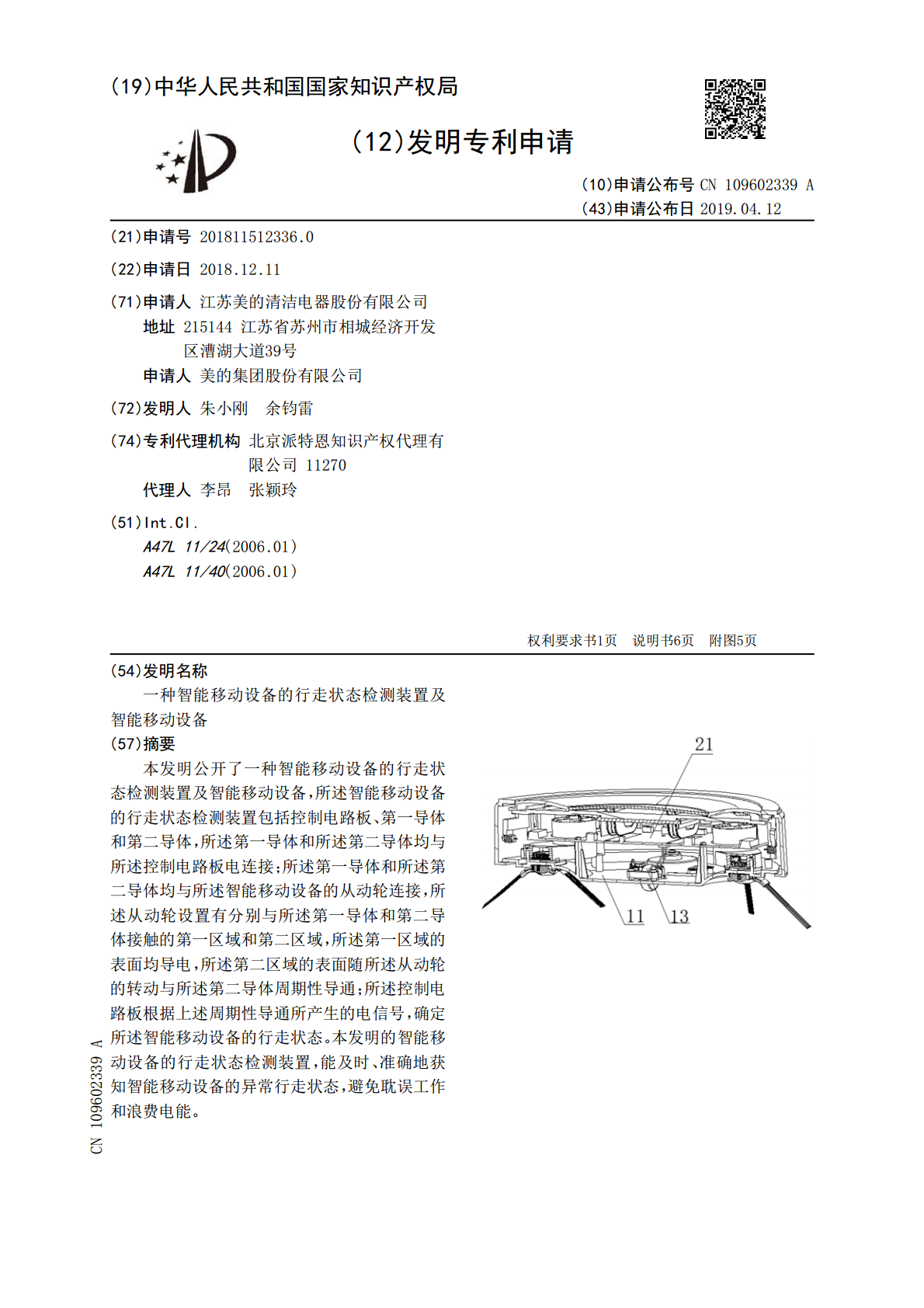
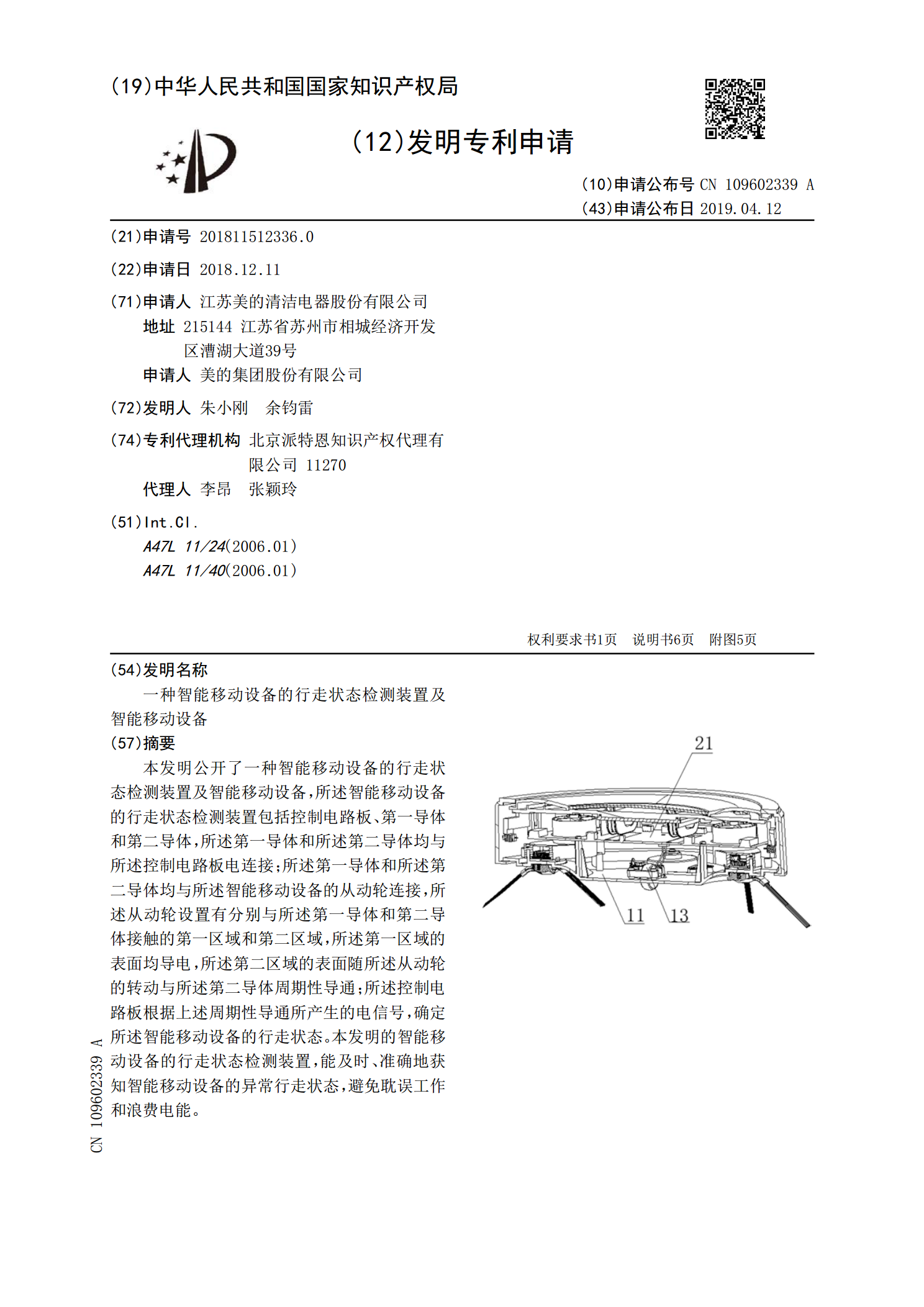
本发明公开了一种智能移动设备的行走状态检测装置及智能移动设备,所述智能移动设备的行走状态检测装置包括控制电路板、第一导体和第二导体,所述第一导体和所述第二导体均与所述控制电路板电连接;所述第一导体和所述第二导体均与所述智能移动设备的从动轮连接,所述从动轮设置有分别与所述第一导体和第二导体接触的第一区域和第二区域,所述第一区域的表面均导电,所述第二区域的表面随所述从动轮的转动与所述第二导体周期性导通;所述控制电路板根据上述周期性导通所产生的电信号,确定所述智能移动设备的行走状态。本发明的智能移动设备的行走状

一种智能装置遥控的移动设备.pdf
本发明公开了一种智能装置遥控的移动设备,包括底座、开关、蓄电池、充电口、传动杆、滚轮、继电器、行走控制器、驱动电机、信号发射器、信号接收器和遥控器,底座上下两端均设有传动杆,传动杆两端均设有滚轮底座底座下方设有驱动电机,驱动电机上端设有继电器,继电器左侧设有行走控制器,驱动电机下端中部设有信号接收器,底座底部内左侧设有蓄电池,底座右端设有开关,底座左端开设有充电口,机器外设有遥控器,遥控器顶端左侧设有信号发射器,信号发射器通过螺丝固定在遥控器上;具备了操作简单,维修成本低、减小了工作时间和工作量、增加了设
智能移动设备的驱动轮支架、驱动轮装置及智能移动设备.pdf
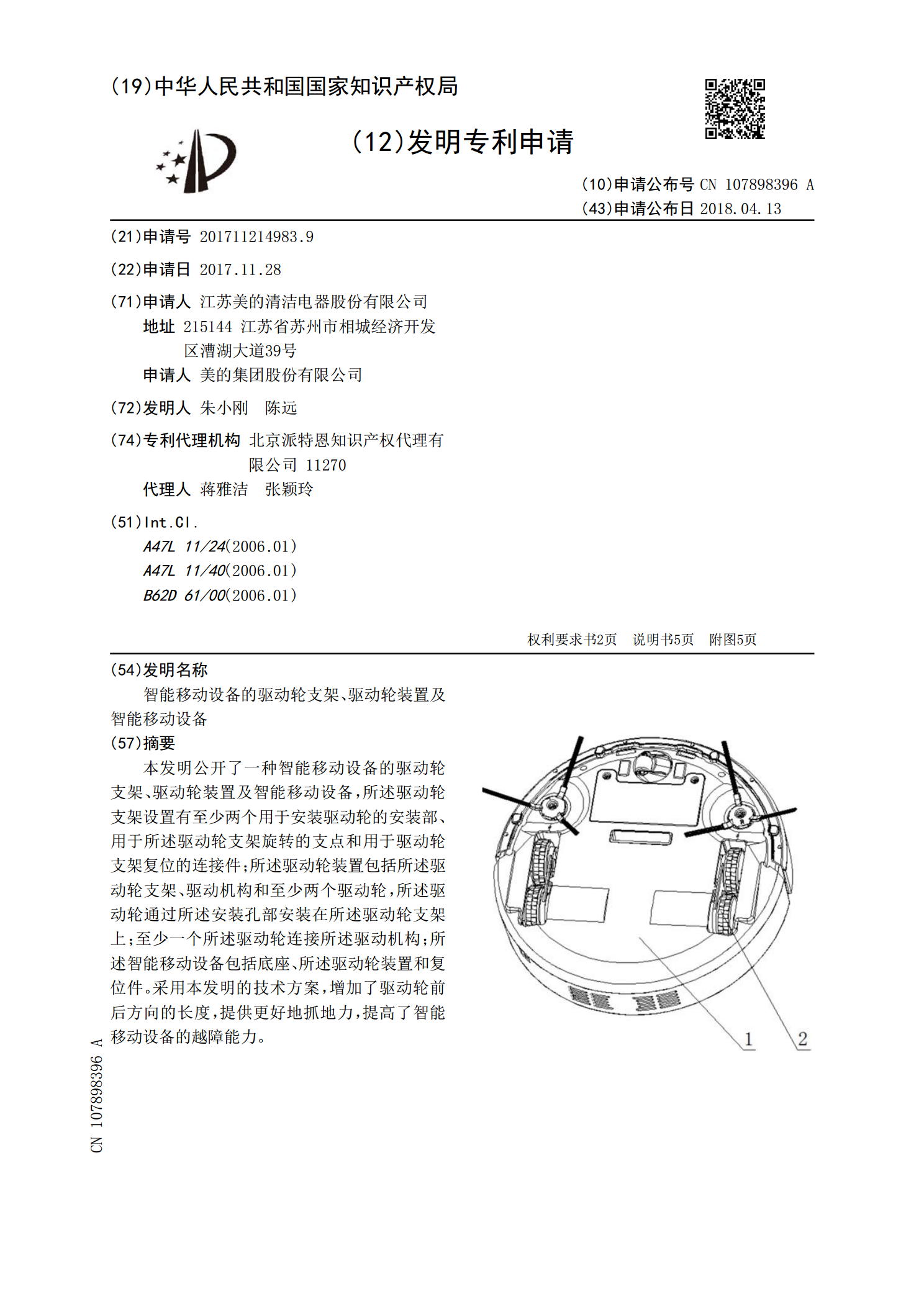
本发明公开了一种智能移动设备的驱动轮支架、驱动轮装置及智能移动设备,所述驱动轮支架设置有至少两个用于安装驱动轮的安装部、用于所述驱动轮支架旋转的支点和用于驱动轮支架复位的连接件;所述驱动轮装置包括所述驱动轮支架、驱动机构和至少两个驱动轮,所述驱动轮通过所述安装孔部安装在所述驱动轮支架上;至少一个所述驱动轮连接所述驱动机构;所述智能移动设备包括底座、所述驱动轮装置和复位件。采用本发明的技术方案,增加了驱动轮前后方向的长度,提供更好地抓地力,提高了智能移动设备的越障能力。
一种设备移动行走装置.pdf
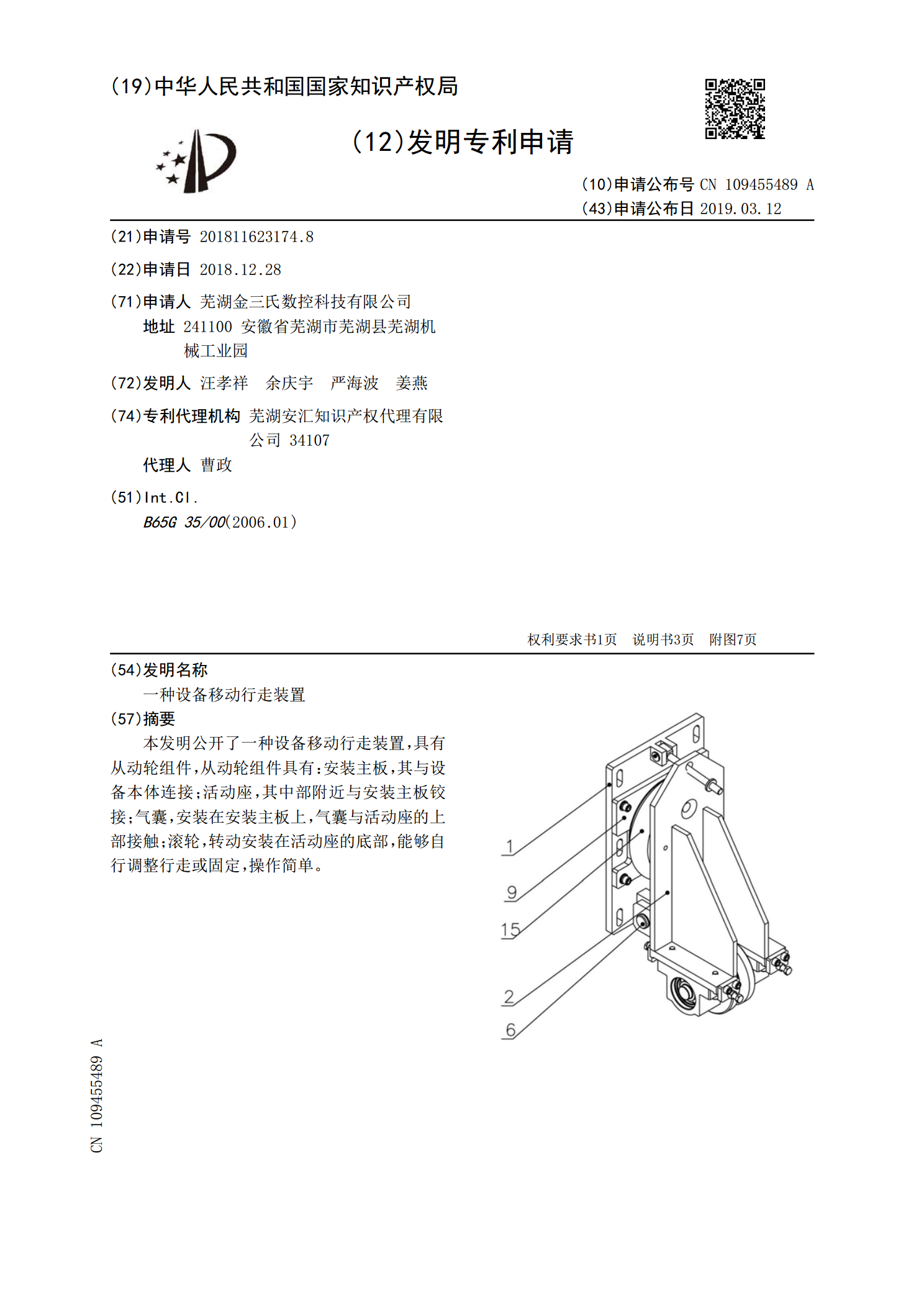
本发明公开了一种设备移动行走装置,具有从动轮组件,从动轮组件具有:安装主板,其与设备本体连接;活动座,其中部附近与安装主板铰接;气囊,安装在安装主板上,气囊与活动座的上部接触;滚轮,转动安装在活动座的底部,能够自行调整行走或固定,操作简单。
一种移动设备的智能管理方法及移动设备.pdf
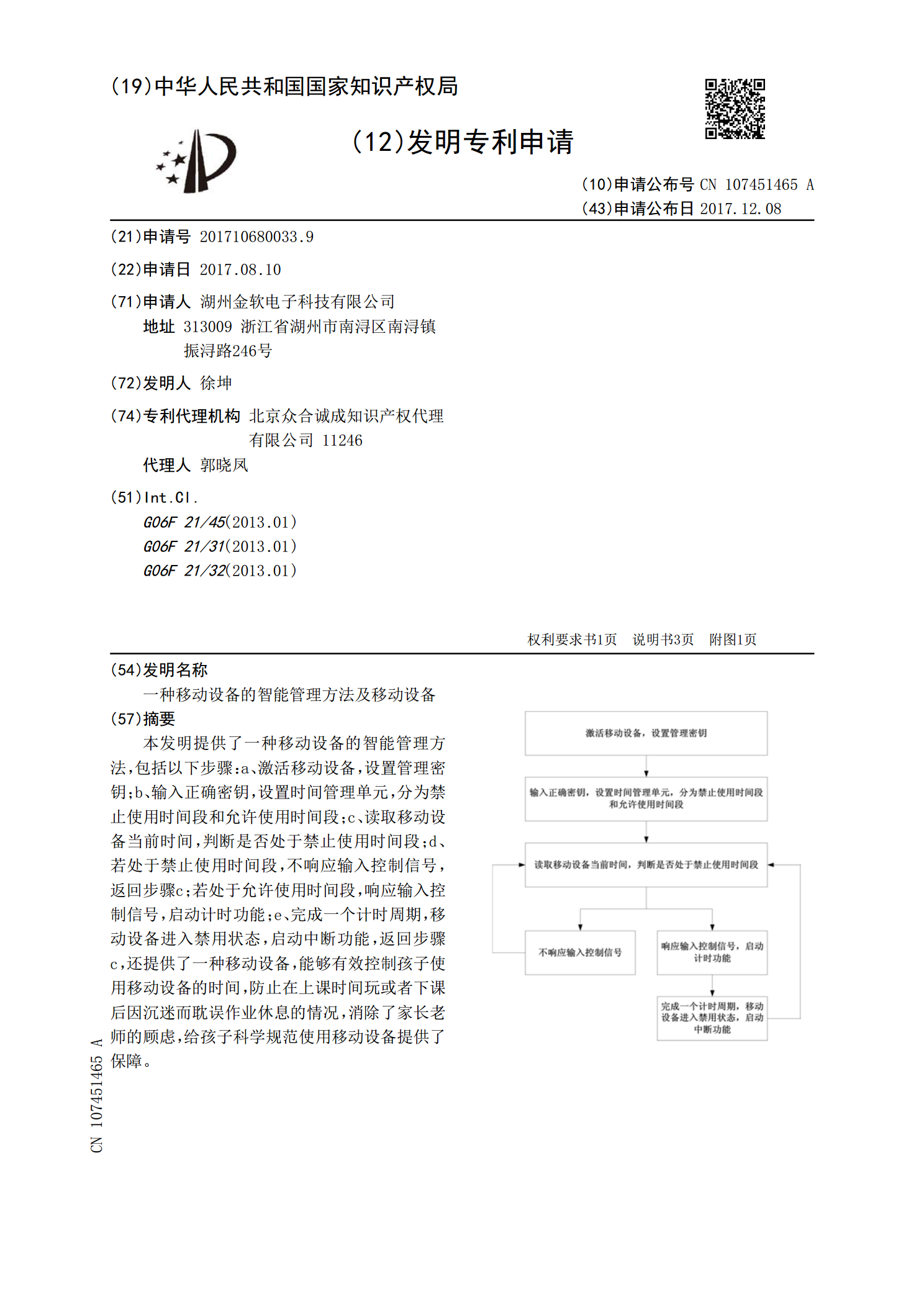
本发明提供了一种移动设备的智能管理方法,包括以下步骤:a、激活移动设备,设置管理密钥;b、输入正确密钥,设置时间管理单元,分为禁止使用时间段和允许使用时间段;c、读取移动设备当前时间,判断是否处于禁止使用时间段;d、若处于禁止使用时间段,不响应输入控制信号,返回步骤c;若处于允许使用时间段,响应输入控制信号,启动计时功能;e、完成一个计时周期,移动设备进入禁用状态,启动中断功能,返回步骤c,还提供了一种移动设备,能够有效控制孩子使用移动设备的时间,防止在上课时间玩或者下课后因沉迷而耽误作业休息的情况,消除